|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Системы и устройства силовых установок, работа которых управляется с помощью автоматических систем
В современных авиационных газотурбинных силовых установках (АГТСУ) автоматизированы следующие системы: · топливоподачи в основную и форсажную камеры сгорания; · запуска ГТД и пускового устройства; · управления сверзвуковым воздухозаборником (ВЗ) и реактивным соплом; · управления компрессором (К) и в ряде случаев турбиной (Т); · ограничения неуправляемых параметров рабочего процесса (ПРП) в управляемом объекте; · предотвращения или прекращения помпажа компрессора, возникающего по различным причинам; · управления воздушными винтами (для ТВД и вертолетных ГТД); · переключения программ управления (ПУ) при изменении режима работы силовой установки (СУ) и условий полета ЛА; · смазки и охлаждения элементов ГТД; · блокировок и т.д. В соответствии с ГОСТом 23851-79г. «Двигатели газотурбинные авиационные» (термины и определения) САУ АГТСУ – это совокупность систем управления (регулирования) воздухозаборником, турбокомпрессорным и форсажным контурами, реактивным соплом, воздушным винтом.
Рис. 6. Состав САУ АГТСУ Классификация основных типов АС управления современных АГТСУ
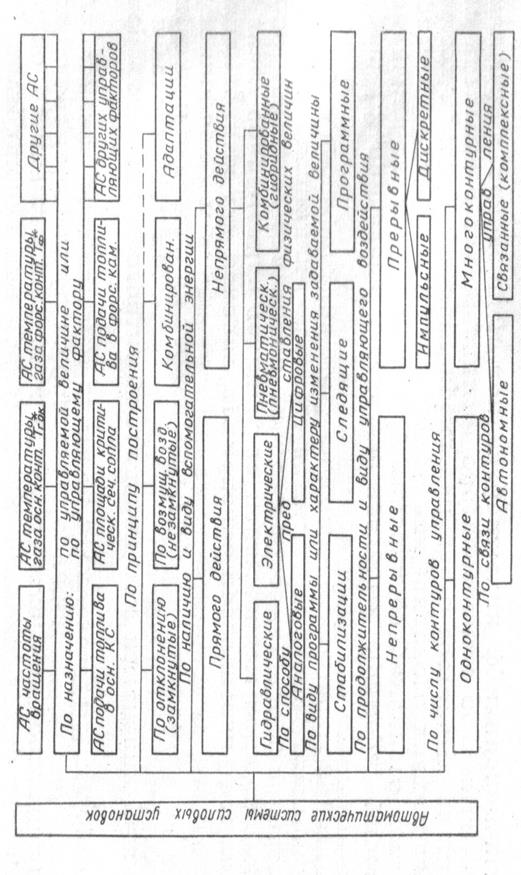
В силовых установках (СУ) авиационных ГТД находят применение почти все типы АС, которые знает современная техника. Общая классификация АС (рис. 7.): - по назначению; - по принципу построения (управления); - по наличию и виду вспомогательной энергии; - по виду программы или характеру изменения задаваемой величины; - по продолжительности и виду управляющего воздействия; - по числу контуров управления.
По назначению
АС именуются: § по объекту управления: 1). АС (ВЗ); 2). АС (К); 3). АС (СУ). § по управляемой величине: 1). АС частоты вращения; 2). АС температуры газа основного контура (Тг*ок); 3). АС температуры газа форсажного контура (Тф*). § по управляющему фактору: 1). АС подачи топлива в основную камеру сгорания (ОКС); 2). АС подачи топлива в форсажную камеру сгорания (ФКС); 3). АС площади критического сечения сопла (Fкр с).
1). Замкнутые (работающие по отклонению управляемой величины или по принципу обратной связи). 2). Незамкнутые (компенсирующие ВВ или по возмущающему воздействию). 3). Программные и комбинированные (использующие оба принципа одновременно). 4). Адаптации.
По наличию и виду вспомогательной энергии
1). АС прямого действия (для перемещения управляющего органа используется энергия измерительного устройства). 2). АС непрямого действия: - гидравлические; - электрические: § по способу представления физических величин: 1). Аналоговые; 2). Цифровые - пневматические (пневмонические); - комбинированные (гибридные); - комбинированные (гибридные, в которых используется 3 вида энергии).
По виду программы или характеру изменения задаваемой величины
1). АС стабилизации (УВ = const, САР(n), n = const). 2). АС слежения (например, следящие системы огневых установок). 3). АС программные (УВ = f (…), автопилот).
По продолжительности и виду управляющего воздействия
1). АС непрерывные (входные сигналы действуют непрерывно в течение всего времени работы системы). 2). АС прерывные: o импульсные; o дискретные (входные сигналы действуют только в течение коротких интервалов времени)
По числу контуров управления
1). АС одноконтурные (системы с одним входным и одним выходным сигналом). 2). АС многоконтурные (системы с несколькими входными и выходными сигналами): - по связи контуров управления: 1). Автономные. 2). Связанные (комплексные).
P.S. На каждой силовой установке (СУ) устанавливается столько АС, сколько управляемых (регулируемых) параметров или управляющих факторов (УФ) она имеет. В отдельных случаях основные АС резервируются аварийными.
Свойства САУ (САР)
Статические свойства
Под статическими свойствами системы понимается степень точности, с которой она способна поддерживать заданное значение регулируемого параметра (РП) на установившемся режиме. Количественно статические свойства системы оцениваются величиной остаточного отклонения Δ x(t) регулируемого параметра от заданного значения, установившегося после завершения процесса регулирования.
где: x0(t) – заданное (исходное) значение регулируемого параметра, x1(t) – значение регулируемого параметра, установившееся после завершения процесса регулирования. Величину Δ x(t) называют статической ошибкой системы. По этому признаку различают статические и астатические системы регулирования. Статической САУ (САР) называют такую систему, в которой на всех режимах работы принципиально невозможно точно поддерживать одно и то же значение регулируемого параметра. Астатической системой, соответственно, называют систему, в которой по завершении процесса регулирования регулируемый параметр принимает всегда одно и то же значение, равное заданному. Иначе говоря, в астатической системе статическая ошибка всегда равна нулю. Другими словами, причиной статизма является пропорциональность между регулирующим фактором (РФ) и регулируемым параметром (РП). Практически это означает, что в статическом регуляторе изменение положения регулирующего органа (РО), необходимое для компенсации последствий возмущений, может быть обеспечено только за счет некоторого изменения величины регулируемого параметра. Очевидно, что для сведения статической ошибки к нулю необходимо устранить указанную пропорциональность. Для этого в состав сервомеханизма регулятора включается астатическое звено (интегратор). При отсутствии возмущающих воздействий (ВВ) астатическое звено находится в состоянии безразличного равновесия, а при возникновении возмущений выходит из равновесия и изменяет величину регулирующего фактора до тех пор, пока система не вернется в исходное равновесное состояние. В качестве астатического звена обычно используются электродвигатели, гидравлические усилители и т.д. Характерными особенностями статической системы регулирования являются следующие: § равновесие системы может иметь место при различных значениях регулируемого параметра (РП); § каждому значению регулируемого параметра соответствует единственное определенное значение регулирующего фактора (РФ). Характерными особенностями астатической системы регулирования являются следующие: § равновесие системы может иметь место при единственном значении регулируемого параметра (РП), равного заданному значению; § заданное значение регулируемого параметра может быть достигнуто при различных значениях регулирующего фактора.
Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 865; Нарушение авторского права страницы

 СУ ВЗ
СУ ВЗ

 СУ турбокомпрессорным контуром
СУ турбокомпрессорным контуром
 СУ ФК ТРДФ (ТРДДФ)
СУ ФК ТРДФ (ТРДДФ)
 СУ РС
СУ РС
 СУ воздушным винтом ТВД
СУ воздушным винтом ТВД
 Защитные устройства СУ
Защитные устройства СУ