
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Пропорционально-интегрирующий регулятор
Выходной сигнал ПИ-регулятора содержит две составляющие:
или в иной форме записи
где При подаче на вход регулятора постоянного рассогласования
Таким образом, постоянная интегрирования
Рисунок 4.5 – Определение постоянной интегрирования
Передаточная функция ПИ-регулятора равна:
откуда видно, что регулятор имеет два параметра настройки – На практике широко используется ПИ-регулятор в изодромном исполнении, для которого выходной сигнал определяется соотношением
где При такой структуре изменение параметра настройки пропорциональной части управления
При подаче на вход регулятора постоянного рассогласования
Таким образом, постоянная изодрома
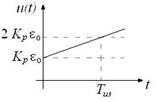
Рисунок 4.6 – Определение постоянной изодрома
Передаточная функция изодромного ПИ-регулятора имеет вид:
Учитывая структуру пропорционально-интегрирующего регулятора, можно утверждать, что онсочетает в себе высокую точность интегрального управления с высоким быстродействием пропорционального управления, однако вносит астатизм в систему, что отрицательно влияет на ее устойчивость.
Пропорционально-интегро-дифференцирующий Регулятор
Выходной сигнал ПИД-регулятора формируется в виде
где Выведем выражение для передаточной функции ПИД-регулятора, для чего осуществим преобразование Лапласа над его уравнением:
откуда
Передаточная функция ПИД-регулятора состоит из 3-х слагаемых, что соответствует параллельному включению трех звенев – усилительного, интегрирующего и идеального дифференцирующего. ПИД-регулятор с взаимосвязанными параметрами настройки описывается выражением
где ПИД-регулятор обеспечивает более сильную коррекцию динамических свойств САУ,сочетая в себе характеристики ранее рассмотренных регуляторов. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 273; Нарушение авторского права страницы
 ,
, ,
, – постоянная (время) интегрирования.
– постоянная (время) интегрирования. сигнал на его выходе будет изменяться по следующему закону:
сигнал на его выходе будет изменяться по следующему закону: .
. определяет промежуток времени, в течение которого выходной сигнал регулятора изменяется от своего начального значения, равного
определяет промежуток времени, в течение которого выходной сигнал регулятора изменяется от своего начального значения, равного  , на величину, равную входному сигналу
, на величину, равную входному сигналу  (рисунок 4.5):
(рисунок 4.5): при t=Ti.
при t=Ti.

 , (4.8)
, (4.8)
 , не связанных между собой.
, не связанных между собой.  ,
, – постоянная (время) изодрома.
– постоянная (время) изодрома. повлияет и на интегральную часть, изменив постоянную интегрирования:
повлияет и на интегральную часть, изменив постоянную интегрирования: .
. сигнал на его выходе будет изменяться по закону:
сигнал на его выходе будет изменяться по закону: .
. определяет промежуток времени, в течение которого выходной сигнал регулятора удваивается (рисунок 4.6):
определяет промежуток времени, в течение которого выходной сигнал регулятора удваивается (рисунок 4.6): при
при  .
.

 . (4.9)
. (4.9) ,
, – невзаимосвязанные параметры настройки.
– невзаимосвязанные параметры настройки. ,
, . (4.10)
. (4.10) ,
, – время изодрома;
– время изодрома; – время предварения.
– время предварения.