
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
По степени сложности физические задачи делятся на элементарные, стандартные и нестандартные.Стр 1 из 13Следующая ⇒
УИПКПРО, 2010 – 43 с. Учебно-методическое пособие предназначено для учителей физики, работающих в старших классах средних общеобразовательных учреждениях и готовящих учащихся к ЕГЭ. Здесь описаны основные методы, использующиеся при решении многих физических задач. Каждый из методов рассмотрен на примерах решения конкретных физических задач. Печатается по решению учебно-методического совета Ульяновского института повышения квалификации и переподготовки работников образования. Ульяновский институт повышения квалификации и переподготовки работников образования, 2010 Ю.Н. Кудрявцев, 2010 Введение. «Задача – это необходимость сознательного поиска соответствующего средства для достижения некоторой цели». Д. Пойа. Физическая задача - это проблема, решаемая с помощью логических умозаключений, математических действий на основе законов и методов физики. Решение физических задач относится к практическим методам обучения и, опираясь на активную мыслительную деятельность ученика, выполняет образовательную, воспитательную и развивающую функции. Физический смысл различных определений, правил, законов становится понятным учащимся лишь после многократного применения их к конкретным частным примерам – задачам. Воспитательная функция физических задач заключается в формировании научного мировоззрения учащихся. Решение задач воспитывает трудолюбие, самостоятельность в суждениях, интерес к учению, упорство в достижении поставленной цели. При решении задач развиваются логическое и творческое мышление. Общая структура деятельности по решению задачи.
Решение задачи начинается с анализа условия . Ученик должен не только запомнить условие, но и осознать его, увидев физическое явление, о котором говорится в задаче. На этапе поиска решения ученик вспоминает физические законы, определения, описывающие рассматриваемое в задаче физическое явление, строит его математическую модель. Основным методом поиска решения задачи является аналитико-синтетический способ. Аналитические рассуждения направлены от искомых задачи к её данным. Анализ требует разделения целого на части. При синтезе двигаются в рассуждениях от данных задачи к искомым. Синтез объединяет отдельные элементы в целое. На этапе решения производятся преобразования записанных формул, осуществляется намеченный план решения. Здесь проявляется математическая подготовка учащихся. Проверка результата заключается в определении достоверности числового значения искомой величины или её размерности при отсутствии числовых данных. Исследование решения является очень важным этапом, имеющим большие дидактические возможности, позволяющим глубже проанализировать физическое явление. Никакую задачу нельзя исчерпать до конца, поскольку всегда остаётся что-то, над чем можно поразмышлять, найти другое решение задачи. Из уравнения (1.1) можно получить уравнение для проекции на ось Х вектора скорости как функции времени путём дифференцирования (1.1) по времени. Vх = dx/dt = V0х + ахt. (1.3) Умение составлять уравнения (1.1) и (1.3) и является одним из главных умений, необходимых для решения кинематических задач. Записываем уравнения движения тел. Для тела А: ХА = L; (1.21) УА = Н - gt2/ 2. (1.22) Для тела В: Хв = ( V0 cos α) t; (1.23) Ув = ( V 0 sin α) t – gt 2 /2. (1.24) При столкновении ХА = Хв; УА = Ув, приравняв правые части (1.21) и (1.23), а также (1.22) и (1.24) получим уравнения: L = ( V0 cos α) t; (1.25) Н - gt2/ 2 = ( V0 sinα) t – gt2/2 или Н = ( V0 sinα) t. (1.26) Откуда время качения tk = 2 (V0sinα) / (g sinβ). (1.34) Как видно из (1.34) время качения шарика при одинаковых начальных скоростях V0 будет тем больше, чем меньше угол β наклона плоскости ХОУ к Горизонтальной плоскости. Задача № 4. Шарик, падая вертикально, отскакивает от абсолютно твёрдой наклонной плоскости, расположенной под углом α к горизонту, со скоростью V0. Определить на каком расстоянии от точки падения шарик снова упадёт на наклонную плоскость.
на рис. 5 (ось ОХ вдоль наклонной плоско- Где q - заряд шарика. Приравняв правые части (1.64) и (1.65) получим уравнение, из которого можно найти заряд шарика: U q / ε d = (mg – FA) tg α. (1.66) Подставим в уравнение (1.66) выражения для силы тяжести и силы Архимеда, связав их с плотностями алюминия и керосина, соответственно: mg = ρa Vg = (4/3) π r 3 ρag , (1.67) FA = ρk Vg = (4/3) π r 3 ρkg . (1.68) Получим уравнение U q / ε d = (4/3) π r 3 g ( ρa - ρk ) tg α , (1.69) В случае произвольной (несходящейся) плоской системы сил, кроме равенства нулю сумм проекций сил на координатные оси ОХ и ОУ требуется равенство нулю суммы моментов сил относительно оси, перпендикулярной плоскости чертежа и проходящей через произвольную точку. Моментом силы относительно оси называют скалярную величину, определяемую произведением модуля силы на плечо силы. Плечом силы называют кратчайшее расстояние между осью вращения и линией действия силы. Если под действием силы тело вращается вокруг оси против направления движения часовой стрелки, то момент такой силы считается положительным, если по часовой – отрицательным. Задача № 10.Лестница массой m прислонена к стене. Чему равен минимальный угол φ между лестницей и полом, при котором лестница ещё находится в равновесии, если коэффициент трения между лестницей и стеной равен μ1, а между лестницей и полом μ2? Определить силы реакции стены и пола, а также силы трения между лестницей и полом, лестницей и стеной. Лестницу считаем телом однородным по всей длине, поэтому С - точка приложения силы тяжести mg лежит в середине лестницы АВ (рис. 11). На лестницу в точке А действуют сила трения F ТР1 и сила реакции стены N 1 , в точке В – сила трения F ТР2 и сила реакции пола N 2 (рис. 11).
ОХ: N 1 - F ТР2 = 0; (1.56) ОУ: F ТР1 + N 2 – mg = 0; (1.57) Рис. 11. В качестве моментной точки выберем точку В, тогда сумма моментов относительно оси, проходящей через эту точку, предстанет в виде: F ТР1 L cos φ + N 1 L sin φ - ( mgL /2) cos φ = 0. (1.58) В этом случае моменты сил F ТР2 и N 2 равны нулю, так как равны нулю их плечи. Следует учесть, что F ТР1 = μ1 N 1 , а F ТР2 = μ2 N 2 , тогда уравнения (1.56) -(1.58) примут вид: N 1 - μ2 N 2 = 0; μ 1 N1 + N2 – mg = 0; μ 1 N1 cos φ + N1 sin φ - (mg/2) cos φ = 0. (1.59) Переход в систему отсчета, связанную с одним из движущихся тел, заключается в том, что это тело в его системе отсчёта становится неподвижным, а его скорость и ускорение, направленные противоположно, передаются второму телу. Пусть в неподвижной системе отсчёта два тела А и В имеют скорости VA и VB, векторы которых направлены как показано на рис. 12,а.
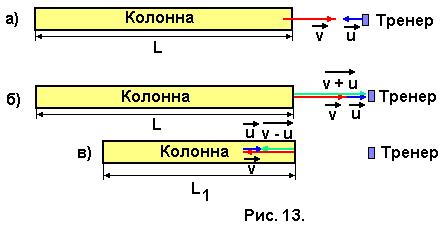
Скорость VBA тела В в системе отсчёта, связанной с телом А, определится как векторная сумма векторов VB и ( -VA ), а скорость тела А в этой системе становится нулевой (рис. 12,б). Задача № 11. Спортсмены бегут колонной длины L со скоростью v . Навстречу бежит тренер со скоростью u , причём u < v (рис. 13,а). Каждый спортсмен, поравнявшись с тренером, разворачивается и начинает бежать назад с той же по модулю скоростью v . Какова будет длина колонны, когда все спортсмены развернуться.
Задачу решаем в системе отсчёта, связанной с тренером. В этой системе отсчёта тренер неподвижен, а спортсмены при беге навстречу тренеру имеют скорость равную сумме скоростей ( v + u ) (рис. 13,б), а при беге от тренера ( v – u ) (рис.13,в). Время, за которое все спортсмены, поравнявшись с тренером, повернут назад равно t = L / ( v + u ). (2.1) Этот метод используется при решении тех задач, в которых рассматривается одно и то же физическое явление, происходящее при разных условиях, отражённых в данных задачи. При составлении уравнений необходимо проанализировать, какие физические величины, описывающие это явление, остаются одинаковыми. Задача № 13. Эскалатор (движущаяся лестница) спускает идущего по нему пассажира за время t1, а движущегося по нему в два раза быстрее за время t2. За какое время эскалатор спускает стоящего на нём пассажира?
В этой задаче одинаковыми являются длина эскалатора S и скорость его движения u. Скорость первого пассажира в неподвижной системе отсчёта по закону сложения скоростей складывается из скорости пассажира относительно эскалатора v и скорости самого эскалатора u: v1 = v + u, её также можно определить по определению скорости v1 = S/t1. Тогда для скорости движения первого пассажира получим соотношение: S/t1 = v +u. (3.1) Аналогично для скорости движения второго пассажира, который движется относительно эскалатора со скоростью 2v: S/t2 = 2v + u. (3.2) Для третьего пассажира уравнение скорости движения будет иметь вид: S/t3 = u. (3.3) В системе трёх уравнений (3.1) – (3.3) четыре неизвестных: S, v, u и искомое t3, поэтому необходимо понизить число неизвестных. Для исключения неизвестной скорости v, вычтем уравнение (3.2) из уравнения (3.1), умноженного на 2. В результате чего получим уравнение: S (2/t1 – 1/t2) = u. (3.4) Далее решаем систему уравнений (3.3) и (3.4). Приравняв левые части этих равенств, и сократив на S, получим выражение: 2/ t1 – 1/ t2 = 1/ t3. (3.5) Откуда t3 = t1t2 / (2t2 – t1). (3.6)
Задача № 14. Посередине откачанной и запаянной с обоих концов трубки длиной L, расположенной горизонтально, находится столбик ртути длиной h. Если трубку поставить вертикально, то столбик ртути сместится на расстояние равное d. До какого давления была откачана трубка? Плотность ртути ρ. Процесс перевода трубки из горизонтального положения в вертикальное (рис. 16) можно считать изотермическим, и, следовательно, к состояниям газа в обеих частях трубки применить закон Бойля-Мариотта.
Р(L – h)/2 = P1 [(L- h)/2 + d]; (3.7) При параллельном соединении С02 = С1 + С2 + С3. (3.11) Имеем систему двух уравнений с неизвестными С2 и С3. Из уравнения (3.10) выразим С3: С3 = С01С1С2 / (С1С2 – С01С2 – С01С1) (3.12) и подставим в уравнение (3.11). Проведя преобразования, получим квадратное уравнение относительно неизвестного С2: (С1 – С01) С22 + ( С12 – С01С1 – С02С1 + С01С02) С2 + (С01С02 – С01С1)С1 = 0. (3.14) Подставив в уравнение (3.14) значения электроёмкостей в микрофарадах, получим уравнение с числовыми коэффициентами: С22 – 4С2 + 4 = 0. (3.15) Решение этого уравнения даёт единственное значение С2 = 2 мкФ. Из уравнения (3.12) определяем С3 = 2 мкФ. Метод отрицательных масс. Этот метод используется при решении задач на определение положения центра масс фигуры, имеющей удалённые из неё участки. В этом случае массу удалённого участка считают отрицательной, а силу тяжести этого участка (-mg) направляют вверх. В дальнейшем используют условие равновесия тела, находящегося под действием системы параллельных сил. Здесь используется понятие момента силы. Задача №31. Определить координату ХС центра масс однородного цилиндра радиуса R, в котором высверлено сквозное цилиндрическое отверстие радиуса r, ось которого параллельна оси цилиндра и находится от неё на расстоянии d.
Изобразим поперечное сечение цилиндра с высверленным в нём цилиндрическим отверстием. Сечение проводим через середину длины цилиндра. Центр масс (точка С) (рис. 31) находится на оси Х, проходящей через Mg XC - mg(d + XC) = 0. (6.1) Массы М и m определим по формулам: М = ρ V = ρ πR2L; m = ρ π r2L, (6.2) где ρ – плотность материала цилиндра, L – длина цилиндра. После подстановки (6.2) в (6.1) и преобразований получаем выражение: R2 XC - r2(d – XC) = 0, (6.3) Откуда получаем значение координаты центра масс ХС: ХС = d [r2/ (R2 + r2)]. (6.4)
Поскольку плотность свинца больше плотности алюминия, то центр масс (точка С) такого цилиндра сместится влево от оси основного цилиндра. Масса высверленного алюминиевого цилиндра m1 считается отрицательной, поэтому сила тяжести (-m1g) направлена вверх, а сила тяжести заполняющего это отверстие свинца m2g направлена, как обычно, вниз (рис. 32). Массы М, m1 и m2 определим по формулам: М = ρAl πR2L; m1 = ρAl πr2L; m2 = ρPb πr2L. (6.5) Уравнение равновесия цилиндра относительно оси, проходящей через центр масс, будет иметь вид: m2g(d – XC) - m1g (d – XC ) - Mg XC = 0. (6.6) После подстановки значений М, m1 и m2 из (6.5) в (6.6) и преобразований получим выражение, определяющее координату центра масс данного цилиндра: XC = dr2 ( ρPb - ρAl)/[ ρAl(R2- r 2) + ρPbr 2]. (6.7)
Метод индукции. Этот метод подобен методу математической индукции, с помощью которого устанавливается общая зависимость некоторых величин по их частным зависимостям. Задача № 33. Гоночный автомобиль («болид») движется равноускоренно из состояния покоя. На первых десяти метрах его скорость возрастает на 10 м/с. Определить возрастание его скорости на тех же десяти метрах при прохождении от 990-го метра до 1000-го метра пути и сравнить с возрастанием на первых десяти метрах. Дать объяснение их значительному расхождению. При решении задачи используем соотношение между изменением скорости и пройденным путём: V2 - V02 = 2aS. (7.1) Скорость автомобиля после прохождения первого десятиметрового отрезка ( S = 10 м) определится соотношением: V12 = V02 + 2aS = 0 + 2aS = 2aS; ( 7.2) после прохождения второго: V22 = V12 + 2aS = 2aS +2aS = 4aS = 2V12; ( 7.3) после прохождения третьего: V32 = V22 + 2aS = 4aS + 2aS = 6aS = 3V12 ; ( 7.4) Следовательно, между обеими частями равенств (7.2) - (7.4) просматривается зависимость вида: Vn2 = n V12, ( 7.5) откуда связь между скоростью при прохождении n-го десятиметрового отрезка и первого выразится соотношением: Vn = ( n)1/2 V1 . (7.6) Откуда n = lg (Pn/ P0) / lg [V / (V + Δ V )]. (7.16) При достижении в откачиваемом объёме давления равного давлению в рабочей камере насоса (10 -3 – 10 -4 мм рт.ст.) процесс откачки прекращается и насос лишь поддерживает достигнутый вакуум. Задача №35. На рис. 34 изображена система связанных грузов одинаковой массы m. Определить ускорение, с которым движется система, и силы натяжения нитей, связывающих грузы. Трением между горизонтальной поверхностью и грузами, расположенными на ней, пренебречь.
mg – T3 = ma; T3 - T2 = ma; (7.17) T2 - T1 = ma; T 1 = ma . Сложив левые и правые части равенств системы четырёх уравнений (7.17), получим уравнение: mg = 4 ma, откуда a = g / 4 . (7.18) Анализируя уравнения (7.18) и (7.19), можно записать уравнения для ускорения и сил натяжения нитей в случае системы, состоящей из n одинаковых грузов, приводимой в движение силой тяжести одного из них. a = g / n; Tk = k (mg / n), (7.20) Линейные бесконечные цепи, как правило, симметричны и во многих случаях содержат одинаковые повторяющиеся элементы, состоящие из резисторов. Расчёт сводится к определению эквивалентного сопротивления, равного сопротивлению всей цепи. Задача № 36.Найдите эквивалентное сопротивление бесконечной цепи (рис. 35), которая состоит из одинаковых резисторов сопротивлением R каждый.
Для определения эквивалентного сопротивления цепи выделим общий элемент, который бесконечно повторяется. Очевидно, что если отделить его от цепи, то общее сопротивление цепи не изменится, т.к. число таких элементов бесконечно. Выделив повторяющийся элемент цепи и заменив сопротивление остальной цепи искомым сопротивлением RX , получим RX = 2 R + RRX / ( R + RX ), (8.1) Или RX 2 – 2 RRX – 2 R 2 = 0. (8.2) Или RX 2 + 2 RRX – 2 R 2 = 0. (8.4) Решив это квадратное уравнение, получим значение эквивалентного сопротивления данной бесконечной цепи: RX = R (31/2 - 1). (8.5)
Эквивалентное сопротивление цепи равно сопротивлению четырёх резисторов, соединённых между собой в цепь, изображённую на рис. 42. Сопротивления R 0 одинаковы и равны R 0 = R (31/2 - 1) (8.6) (смотри решение задачи № 37 ). Тогда эквивалентное сопротивление между точками А и В будет равно: RAB = (2 R 0 + R ) R / (2 R 0 + R ) + R . (8.7) Подставив значение R 0 из (8.4) и произведя преобразования, получим RAB = R (6 – 31/2)/6. Расчёт эквивалентного сопротивления цепи АВ начинаем слева. Эквивалентное сопротивление участка цепи АС равно R , т. к. здесь включены параллельно два одинаковых сопротивления 2 R . Участок АС соединён последовательно с сопротивлением R . Сопротивление верхней ветви участка А D равно 2 R . Т.к. эта ветвь параллельна сопротивлению 2 R , то общее сопротивление участка цепи А D равно R . Участок цепи AD соединён последовательно с участком DB , сопротивление которого равно R , поэтому эквивалентное сопротивление верхней ветви цепи АВ равно 2 R . Поскольку это сопротивление параллельно сопротивлению 2 R нижней ветви цепи АВ, то общее сопротивление цепи АВ равно R . Откуда R общ = R 1 R 2 R 3 /( R 1 R 2 + R 2 R 3 + R 1 R 3 ). (8.12) Задача № 42. Найти сопротивление цепи, изображённой на рис.43,а, если сопротивления всех резисторов одинаковы и равны R . Потенциалы точек 1 и 3 одинаковы, поэтому их можно объединить в одну, то же самое можно сделать с точками 2 и 5, 4 и 6. В результате получится видоизменённая упрощённая схема (рис. 43,б).
Метод разделения узлов . Метод разделения узлов схемы основан на том, что, если возможно объединение двух узлов, имеющих равные потенциалы, то возможен и обратный переход: узел схемы можно разделить на две или несколько точек, если получившиеся при этом точки имеют прежние одинаковые потенциалы. Задача № 43. Найти сопротивление цепи, которая представляет собой каркас из одинаковых отрезков проволоки (рис.44) сопротивлением R каждый.
Задача № 44.Найти сопротивление цепи, которая представляет собой каркас из одинаковых отрезков проволоки (рис. 46,а) сопротивлением R каждый. Единственно верным способом разделения узла О на отдельные точки О1, О2 и О3 является способ, изображённый на рис. 46,б. Эквивалентное сопротивление участков ( cd ) и ( ef ) будет равно Rcd = Ref = 2R R/ (2R + R) =2R/3. (8.13)
1/ R общ = 3/8R + 3/8R + 1/2R = 5/4R, (8.14) откуда R общ = 4R/5. 8.5. Метод преобразования и расчёта цепей с помощью перехода «звезда» - «треугольник». Этот метод основан на том, что схему, имеющую три узла, можно заменить другой, с тем же числом узлов. При этом сопротивление участка между двумя любыми узлами новой схемы должно быть равно сопротивлению заменяемого участка. В результате получается схема, сопротивление которой эквивалентно сопротивлению данной по условию. Поскольку в результате такого преобразования изменяются токи внутри цепи, то такую замену проводят в тех случаях, когда не нужно находить распределение токов.
Рассмотрим преобразование схем, имеющих три вывода (трёхполюсников). Это преобразование называется преобразованием «звезды» (рис. 47,а) в «треугольник» (рис. 47,б), и наоборот. В «звезде» сопротивление между точками 1 и 2 равно r 1 + r 2 , в «треугольнике» R 12 ( R 13 + R 23 )/( R 12 + R 13 + R 23 ). Следовательно, для того чтобы сопротивления между точками 1 и 2 были одинаковы для обеих схем, необходимо выполнение равенства: r 1 + r 2 = R 12 ( R 13 + R 23 )/( R 12 + R 13 + R 23 ). (8.15) Аналогично для точек 1 и 3 и для точек 2 и 3: r 1 + r 3 = R 13 ( R 12 + R 23 )/( R 12 + R 13 + R 23 ). (8.16) r 2 + r 3 = R 23 ( R 12 + R 13 )/( R 12 + R 13 + R 23 ). (8.17) Сложив левые и правые части этих уравнений и разделив полученные суммы на 2, получим: r1 + r2 + r3 = (R12 R13 + R12 R23 + R13 R23)/ )/(R12 + R13 + R23). (8.18) Вычитая из (8.18) поочерёдно уравнения (8.17), (8.16) и (8.15), получим: r 1 = R 12 R 13 / ( R 12 + R 13 + R 23 ); (8.19) r2 = R12 R23/ (R12 + R13 + R23); (8.20) r3 = R13 R23/ (R12 + R13 + R23). (8.21) Эти выражения легко запомнить: знаменатель в каждой формуле есть сумма сопротивлений всех резисторов «треугольника», а в числителе дважды повторяется индекс, стоящий слева: r 1 - R 12 R 13 ; r 2 - R 12 R 23 ; r 3 - R 13 R 23 . Аналогично получаются формулы для обратного преобразования: R 12 = ( r 1 r 2 + r 1 r 3 + r 2 r 3 ) / r 3 ; (8.22) R 13 = ( r 1 r 2 + r 1 r 3 + r 2 r 3 ) / r 2 ; (8.23) R 23 = ( r 1 r 2 + r 1 r 3 + r 2 r 3 ) / r 1 . (8.24) Выражения (8.22) – (8.24) также легко запомнить: числитель у всех выражений один и тот же, а у сопротивления, стоящего в знаменателе, стоит тот индекс, которого не достаёт у сопротивления, стоящего в левой части выражения. Задача № 45.Определите сопротивление цепи АВ (рис. 48.а), если R 1 = R 5 =
3 O м; R 4 = R 8 = 4 O м . Преобразуем «треугольники» R 1 R 2 R 8 R 4 R 5 R 6 в эквивалентные «звёзды», тогда схема примет вид, изображённый на рис. 48,б. Сопротивления r 1, r 2, r 3 , … r 6 рассчитаем по формулам: r 1 = R 1 R 8 / ( R 1 + R 2 + R 8 ) = 4/7 Ом;
r 2 = R 1 R 2 / ( R 1 + R 2 + R 8 ) = 2/7 Ом; r 3 = R 2 R 8 / ( R 1 + R 2 + R 8 ) = 8/7 Ом; r 4 = R 4 R 6 / ( R 4 + R 5 + R 6 ) = 8/7 Ом; r 5 = R 5 R 6 / ( R 4 + R 5 + R 6 ) = 2/7 Ом;
Схема, изображённая на рис. 48,в является эквивалентной схеме на рис. 48,б. Здесь R ’3 = r 2 + R 3 + r 4 = 31/7 Ом; R ’7 = r 3 + R 7 + r 5 = 31/7 Ом, R ’3 = R ’7. Общее сопротивление цепи R общ = r 1 + R ’3/2 + r 6 = 47/14 Ом. Задача № 46. Определить общее сопротивление неуравновешенного моста (рис. 49,а) , если R 1 = 1,0 O м; R 2 = 1,6 O м; R 3 = 2,0 O м; R 4 = 1,2 O м; R 5 = 2,0 O м.
Если преобразовать «треугольник» из резисторов R 1 , R 3 , R 5 в эквивалентную «звезду», то получится простая схема (рис. 49,б). Рассчитаем сопротивления r 1 , r 2 и r 3 по формулам: r 1 = R 1 R 3 /( R 1 + R 3 + R 5 ) = 0,4 Ом; r 2 = R 1 R 5 /( R 1 + R 3 + R 5 ) = 0,4 Ом; r 3 = R 3 R 5 /( R 1 + R 3 + R 5 ) = 0,8 Ом; Общее сопротивление цепи R общ = r 1 + ( r 2 + R 2 ) ( r 3 + R 4 )/ ( r 2 + R 2 + r 3 + R 4 ) = 1,4 Ом. Задача № 47. Мальчик и девочка решили попасть из пункта А в пункт В, расположенные на противоположных берегах реки, скорость течения которой u . Мальчик плывёт так, чтобы сразу оказаться в пункте В. Девочка направляет скорость своего плавания поперёк скорости течения реки и, чтобы попасть в пункт В, должна пройти по противоположному берегу то расстояние, на которое её снесёт течением. С какой скоростью должна перемещаться девочка по берегу, чтобы оказаться в пункте В одновременно с мальчиком? Скорости и мальчика, и девочки относительно воды одинаковы и равны V . При решении используем закон сложения скоростей, согласно которому скорость тела относительно неподвижной системы отсчёта равна сумме скорости относительно подвижной системы и скорости самой подвижной системы. На рис. 50,а показана скорость мальчика V 1 относительно берегов, которая получается путём сложения скорости мальчика относительно воды V и скорости течения реки u . Модуль скорости V 1 определим по теореме Пифагора: V 1 = ( V 2 – u 2 ) 1/2. (9.1) Время, за которое мальчик сумеет переплыть реку по прямой АВ, определим по формуле: t 1 = L / V 1 , (9.2) Где L – ширина реки. На рис. 50,б показана скорость девочки V 2 относительно берегов реки, которая также равна сумме векторов скоростей девочки относительно воды V и течения реки u . Однако по модулю она равна V 2 = ( V 2 + u 2 )1/2. (9.3)
Время, которое потребуется девочке, чтобы переплыть реку по прямой АС равно: t 2 = L / V , (9.4) т.к. вдоль прямой АВ она плывёт со скоростью V . Поскольку V > V 1 , то t 2 < t 1 на величину Δ t = t 1 - t 2 = L (1/ V 1 – 1/ V ). (9.5) Решение: Путь - ? Путь – длина траектории. Траектория – окружность радиуса R . Период вращения – время одного оборота винта вокруг своей оси. За один оборот крайняя точка винта опишет длину окружности L = 2π R . Примеры решения задач в свёрнутом виде. Задача №1 . С высоты 5 м бросают вертикально вверх тело массой 200 г с начальной скоростью 2 м/с. Какую скорость будет иметь тело при падении на землю? Сопротивлением воздуха пренебречь. Ответ запишите с точностью до 0,1. Решение: Элективный курс «Методы решения физических задач» Программа элективного курса разрабатывается учителем, согласовывается с преподавателем кафедры ФМО УИПКПРО, утверждается директором ОУ и реализуется образовательным учреждением. Возможно также использование готовых программ элективных курсов из всевозможных информационных источников при согласовании с преподавателями кафедры ФМО. Базовыми требованиями к содержанию программ элективных курсов являются следующие: 1) ориентация на современные образовательные технологии; Предлагаем примерную расчасовку курса, рассчитанного на 34 часа.
Список литературы 1. Бутиков Е.И. Физика в примерах и задачах. Изд. 3-е исправленное и дополненное /Е.И. Бутиков, А.А. Быков, А.С. Кондратьев. – М.:МЦНМО, Петролиф. 2008. – 516 с. 2. Бутиков Е.И. Физика для поступающих в вузы. / Е.И. Бутиков, А.А. Быков, А.С. Кондратьев. – М.: Мир и образование, 2004. – 637с. Содержание Стр. Введение…………………………………………………………………………….. 3 § 1. Координатный метод решения задач .............................................................. 4 1.1. Решение кинематических задач координатным методом................ 4 1.2. Решение задач по динамике координатным методом....................... 10 1.3. Применение координатного метода к статическим задачам.......... 11 § 2. Метод решения задач переходом в систему отсчёта, связанную с одним из движущихся тел............................................................ 14 § 3. Метод составления системы уравнений........................................................ 16 3.1. Система идентичных уравнений ..................................................................... 16 3.2. Система уравнений законов сохранения ...................................................... 19 § 4. Метод решения задач, заданных графическим способом....................... 21 § 5. Графический метод решения физических задач......................................... 26 § 6. Метод отрицательных масс ................................................................................ 30 § 7. Метод индукции........................................................................................................ 31 § 8. Методы расчёта резисторных схем постоянного тока............................. 34 УИПКПРО, 2010 – 43 с. Учебно-методическое пособие предназначено для учителей физики, работающих в старших классах средних общеобразовательных учреждениях и готовящих учащихся к ЕГЭ. Здесь описаны основные методы, использующиеся при решении многих физических задач. Каждый из методов рассмотрен на примерах решения конкретных физических задач. Печатается по решению учебно-методического совета Ульяновского института повышения квалификации и переподготовки работников образования. Ульяновский институт повышения квалификации и переподготовки работников образования, 2010 Ю.Н. Кудрявцев, 2010 Введение. «Задача – это необходимость сознательного поиска соответствующего средства для достижения некоторой цели». Д. Пойа. Физическая задача - это проблема, решаемая с помощью логических умозаключений, математических действий на основе законов и методов физики. Решение физических задач относится к практическим методам обучения и, опираясь на активную мыслительную деятельность ученика, выполняет образовательную, воспитательную и развивающую функции. Физический смысл различных определений, правил, законов становится понятным учащимся лишь после многократного применения их к конкретным частным примерам – задачам. Воспитательная функция физических задач заключается в формировании научного мировоззрения учащихся. Решение задач воспитывает трудолюбие, самостоятельность в суждениях, интерес к учению, упорство в достижении поставленной цели. При решении задач развиваются логическое и творческое мышление. Общая структура деятельности по решению задачи.
Решение задачи начинается с анализа условия . Ученик должен не только запомнить условие, но и осознать его, увидев физическое явление, о котором говорится в задаче. На этапе поиска решения ученик вспоминает физические законы, определения, описывающие рассматриваемое в задаче физическое явление, строит его математическую модель. Основным методом поиска решения задачи является аналитико-синтетический способ. Аналитические рассуждения направлены от искомых задачи к её данным. Анализ требует разделения целого на части. При синтезе двигаются в рассуждениях от данных задачи к искомым. Синтез объединяет отдельные элементы в целое. На этапе решения производятся преобразования записанных формул, осуществляется намеченный план решения. Здесь проявляется математическая подготовка учащихся. Проверка результата заключается в определении достоверности числового значения искомой величины или её размерности при отсутствии числовых данных. Исследование решения является очень важным этапом, имеющим большие дидактические возможности, позволяющим глубже проанализировать физическое явление. Никакую задачу нельзя исчерпать до конца, поскольку всегда остаётся что-то, над чем можно поразмышлять, найти другое решение задачи. По степени сложности физические задачи делятся на элементарные, стандартные и нестандартные. Для решения элементарной задачи необходимо и достаточно воспроизвести и применить один соответствующий физический закон. Решение стандартной задачи требует системы обычных знаний и стандартных методов и приёмов. Нестандартная задача требует особых методов решения, поскольку применение обычных законов и методов не приводит к цели, так как система уравнений получается незамкнутой. Как правило, нестандартные задачи встречаются в олимпиадных заданиях. В распространённых сборниках задач по физике приводятся стандартные задачи. Методике обучения учащихся решению задач посвящено значительное количество работ учёных, методистов, учителей – практиков [1, 2, 3, 4. 5]. Однако затруднения в решении задач по-прежнему остаются наиболее частыми затруднениями, которые испытывают учащиеся школ, особенно при решении задач части С заданий ЕГЭ. Анализ программ по физике, поурочного планирования учебного материала показывает, что о задачах говорится только в разделе «Требования к знаниям и умениям учащихся». Примерное поурочное планирование учебного материала предлагает примерно 20% учебного времени отводить на уроки по решению задач. Остальное время отводится на формирование у учащихся знаний о физических понятиях, законах, принципах, теориях, экспериментах. Возникает противоречие: большая часть времени уделяется изучению теоретического материала, а на контрольных работах проверяется умение решать задачи, чему практически не учат. Создаётся впечатление, что умение решать задачи является само собой разумеющимся, если знать теорию вопроса. Однако это умение не может возникнуть само собой, оно требует специального обучения. По мнению авторов [1, 2, 3] главная причина неумения решать задачи состоит в том, что учащихся не учат методам решения, которые для отдельных классов задач выражаются в виде алгоритмов или предписаний алгоритмического типа. Метод - (от греч. methodos - путь исследования), способ достижения какой-либо цели, решения конкретной задачи; совокупность приемов или операций практического или теоретического освоения (познания) действительности. Целью данного пособия является обзор методов решения задач, которыми должен владеть учитель физики, чтобы помочь учащимся подготовиться к итоговой аттестации в виде заданий ЕГЭ. Условия некоторых задач заимствованы из работ [ 6,7,8] и КИМ-ов ЕГЭ. §1. Координатный метод решения задач. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 257; Нарушение авторского права страницы

 При абсолютно упругом ударе шарика о наклонную плоскость угол отскока α от наклонной плоскости равен углу падения шарика на наклонную плоскость, т.к. составляющая скорости вдоль наклонной плоскости остаётся постоянной, а составляющая перпендикулярная наклонной плоскости меняет направление на противоположное, сохраняя свою величину. В данной задаче удобно направить оси координат так, как показано
При абсолютно упругом ударе шарика о наклонную плоскость угол отскока α от наклонной плоскости равен углу падения шарика на наклонную плоскость, т.к. составляющая скорости вдоль наклонной плоскости остаётся постоянной, а составляющая перпендикулярная наклонной плоскости меняет направление на противоположное, сохраняя свою величину. В данной задаче удобно направить оси координат так, как показано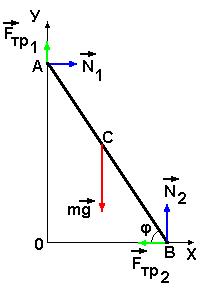 В данном случае имеет место плоская, произвольная система сил, поэтому условие равновесия лестницы будет представлено в виде трёх уравнений: равных нулю сумм проекций на координатные оси всех сил системы и равной нулю суммы моментов относительно оси, проходящей через точку А или В перпендикулярно плоскости чертежа. Выбор этих осей обусловлен тем, что в первом случае (точка А) «выбывают из игры» силы F ТР1 и N 1 , а во втором случае (точка В) – силы F ТР2 и N 2 , поскольку в этих случаях эти силы не имеют плеч и их моменты становятся равными нулю.
В данном случае имеет место плоская, произвольная система сил, поэтому условие равновесия лестницы будет представлено в виде трёх уравнений: равных нулю сумм проекций на координатные оси всех сил системы и равной нулю суммы моментов относительно оси, проходящей через точку А или В перпендикулярно плоскости чертежа. Выбор этих осей обусловлен тем, что в первом случае (точка А) «выбывают из игры» силы F ТР1 и N 1 , а во втором случае (точка В) – силы F ТР2 и N 2 , поскольку в этих случаях эти силы не имеют плеч и их моменты становятся равными нулю.
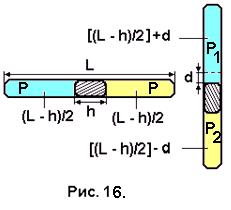 Поскольку площадь поперечного сечения трубки остаётся постоянной, то объёмы частей трубки, занятые газом, пропорциональны их длинам. Тогда для газа в верхней части трубки закон Бойля-Мариотта запишется так:
Поскольку площадь поперечного сечения трубки остаётся постоянной, то объёмы частей трубки, занятые газом, пропорциональны их длинам. Тогда для газа в верхней части трубки закон Бойля-Мариотта запишется так: точки О и О1. После удаления цилиндрической части радиуса r он смещается вправо от оси основного цилиндра. На рисунке указываем силы тяжестей сплошного цилиндра Mg и удалённого цилиндра (-mg). Под действием этих сил цилиндр остаётся в равновесии, если ось вращения проходит через центр масс. Условие равновесия тела, имеющего ось вращения заключается в равенстве нулю суммы моментов сил, приложенных к телу, относительно этой оси. Условие равновесия в нашем случае будет иметь вид:
точки О и О1. После удаления цилиндрической части радиуса r он смещается вправо от оси основного цилиндра. На рисунке указываем силы тяжестей сплошного цилиндра Mg и удалённого цилиндра (-mg). Под действием этих сил цилиндр остаётся в равновесии, если ось вращения проходит через центр масс. Условие равновесия тела, имеющего ось вращения заключается в равенстве нулю суммы моментов сил, приложенных к телу, относительно этой оси. Условие равновесия в нашем случае будет иметь вид: Задача № 32. Определить координату центра масс алюминиевого цилиндра радиуса R, в котором сквозное высверленное цилиндрическое отверстие радиуса r залито свинцом. Расстояние между осями алюминиевого цилиндра и заполненного отверстия d.
Задача № 32. Определить координату центра масс алюминиевого цилиндра радиуса R, в котором сквозное высверленное цилиндрическое отверстие радиуса r залито свинцом. Расстояние между осями алюминиевого цилиндра и заполненного отверстия d.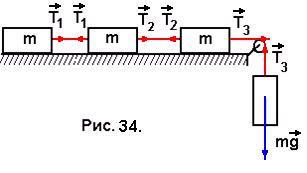 Поскольку все грузы связаны между собой, то они движутся с одинаковым ускорением. Запишем уравнения движения для каждого груза в отдельности:
Поскольку все грузы связаны между собой, то они движутся с одинаковым ускорением. Запишем уравнения движения для каждого груза в отдельности:
 эквивалентную схему (рис. 36), сопротивление которой определим по формуле
эквивалентную схему (рис. 36), сопротивление которой определим по формуле Задача № 38.Найдите эквивалентное сопротивление между точками А и В бесконечной цепочки (рис. 38,а) которая состоит из одинаковых резисторов сопротивлением R каждый.
Задача № 38.Найдите эквивалентное сопротивление между точками А и В бесконечной цепочки (рис. 38,а) которая состоит из одинаковых резисторов сопротивлением R каждый. Резисторы R 12 и R 23 соединены параллельно, следовательно, их общее сопротивление равно R /2. Точно также общее сопротивление резисторов R 45 и R 56 равно R /2. Общее сопротивление части цепи параллельной R 34 равно R /2 + R /2 = R , поэтому сопротивление всей цепи будет равно R /2.
Резисторы R 12 и R 23 соединены параллельно, следовательно, их общее сопротивление равно R /2. Точно также общее сопротивление резисторов R 45 и R 56 равно R /2. Общее сопротивление части цепи параллельной R 34 равно R /2 + R /2 = R , поэтому сопротивление всей цепи будет равно R /2.
 Разделим узел О на две точки, получив два варианта электрической цепи (рис. 45, а) и (рис. 45, б). В первом случае потенциалы точек О’ и О’’ не равны. , Если потенциал точки А больше потенциала точки В, то потенциал точки О’ больше потенциала точки О’’ и наоборот. Потенциалы же точек О1 и О2 равны, так как находятся в одинаковых условиях (полностью симметричны). Отсюда следует, что верным является разделение узла О, показанное на рис. 45, б. Эквивалентная схема цепи, полученная после разделения узла О, изображена на рис. 45, в. Отсюда общее сопротивление цепи между точками А и В равно 3 R /2.
Разделим узел О на две точки, получив два варианта электрической цепи (рис. 45, а) и (рис. 45, б). В первом случае потенциалы точек О’ и О’’ не равны. , Если потенциал точки А больше потенциала точки В, то потенциал точки О’ больше потенциала точки О’’ и наоборот. Потенциалы же точек О1 и О2 равны, так как находятся в одинаковых условиях (полностью симметричны). Отсюда следует, что верным является разделение узла О, показанное на рис. 45, б. Эквивалентная схема цепи, полученная после разделения узла О, изображена на рис. 45, в. Отсюда общее сопротивление цепи между точками А и В равно 3 R /2. Эквивалентное сопротивление участка АО1В равно 2 R . Эквивалентная схема цепи, полученная после разделения узла О, изображена на рис. 46,в. Общее сопротивление цепи определим по формуле
Эквивалентное сопротивление участка АО1В равно 2 R . Эквивалентная схема цепи, полученная после разделения узла О, изображена на рис. 46,в. Общее сопротивление цепи определим по формуле 
 1 O м; R 2 = R 6 = 2 O м; R 3 = R 7 =
1 O м; R 2 = R 6 = 2 O м; R 3 = R 7 = 
 r 6 = R 4 R 5 / ( R 4 + R 5 + R 6 ) = 4/7 Ом;
r 6 = R 4 R 5 / ( R 4 + R 5 + R 6 ) = 4/7 Ом;
