
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Колебания пружинного, математического
и физического маятников–примеры свободных Гармонических колебаний Пружинный маятник – система, состоящая из груза массой Согласно закону Гука,
где Поскольку
Физический маятник– система, состоящая из твердого тела, которое может колебаться около горизонтальной оси, не проходящей через центр масс, под действием момента силы тяжести (рисунок 5.4).
Рисунок 5.4 – Физический маятник
Физический маятник, отклоненный от положения равновесия на малый угол В соответствии с основным законом динамики вращательного движения момент возвращающей силы
где Учитывая, что
Это дифференциальное уравнение гармонического колебания физического маятника. Здесь где
Математический маятник представляет собой материальную точку (с точечной массой), колеблющуюся на невесомой и нерастяжимой нити (рисунок 5.5).
Рисунок 5.5 – Математический маятник
В данном случае колебание материальной точки совершается под действием силы
Выражение (5.18) может быть получено из представления, что математический маятник является частным случаем физического маятника; предполагая, что вся масса сосредоточена в центре масс. В этом случае момент инерции математического маятника равен
Подставив это выражение в выражение (5.19), получим формулу для периода колебаний математического маятника:
На практике маятниками являются самые различные части зданий и даже целые сооружения (мосты, трубы, башни и т.п.). Останкинская телебашня (г. Москва) высотой |
Последнее изменение этой страницы: 2019-04-21; Просмотров: 184; Нарушение авторского права страницы
 , подвешенного на абсолютно упругой пружине и совершающего гармонические колебания под действием упругой силы
, подвешенного на абсолютно упругой пружине и совершающего гармонические колебания под действием упругой силы  (рисунок 5.2).
(рисунок 5.2). второму закону Ньютона
второму закону Ньютона  , дифференциальное уравнение кинематики колебательного движения пружинного маятника может быть выражено как
, дифференциальное уравнение кинематики колебательного движения пружинного маятника может быть выражено как ,
, – собственная циклическая (круговая) частота пружинного маятника.
– собственная циклическая (круговая) частота пружинного маятника.  то период пружинного маятника определяется по формуле
то период пружинного маятника определяется по формуле . (5.12)
. (5.12)
 , под действием момента силы тяжести
, под действием момента силы тяжести  возвращается в исходное положение. Роль возвращающей силы выполняет
возвращается в исходное положение. Роль возвращающей силы выполняет  . Величина этой составляющей при малых отклонениях пропорциональна смещению тела от положения равновесия, т.е. она выполняет роль упругой силы и по этой причине такую силу называют квазиупругой (квази–псевдоложно). Несложные выводы позволяют определить вид уравнения движения физического маятника и период его колебания. Выразим
. Величина этой составляющей при малых отклонениях пропорциональна смещению тела от положения равновесия, т.е. она выполняет роль упругой силы и по этой причине такую силу называют квазиупругой (квази–псевдоложно). Несложные выводы позволяют определить вид уравнения движения физического маятника и период его колебания. Выразим  , при малых
, при малых  можно
можно 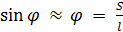 .
. будет равен:
будет равен: (по закону динамики);
(по закону динамики); (по определению),
(по определению), – плечо;
– плечо;  – угловое ускорение; I– момент инерции тела.
– угловое ускорение; I– момент инерции тела. и
и  , получим
, получим  или
или (5.13)
(5.13) , откуда
, откуда  , (5.14)
, (5.14) – собственная частота физического маятника. Выражение для периода колебаний будет:
– собственная частота физического маятника. Выражение для периода колебаний будет: (5.15)
(5.15)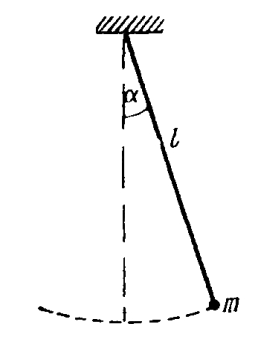
 , которая является квазиупругой. Дифференциальное уравнение движения будет представлено в виде
, которая является квазиупругой. Дифференциальное уравнение движения будет представлено в виде , (5.16)
, (5.16) , (5.17)
, (5.17) собственная частота колебания математического мятника, а период колебаний определится как
собственная частота колебания математического мятника, а период колебаний определится как (5.18)
(5.18) (5.19)
(5.19)
 совершает колебания, при которых её вершина отклоняется от оси на
совершает колебания, при которых её вершина отклоняется от оси на  . При вычислении периодов таких колебаний, естественно, учитываются особенности этих конструкций.
. При вычислении периодов таких колебаний, естественно, учитываются особенности этих конструкций.