
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Синтез СРП с дискретным по пространству и времени управляющим устройством
В отличие от рассмотренных ранее, рассмотрим распределенную систему, регулятор которой реализует дискретное управляющее воздействие по пространству в виде совокупности скачкообразных функций, которые будем называть импульсами. Рассмотрим в качестве ОУ – цилиндрический стержень, математическая модель которого имеет вид:
Рис. 1. Цилиндрический стержень.
Управляющее воздействие реализуется в виде управляющих импульсов. Граничные условия:
Рис. 2. Последовательность импульсов. Отметим, что
Начальные условия:
Ставится следующая задача управления: на заданном радиусе
В рассматриваемой системе воздействия задаются в виде импульсов. Будем считать, что импульсы имеют одинаковую длину
Порядковый номер управляющего импульса обозначим как Обозначим также через
Здесь
Рис. 3. Управляющие импульсы. Так как разложение осуществляется по sin, делаем нечетно-симметрическое дополнение:
Амплитудное значение гармоники управления от Запишем амплитудное значение гармоники управления.
Или
где
Коэффициенты матрицы Было проведено исследование для случая, когда Будем полагать, что измерения в системе проводятся в каждой секции и в этом случае рассогласования будет представлено в виде.
Здесь
Дискретные значения рассогласования по пространству могут быть реализованы в амплитуды гармонических составляющих
Где
Представим с учетом принятых условий интеграл для
Уравнение (13) может быть представлено в векторно-матричной форме
Рис. 4. Структурная схема рассматриваемой системы. С помощью матричного преобразования Ф осуществим переход от рассогласования в отдельных точках пространства к представлению рассогласования в виде пространственных мод. На схеме (рис. 18) изображено:
Учитывая данную структуру, можно построить передаточную функцию разомкнутой системы управления. ПИД – регулятор может быть сформирован на основе следующего алгоритма:
Здесь
Рис. 5. Структурная схема системы. БТ – блок термопар; БХК – блок холодных концов термопар; БТУ – блок тиристорных усилителей; УТ – усилитель термопар. Аргумент
Таким образом, распределенный сигнал
где
Приведенная дискретная система по времени и пространству дает возможность изменять управляющее воздействие на объект в процессе управления.
6.2 Презентация лекций по курсу «Распределенные системы автоматического управления» Презентация лекции № 1 Введение, основные понятия и определения в СРП
Определение: Системы, регулируемые параметры которых зависят не только от времени, но и от пространственных переменных (или от переменных какой-либо другой природы), называются системами с распределенными параметрами. Это системы управления тепловыми, диффузионными, радиационными процессами, это длинные линии в энергетике, упругие конструкции. Отличительной особенностью распределенных систем является то, что управление объектом может осуществляться двумя путями: 3) каждый распределенный объект имеет границы – через них и осуществляется управление; 4) управление может осуществляться за счет внутренних источников.
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 349; Нарушение авторского права страницы

 , (1)
, (1) .
. . (2)
. (2)
 - не означает сумму, а означает последовательность.
- не означает сумму, а означает последовательность. . (3)
. (3) . (4)
. (4) . (5)
. (5) необходимо выдержать заданное значение температуры:
необходимо выдержать заданное значение температуры:  . (6)
. (6) , число их -
, число их -  .
. . (7)
. (7) .
. - температуру
- температуру  -ого импульса. Разложим каждый
-ого импульса. Разложим каждый  и возьмем ограниченное число мод:
и возьмем ограниченное число мод:  . (8)
. (8) - круговая частота;
- круговая частота;  - коэффициент ряда Фурье.
- коэффициент ряда Фурье.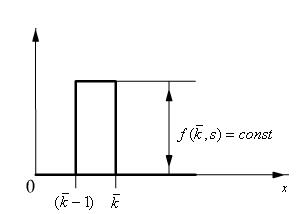
 (9)
(9) управляющих импульсов может быть найдено, как сумма амплитудных значений пространственных гармоник данной частоты от каждого из
управляющих импульсов может быть найдено, как сумма амплитудных значений пространственных гармоник данной частоты от каждого из  . (10)
. (10) , (11)
, (11) - вектор амплитуд
- вектор амплитуд  -ой гармоники управления;
-ой гармоники управления;  - вектор амплитуд управляющих импульсов;
- вектор амплитуд управляющих импульсов;  -
-  матрица преобразования.
матрица преобразования. . (11’)
. (11’) .
. , причем
, причем  . (12)
. (12) -
-  вектор рассогласования;
вектор рассогласования;  вектор входных воздействий;
вектор входных воздействий;  вектор текущих значений температур.
вектор текущих значений температур. . Для чего рассмотрим разложение непрерывного в пространстве и времени
. Для чего рассмотрим разложение непрерывного в пространстве и времени  на том же интервале
на том же интервале  .
. .
.
 .
. . (13)
. (13) . (14)
. (14)
 - регулятор: в каждой диагонали может стоять любой закон управления (ПИД - регулятор).
- регулятор: в каждой диагонали может стоять любой закон управления (ПИД - регулятор). - вектор амплитуд гармоник управления;
- вектор амплитуд гармоник управления;  - уравнение работы регулятора;
- уравнение работы регулятора;  - элемент, дающий возможность преобразовать сигнал в отдельных точках пространства.
- элемент, дающий возможность преобразовать сигнал в отдельных точках пространства. . (15)
. (15) - коэффициент пропорциональности по рассогласованию для
- коэффициент пропорциональности по рассогласованию для  - коэффициент пропорциональности по интегралу от рассогласования для
- коэффициент пропорциональности по интегралу от рассогласования для  - интервал дискретизации по времени;
- интервал дискретизации по времени;  - номер временного интервала;
- номер временного интервала; 
 принимает значения из некоторого подмножества
принимает значения из некоторого подмножества  , иными словами
, иными словами или
или  .
. считается определенным на прямом произведении множеств
считается определенным на прямом произведении множеств  .
. ,
,  - пространственная размерность сигнала.
- пространственная размерность сигнала.