
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Коррекция динамических свойств САУ осуществляется для выполнения рассмотренных ранее требований по точности, устойчивости и качеству переходных процессов. Корректирующие звенья
Коррекция проводится с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с корректируемым звеном
а) последовательное включение б) параллельное включение Рисунок 4.1 – Способы включения корректирующих звеньев в систему
Корректирующие обратные связи, помимо классификации на отрицательные и положительные, делятся на жесткие и гибкие. Идеальная жесткая обратная связь осуществляется усилительным звеном с передаточной функцией В линейных системах оба рассмотренных типа коррекции (последовательный и параллельный) эквивалентны, то есть последовательное звено может быть заменено параллельным и, наоборот, при сохранении неизменными динамических свойств САУ. Приравняем результирующие передаточные функции, полученные при использовании обоих типов коррекции:
Отсюда, например, вытекает следующее выражение для передаточной функций последовательного корректирующего звена, эквивалентного данной обратной связи:
Рассмотрим пример коррекции свойств САУ. Пример 4. Охватим жесткой обратной связью интегрирующее звено в составе некоторой САУ (рисунок 4.2).
Рисунок 4.2 – Коррекция свойств интегрирующего звена
В результате коррекции передаточная функция звена примет вид:
где Таким образом, получен важный результат – при охвате интегрирующего звена жесткой обратной связью оно преобразуется в инерционное звено 1-го порядка. Такой прием широко используют для снижения порядка астатизма (количества интегрирующих звеньев) системы и, соответственно, для улучшения ее устойчивости и качества переходных процессов.
ПИД - регулятор
Изменение свойств САУ путем введения корректирующих звеньев возможно, если известны характеристики элементов системы, подлежащие коррекции. Однако практика конструирования САУ различного назначения позволила найти общие принципы управления, применение которых обеспечивает требуемые качества САУ даже в отсутствие полной информации о свойствах системы. Одним из самых распространенных классов САУ являются системы автоматического регулирования, задача которых заключается в поддержании текущего значения выходной величины объекта на заданном уровне. Устройство управления, которое в этом случае называют регулятором, формирует управляющее воздействие Наибольшее применение в системах управления по отклонению получил алгоритм, носящий название пропорционально-интегро-дифференцирующего закона регулирования:
где В системах автоматического регулирования в зависимости от вида используемой коррекции регуляторы классифицируются на следующие типы: пропорциональный (П), интегрирующий (И), пропорционально-интегрирующий (ПИ), пропорционально-дифференциру-ющий (ПД) и пропорционально-интегро-дифференцирующий (ПИД) регуляторы. Соответственно говорят об одноименных алгоритмах или законах регулирования. Таким образом, САР можно рассматривать, как систему с отрицательной обратной связью, для улучшения характеристик которой применяют последовательное корректирующее звено в виде ПИД-ре-гулятора или его вариантов (рисунок 4.3).
Рисунок 4.3 – ПИД-регулятор в составе САР
Оценим влияние отдельных составляющих ПИД-закона регулирования на точность, устойчивость и быстродействие систем. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 337; Нарушение авторского права страницы
 , либо параллельно ему с образованием местной обратной связи (рисунок 4.1).
, либо параллельно ему с образованием местной обратной связи (рисунок 4.1).  и параллельные
и параллельные  . Следует отметить, что при параллельной коррекции основное применение получил именно вариант обратной (отрицательной) связи, а не прямого включения.
. Следует отметить, что при параллельной коррекции основное применение получил именно вариант обратной (отрицательной) связи, а не прямого включения.

 , идеальная гибкая обратная связь – дифференцирующим звеном с передаточной функцией
, идеальная гибкая обратная связь – дифференцирующим звеном с передаточной функцией  , реальная гибкая обратная связь – реальным дифференцирующим звеном с передаточной функцией
, реальная гибкая обратная связь – реальным дифференцирующим звеном с передаточной функцией  .
. .
. . (4.1)
. (4.1)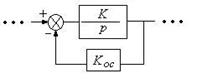
 ,
, ,
,  .
. в соответствии с некоторым алгоритмом.
в соответствии с некоторым алгоритмом. , (4.2)
, (4.2) – сигнал ошибки (рассогласования);
– сигнал ошибки (рассогласования); – коэффициент усиления пропорциональной части управления;
– коэффициент усиления пропорциональной части управления; – коэффициент усиления интегральной части управления;
– коэффициент усиления интегральной части управления; – коэффициент усиления дифференциальной части управления;
– коэффициент усиления дифференциальной части управления; – время регулирования.
– время регулирования.