
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Особенности AP/FD в режиме MANAGED
Особенности AP/FD в режиме SELECTED Экипаж работает с этими режимами путем вытягивания соответствующих рукояток на FCU.
Горизонтальные режимы AP/FD Эти режимы обеспечивают горизонтальную навигацию полета в соответствии с настройками FCU, сделанными пилотом вручную (режим SELECTED) или планом полета, введенном в FMGC (режим MANAGED). Активный режим горизонтальной навигации отображается зеленым цветом на FMA в третьей колонке; режим, ожидающий активации - синим цветом на второй линии. Ø RWY, RWY TRK - Режимы ВПП и ВПП track; Ø NAV - Основной режим горизонтальной навигации согласно введенному плану полета; Ø HDG, TRK - Режимы КУРС и TRACK (их называют «базовыми» режимами); Ø APP NAV - Режим захода на посадку с использованием горизонтальной навигации; Ø LOC*, LOC - Режимы захвата и удержания курсового маяка КГС; Ø LOC B/C - Режим обратного курса; Ø ROLL OUT - Окончание пробега (при автоматической посадке); Ø GA TRK - Режим ухода на второй круг;
Ø LAND - Посадочный режим, объединяющий APP NAV и G/S (вертикальный режим AP/FD). Задействуется на высоте ниже 400 футов; Ø FINAL APP - Посадочный режим для неточных заходов на посадку, объединяет APP NAV и FINAL (вертикальный режим AP/FD).
На взлете пилот переводит РУД в гейт FLEX или TOGA. В этот момент автоматически активируется режим горизонтальной навигации RWY (runway). Он призван помочь пилоту выдерживать взлетный курс на разбеге в соответствии с курсом ВПП и работает только при условии наличия у ВПП оборудования для захода на посадку по курсо-глиссадной системе (ILS). По достижении самолетом 30 футов AGL, режим RWY автоматически сменится на NAV (при условии введенного в MCDU плана полета).
MANAGED-режим NAVIGATION (NAV)
Режим NAV может использоваться используется для возврата на маршрут:
- нажимаем рукоятку HDG: режим NAV переходит в состояние ARM; - при входе ВС в зону перехвата участка трассы, режим NAV из ARM будет задействован автоматически[55].
Взаимодействие режима NAV с вертикальными режимами AP/FD - Когда задействован режим NAV, вертикальные режимы CLB, DES и FINAL принимают во внимание наличие путевых точек-ограничителей по скорости и высоте[56], включенных в горизонтальную часть плана полета MCDU. Если NAV не задействован, а вертикальные managed-режимы не активны, то constraints (CSTR) будут игнорироваться; - При заходе на посадку режим NAV автоматически сменится на LOC при условии, что ILS настроен (введены частота и посадочный курс), самолет находится на высоте больше 400 футов AGL, а режим LOC переведен в ARM. Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 599; Нарушение авторского права страницы
 Во время взлета режимы MANAGED задействуются автоматически при переводе пилотом РУД в гейты FLX или TOGA;
Во время взлета режимы MANAGED задействуются автоматически при переводе пилотом РУД в гейты FLX или TOGA;  MANAGED-режим RUNWAY (RNW)
MANAGED-режим RUNWAY (RNW)  Если же план полета введен не корректно[54] и режим NAV не активировался, то автоматически подключится режим RWY TRK с тем, чтобы при взлете сохранить взлетный курс ВПП и дать возможность пилоту выбрать режим горизонтальной навигации вручную (SELECTED).
Если же план полета введен не корректно[54] и режим NAV не активировался, то автоматически подключится режим RWY TRK с тем, чтобы при взлете сохранить взлетный курс ВПП и дать возможность пилоту выбрать режим горизонтальной навигации вручную (SELECTED). Режим управляет самолетом в соответствии с курсом полета, заложенного в FMGS. Режим разработан так, чтобы свести к нулю разницу между курсом полета и направления носа ВС (HDG и TRACK). Если режим горизонтальной навигации был приведен в ARM до взлета, то по достижении самолетом 30 футов AGL, режим RWY автоматически сменится на NAV. В полете пилот может задействовать режим NAV нажатием рукоятки HDG ( при введенном в MCDU плане).
Режим управляет самолетом в соответствии с курсом полета, заложенного в FMGS. Режим разработан так, чтобы свести к нулю разницу между курсом полета и направления носа ВС (HDG и TRACK). Если режим горизонтальной навигации был приведен в ARM до взлета, то по достижении самолетом 30 футов AGL, режим RWY автоматически сменится на NAV. В полете пилот может задействовать режим NAV нажатием рукоятки HDG ( при введенном в MCDU плане).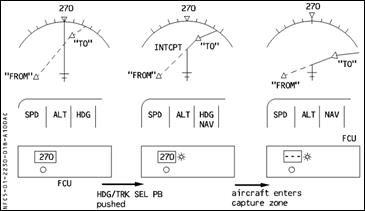 - будучи вне трассы, выставляем HDG так, чтобы курс пересекал линию активного участка маршрута;
- будучи вне трассы, выставляем HDG так, чтобы курс пересекал линию активного участка маршрута;