
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Следствия из первого замечательного пределаСтр 1 из 7Следующая ⇒
Свойства определителей Определитель не изменяется при транспонировании: det AT = det A. При перестановке любых двух строк, определитель меняет знак. Если в определителе есть две одинаковые строки, то он равен нулю. Если все элементы строки определителя умножить на отличное от нуля число, то определитель умножается на это число Определитель с двумя пропорциональными строками равен нулю. Определитель, содержащий нулевую строку, равен нулю Если каждый элемент какой либо строки определителя представлен в виде суммы двух слагаемыхто его можно представить в виде суммы двух определителей Определитель не изменится, если к элементам любой его строки прибавить элементы любой другой строки, умноженные на одно и то же число.Поскольку определитель не меняется при транспонировании, приведенные выше утверждения справедливы и для столбцов. 2)Вычисление определителей второго порядка. Вычисление определителей третьего порядка. 3) Основные виды матриц: Матричные операции Сложение и вычитание допускается только для матриц одинакового размера. Существует нулевая матрица
Все элементы нулевой матрицы равны нулю. Возводить в степень можно только квадратные матрицы. Ассоциативность сложения: Коммутативность сложения: Ассоциативность умножения: Дистрибутивность умножения относительно сложения:
С учётом упомянутых выше свойств, матрицы образуют кольцо относительно операций сложения и умножения.
4)Произведением матрицы
Умножать матрицы можно тогда и только тогда, когда количество столбцов первой матрицы равно количеству строк второй матрицы. 5)основные операции с матрицами: сложение, разность, умножение. Суммой двух матриц A=(aij) и B=(bij) с одинаковым количеством m строк и n столбцов называется матрица C=(cij), элементы которой определяются равенством aij+bij=cij(i=1, 2..., m; j==1, 2..., n; ). . Произведением матрицы A=(aij) на число 6)Минором Задание. Найти минор Решение. Вычеркиваем в заданном определителе вторую строку и третий столбец:
тогда Алгебраическое дополнение Алгебраическим дополнением Задание. Найти алгебраическое дополнение Решение.
7) Обра́ тная ма́ трица — такая матрица A− 1, при умножении на которую, исходная матрица A даёт в результате единичную матрицу E: 8) Общее число линейно независимых строк или столбцов называется рангом матрицы.Ранг определятся числом числом не нулевых строк матрицы треугольного вида 9) Элементарными преобразованиями матрицы называются следующие ее преобразования: I. Перестановка двух столбцов (строк) матрицы. II. Умножение всех элементов одного столбца (строки) матрицы на одно и то же число, отличное от нуля. II. Прибавление к элементам одного столбца (строки) соответствующих элементов другого столбца (строки), умноженных на одно и то же число. Матрица B, полученная из исходной матрицы A конечным числом элементарных преобразований, называется эквивалентной. Это обозначается A\sim B. Алгоритм приведения матрицы к ступенчатому виду Чтобы привести матрицу к ступенчатому виду нужно выполнить следующие действия. 1. В первом столбце выбрать элемент, отличный от нуля (ведущий элемент). Строку с ведущим элементом (ведущая строка), если она не первая, переставить на место первой строки (преобразование I типа). Если в первом столбце нет ведущего (все элементы равны нулю), то исключаем этот столбец, и продолжаем поиск ведущего элемента в оставшейся части матрицы. Преобразования заканчиваются, если исключены все столбцы или в оставшейся части матрицы все элементы нулевые. 2. Разделить все элементы ведущей строки на ведущий элемент (преобразование II типа). Если ведущая строка последняя, то на этом преобразования следует закончить. 3. К каждой строке, расположенной ниже ведущей, прибавить ведущую строку, умноженную соответственно на такое число, чтобы элементы, стоящие под ведущим оказались равными нулю (преобразование III типа). 4. Исключив из рассмотрения строку и столбец, на пересечении которых стоит ведущий элемент, перейти к пункту 1, в котором все описанные действия применяются к оставшейся части матрицы. 10) Система Здесь Система называется однородной, если все её свободные члены равны нулю, Система называется квадратной, если число Решение системы уравнений — совокупность Система называется совместной, если она имеет хотя бы одно решение, и несовместной, если у нее нет ни одного решения. Совместная система может иметь одно или более решений.Решения Совместная система называется определенной, если она имеет единственное решение; если же у нее есть хотя бы два различных решения, то она называется неопределенной. Если уравнений больше, чем неизвестных, она называется переопределённо Методы решения Прямые (или точные) методы решения СЛАУ позволяют найти решение за определенное количество шагов. К прямым методам относятся метод Гаусса, метод Гаусса — Жордана, метод Крамера, матричный метод и метод прогонки (для трёхдиагональных матриц).Итерационные методы основаны на использовании повторяющегося процесса. Они позволяют получить решение в результате последовательных приближений. К итерационным методам относятся метод Якоби (метод простой итерации), метод Гаусса — Зейделя, метод релаксации и многосеточный метод. 11) Теоре́ ма Кро́ некера — Капе́ лли — критерий совместности системы линейных алгебраических уравнений: Система линейных алгебраических уравнений совместна тогда и только тогда, когда ранг её основной матрицы равен рангу её расширенной матрицы, причём система имеет единственное решение, если ранг равен числу неизвестных, и бесконечное множество решений, если ранг меньше числа неизвестных. 12) Метод Крамера предназначен для решения тех систем линейных алгебраических уравнений (СЛАУ), у которых определитель матрицы системы отличен от нуля. Естественно, при этом подразумевается, что матрица системы квадратна (понятие определителя существует только для квадратных матриц). Суть метода Крамера можно выразить в трёх пунктах: 1. Составить определитель матрицы системы (его называют также определителем системы), и убедиться, что он не равен нулю, т.е. Δ ≠ 0. 2. Для каждой переменной xi(i=1, n¯ ¯ ¯ ¯ ¯ ) необходимо составить определитель Δ xi, полученный из определителя Δ заменой i-го столбца столбцом свободных членов заданной СЛАУ. 3. Найти значения неизвестных по формуле xi=Δ xiΔ (i=1, n¯ ¯ ¯ ¯ ¯ ). 13) Метод Гаусса является одним из самых наглядных и простых способов решения систем линейных алгебраических уравнений (СЛАУ): как однородных, так и неоднородных. Коротко говоря, суть этого метода состоит в последовательном исключении неизвестных. 14) Метод обратной матрицы (Матричный метод) решения систем линейных алгебраических уравнений с ненулевым определителем основной матрицы состоит в поиске матрицы, обратной к основной матрице, и умножению ее на матрицу свободных членов. 16) Если в общем уравнении прямой
где a – угол, образованный прямой с положительным направлением оси Однозначно определить прямую можно, задав одну точку и угловой коэффициент. А именно, уравнение прямой, проходящей через точку .
17) Пусть даны точки A(x1; y1) и B(x2; y2). Уравнение прямой, проходящей через точки A(x1; y1) и B(x2; y2) имеет вид: 18) Если прямая отсекает на осях отрезки a, b (не равные нулю), то её можно представить уравнением 19) Пусть две неперпендикулярные прямые A1, A2 (взятые в данном порядке) представляются уравнениями Замечание 1. 1. Когда прямая A2 параллельно оси OY, а A1 не параллельна, применяем формулу
Замечание 2. Замечание 3. Если данные точки A и B лежат на прямой, параллельной оси Ox (у2-у1=0) или оси Oу (х2-х1=0), то уравнение прямой будет соответственно иметь вид у=у1 или х=х1
20) Эллипсом называется геометрическое место точек, для которых сумма расстояний до двух фиксированных точек плоскости, называемых фокусами, есть постоянная величина, большая, чем расстояние между фокусами. Постоянную сумму расстояний произвольной точки эллипса до фокусов принято обозначать через 2а. Фокусы эллипса обозначают буквами Пусть дан эллипс. Если оси декартовой прямоугольной системы координат выбраны так, что фокусы данного эллипса располагаются на оси абсцисс симметрично относительно начала координат, то в этой системе координат уравнение данного эллипса имеет вид
где
21) Гипербола представляет собой плоскую кривую, для каждой точки которой модуль разности расстояний до двух заданных точек (фокусов гиперболы) является постоянным. Расстояние между фокусами гиперболы называется фокусным расстоянием и обозначается через 2c. Середина отрезка, соединяющего фокусы, называется центром. У гиперболы имеются две оси симметрии: фокальная или действительная ось, проходящая через фокусы, и перпендикулярная ей мнимая ось, проходящая через центр. Действительная ось пересекает ветви гиперболы в точках, которые называются вершинами. Отрезок, соединяющий центр гиперболы с вершиной, называется действительной полуосью и обозначается через a. Мнимая полуось обозначается символом b. Каноническое уравнение гиперболызаписывается в виде Параболой называется плоская кривая, в каждой точки которой выполняется следующее свойство: расстояние до заданной точки (фокуса параболы) равно расстоянию до заданной прямой (директрисы параболы). Расстояние от фокуса до директрисы называется параметром параболы и обозначается через p. Парабола имеет единственную ось симметрии, которая пересекает параболу в ее вершине.Каноническое уравнение параболы имеет вид y = 2px. 22) Поверхность второго порядка — геометрическое место точек трёхмерного пространства, прямоугольные координаты которых удовлетворяют уравнению вида Пусть поверхность S задана в прямоугольной системе координат уравнением F(x, y, z)=0. Поверхность S пересекаем плоскостями, параллельными координатным плоскостям (или самими координатными плоскостями), и находим линии пересеченияповерхности с этими плоскостями. По виду этих линий и выносится суждение о форме поверхности S. Применение метода сечений основано на следующей теореме. Теорема 132. Пусть в прямоугольной системе координат заданы поверхность S уравнением (1) и плоскость, параллельная плоскости или совпадающая с ней, уравнением z = h. Если поверхность S пересекается с плоскостью по 23) В декартовых прямоугольных координатах уравнение любой плоскости приводиться к виду Ax+By+Cz+D=0 (14) Уравнение (14) называется общим уравнением плоскости. Коэффициенты A, B, C являются координатами вектора 25) Каноническое уравнение прямой Уравнение прямой в пространстве, проходящей через две данные точки Прямая как пересечение двух плоскостей
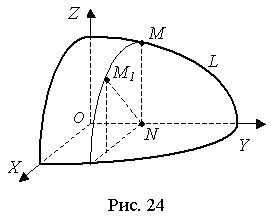
26) Определение. Цилиндрической поверхностью называется поверхность (рис. 18), образованная прямыми (образующими), параллельными некоторой данной прямой L и пересекающими данную линию С (направляющую). 27) Определение. Поверхностью вращения называется поверхность, образованная вращением какой-либо плоской линии вокруг прямой, лежащей в плоскости этой линии. Для вывода уравнения поверхности вращения необходимо выбрать систему координат. Чтобы уравнение поверхности вращения выглядело проще, ось вращения принимают за одну из координатных осей.
Пусть в координатной плоскости Oyz задана кривая L уравнением F(Y, Z)=0 (рис. 24). Вращаем кривую L вокруг оси Oy. Получим некоторую поверхность. Пусть M(x, y, z) - произвольная точка получившейся поверхности. Тогда
Следовательно, имеем Y = y, Конические поверхности Определение. Конической поверхностью называется поверхность (рис. 23), образованная прямыми (образующими конуса), проходящими через данную точку (вершину конуса) и пересекающими данную линию (направляющую конуса). Исключая из уравнений (60) и (61) x, y, z, получим уравнение относительно переменных X, Y, Z, т.е. уравнение конической поверхности. 28) ПОНЯТИЕ ФУНКЦИИ. СПОСОБЫ ЗАДАНИЯ ФУНКЦИИФункцией называется закон, по которому числу х из заданного множества Х, поставлено в соответствие только одно число у, пишут Заключается он в том, что функция задается формулой, устанавливающей, какие операции нужно произвести над х, чтобы найти у. Например Рассмотрим первый пример - .
29). Понятие о сложной функции 2. Взаимно обратные функции 3. График обратной функции 4. Свойства взаимно обратных функций 30) Предел последовательности Если каждому натуральному числу n поставлено в соответствие некоторое вещественное число Существует несколько способов задания числовых последовательностей. 1. Последовательность может быть задана при помощи формулы, позволяющей вычислить каждый ее член по номеру (например, ). 2. Часто последовательность задается при помощи рекуррентной формулы, позволяющей определить каждый член последовательности по одному или нескольким предыдущим; при этом необходимо задание одного или нескольких первых членов последовательности. К таковым относятся арифметическая и геометрическая прогрессии или, например, последовательность Фибоначчи, задаваемая формулой
3. и условиями x1 = 1, x2 = 1. 4. Иногда последовательность задается описанием ее членов, например, последовательность, у которой xn равен n-му знаку после запятой в десятичной записи числа π = 3, 14159265358979323..., задается следующим образом: x1 = 1, x2 = 4, x3 = 1, x4 = 5, x5 = 9, x6 = 2, x7 = 6, x8 = 5, x9 = 3, x10 = 5 и т. д. Число a называется пределом последовательности {xn}, если для каждого ε > 0 существует такой номер Nε , что для всех n ≥ Nε выполняется неравенство
т. е. Интервал (a – ε; a + ε ) называют ε -окрестностью точки a. 31) Предел функции. ЧислоL называется пределом функции y = f ( x ) при x, стремящемся к a: 32) Первый замечательный предел Теорема Асимптоты графика функции Назовём асимптотами прямые линии, к которым неограниченно приближается график функции, когда точка графика неограниченно удаляется от начала координат. В зависимости от поведения аргумента при этом, различаются два вида асимптот: вертикальные и наклонные. Вертикальная[ Вертикальная асимптота — прямая вида Как правило, при определении вертикальной асимптоты ищут не один предел, а два односторонних (левый и правый). Это делается с целью определить, как функция ведёт себя по мере приближения к вертикальной асимптоте с разных сторон. Например: 1. 2. Замечание: обратите внимание на знаки бесконечностей в этих равенствах. Горизонтальная Горизонтальная асимптота — прямая вида
Наклонная Наклонная асимптота — прямая вида
Пример наклонной асимптоты 1. 2. Замечание: функция может иметь не более двух наклонных (горизонтальных) асимптот. Замечание: если хотя бы один из двух упомянутых выше пределов не существует (или равен
39) Производная. Рассмотрим некоторую функцию y = f ( x ) в двух точках x0 и x0 +
Геометрический смысл производной. Рассмотрим график функции y = f ( x ):
Уравнение касательной. Выведем уравнение касательной к графику функции в точке A ( x0, f ( x0 ) ). В общем случае уравнение прямой с угловым коэффициентом f ’( x0 ) имеет вид: y = f ’( x0 ) · x + b.Чтобы найти b, воспользуемся тем, что касательная проходит через точку A: f ( x0 ) = f ’( x0 ) · x0 + b, отсюда, b = f ( x0 ) – f ’( x0 ) · x0, и подставляя это выражение вместо b, мы получим уравнение касательной: y = f ( x0 ) + f ’( x0 ) · ( x – x0 ). |
Последнее изменение этой страницы: 2017-03-15; Просмотров: 398; Нарушение авторского права страницы






 такая, что её прибавление к другой матрице A не изменяет A, то есть
такая, что её прибавление к другой матрице A не изменяет A, то есть




 Свойства операции транспонирования матриц:
Свойства операции транспонирования матриц: 

 , если обратная матрица
, если обратная матрица  существует
существует  .
. на матрицу
на матрицу  называется матрица
называется матрица  такая, что элемент матрицы
такая, что элемент матрицы  , стоящий в
, стоящий в  -ой строке и
-ой строке и  -ом столбце, т.е. элемент
-ом столбце, т.е. элемент  , равен сумме произведений элементов
, равен сумме произведений элементов  на соответствующие элементы
на соответствующие элементы .
.
 называется матрица, у которой каждый элемент равен произведению соответствующего элемента матрицы А на число
называется матрица, у которой каждый элемент равен произведению соответствующего элемента матрицы А на число 

 к элементу
к элементу  определителя
определителя  -го порядка называется определитель
-го порядка называется определитель  -го порядка, полученный из исходного вычеркиванием
-го порядка, полученный из исходного вычеркиванием  к элементу
к элементу  определителя
определителя  .
.

 к элементу
к элементу 
 к элементу
к элементу 
 линейных алгебраических уравнений с
линейных алгебраических уравнений с  неизвестными — это система уравнений вида
неизвестными — это система уравнений вида — неизвестные, которые надо определить. Коэффициенты системы
— неизвестные, которые надо определить. Коэффициенты системы  и её свободные члены
и её свободные члены  предполагаются известными. Индексы коэффициента
предполагаются известными. Индексы коэффициента  системы обозначают номера уравнения
системы обозначают номера уравнения  и неизвестного
и неизвестного  , при котором стоит этот коэффициент.
, при котором стоит этот коэффициент. , иначе — неоднородной.
, иначе — неоднородной. , таких что подстановка каждого
, таких что подстановка каждого  вместо
вместо  в систему обращает все её уравнения в тождества.
в систему обращает все её уравнения в тождества. совместной системы называются различными, если нарушается хотя бы одно из равенств
совместной системы называются различными, если нарушается хотя бы одно из равенств , то его можно записать в виде уравнения с угловым коэффициентом
, то его можно записать в виде уравнения с угловым коэффициентом 
 угловой коэффициент,
угловой коэффициент,  ,
,  – свободный член, равный ординате точки пересечения прямой с осью
– свободный член, равный ординате точки пересечения прямой с осью  .
. с угловым коэффициентом
с угловым коэффициентом  , определяется по формуле
, определяется по формуле 
 Если данные точки A и B лежат на прямой, параллельной оси Ox (у2-у1=0) или оси Oу (х2-х1=0), то уравнение прямой будет соответственно иметь вид у=у1 или х=
Если данные точки A и B лежат на прямой, параллельной оси Ox (у2-у1=0) или оси Oу (х2-х1=0), то уравнение прямой будет соответственно иметь вид у=у1 или х=


 и
и  , расстояние между ними - через 2с. По определению эллипса
, расстояние между ними - через 2с. По определению эллипса  или
или  .
.
 ; очевидно,
; очевидно,  . Уравнение вида (1) называется каноническим уравнением эллипса
. Уравнение вида (1) называется каноническим уравнением эллипса Уравнение (35) и есть каноническое уравнение окружности с центром в точке С(а, b) и радиусом R.
Уравнение (35) и есть каноническое уравнение окружности с центром в точке С(а, b) и радиусом R.
 в котором по крайней мере один из коэффициентов
в котором по крайней мере один из коэффициентов  ,
,  ,
,  ,
,  ,
,  ,
,  отличен от нуля.
отличен от нуля. , перпендикулярного к плоскости, заданной уравнением (14). Он называется нормальным вектором этой плоскости и определяет ориентацию плоскости в пространстве относительно системы координат.Существуют различные способы задания плоскости и соответствующие им виды уравнения. 1. Уравнение плоскости по точке и нормальному вектору. Если плоскость проходит через точку M0(x0, y0, z0) и перпендикулярна к вектору
, перпендикулярного к плоскости, заданной уравнением (14). Он называется нормальным вектором этой плоскости и определяет ориентацию плоскости в пространстве относительно системы координат.Существуют различные способы задания плоскости и соответствующие им виды уравнения. 1. Уравнение плоскости по точке и нормальному вектору. Если плоскость проходит через точку M0(x0, y0, z0) и перпендикулярна к вектору  где a≠ 0, b≠ 0, c≠ 0 3. Уравнение плоскости по трем точкам. Если плоскость проходит через точки Mi(xi, yi, zi (i=1, 3), не лежащие на одной прямой, то ее уравнение можно записать в виде:
где a≠ 0, b≠ 0, c≠ 0 3. Уравнение плоскости по трем точкам. Если плоскость проходит через точки Mi(xi, yi, zi (i=1, 3), не лежащие на одной прямой, то ее уравнение можно записать в виде: 
 где (х0; у0; z0) – точка прямой,
где (х0; у0; z0) – точка прямой,  (k; l; m) – направляющий вектор.
(k; l; m) – направляющий вектор.

 , где
, где  и
и  – векторы нормалей данных плоскосте линии, то проекция линии на плоскость в системе координат имеет уравнение F (x, y, h) = 0
– векторы нормалей данных плоскосте линии, то проекция линии на плоскость в системе координат имеет уравнение F (x, y, h) = 0

 , но
, но  т.к. если взять точку M1 с отрицательной аппликатой, то
т.к. если взять точку M1 с отрицательной аппликатой, то
 и координаты точки M(x, y, z) удовлетворяют уравнению
и координаты точки M(x, y, z) удовлетворяют уравнению  Уравнение (62) и есть искомое уравнение поверхности вращения.
Уравнение (62) и есть искомое уравнение поверхности вращения. Пусть направляющая конуса задана уравнениями:
Пусть направляющая конуса задана уравнениями:  а вершина S конуса имеет координаты x0, y0, z0.Уравнения образующей запишем как уравнения прямой, проходящей через две точки S(x0, y0, z0) и M(x, y, z), принадлежащие направляющей (60):
а вершина S конуса имеет координаты x0, y0, z0.Уравнения образующей запишем как уравнения прямой, проходящей через две точки S(x0, y0, z0) и M(x, y, z), принадлежащие направляющей (60):  где X, Y, Z - текущие координаты точек образующих.
где X, Y, Z - текущие координаты точек образующих. , при этом x называют аргументом функции, y называют значением функции.
, при этом x называют аргументом функции, y называют значением функции. .
. . Здесь значению x = 1 соответствует
. Здесь значению x = 1 соответствует  , значению x = 3 соответствует
, значению x = 3 соответствует  и т. д.
и т. д.
 то говорят, что задана числовая последовательность
то говорят, что задана числовая последовательность  Кратко она обозначается символом
Кратко она обозначается символом 
 называют n-м членом последовательности. Совокупность этих чисел называют множеством значений последовательности.
называют n-м членом последовательности. Совокупность этих чисел называют множеством значений последовательности.
 При этом пишут, что
При этом пишут, что  или
или  при n → ∞. Кратко это определение можно записать так:
при n → ∞. Кратко это определение можно записать так: 
 если для любого
если для любого  > 0 найдётся такое положительное число
> 0 найдётся такое положительное число  =
= 
 при условии существования предела
при условии существования предела  .
.

 при условии существования предела
при условии существования предела .
. при условии существования пределов
при условии существования пределов


 ), то наклонной асимптоты при
), то наклонной асимптоты при  (или
(или  ) не существует.
) не существует. : f ( x0 ) и f ( x0 +
: f ( x0 ) и f ( x0 + 


 где
где  - угол наклона секущей AB.Таким образом, разностное отношение равно угловому коэффициенту секущей. Если зафиксировать точку A и двигать по направлению к ней точку B, то
- угол наклона секущей AB.Таким образом, разностное отношение равно угловому коэффициенту секущей. Если зафиксировать точку A и двигать по направлению к ней точку B, то