
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Решение систем линейных алгебраических уравнений
Рассмотрим систему, состоящую из n уравнений с n неизвестными.
a21 x 1 + a 22 x 2 + a23 x 3 +... + a2n x n = b 2 (4.1) ........................ an1 x 1 + an2 x 2 + an3 x 3 +... + ann x n = b n
где x i – неизвестные, подлежащие определению, aij – коэф-фициенты при неизвестных; b i - числа, называемые свободными членами (правыми частями) системы уравнений. Форма записи системы (4.1) - скалярная
Совокупность чисел x 1 = λ 1, x 2 = λ 2, ..., x n = λ n, удовлетворяющих (4.1) называется решением СЛАУ. СЛАУ называется совместной, если она имеет хотя бы одно решение; в противном случае она называется несовместной. СЛАУ называется определенной, если это решение - единственное. Если СЛАУ не имеет ни одного решения, то такая система является неопределенной. Задача теории систем линейных уравнений состоит в разработке методов, позволяющих узнать: - совместна ли данная СЛАУ; - если совместна, то установить число решений; - указать способ отыскания этих решений.
Матричная форма записи системы (4.1) имеет вид А = Некоторые обозначения: АТ – матрица, транспонированная к матрице А, т.е. a ij = a ji. А-1 – матрица, обратная к матрице А, т.е. А-1 · А = I, где I - единичная матрица.
При решении СЛАУ возникают проблемы, связанные с вопросами: 1) разрешима ли данная СЛАУ; 2) каким методом ее решать; 3) какова чувствительность решения к ошибкам округления исходных данных.
Рассмотрим эти вопросы подробнее. 1) Теорема (из курса высшей алгебры) Система n уравнений с n неизвестными, определитель которой отличен от 0, имеет решение, причем единственное. (Это условие необходимое, но не достаточное.)
k1 = -2, k2 = 2, k1 ≠ k2, т.е. прямые пересекаются
det A = (-1)∙ (-1) – 1∙ 1 = 0 k1 =1, k2 = 1, k1 = k2, т.е. прямые не пересекаются 2) К выбору методов решения необходимо подходить рационально: например, метод Крамера требует около n2n! операций умножения и деления. Т.е. для системы с 20 уравнениями и 20 неизвестными это число составляет 1021. Для современных ЭВМ, выполняющих миллионы операций в сек., для решения такой системы потребуется около 1015 сек. или 3∙ 106 лет. Следовательно, для систем высокого порядка требуются методы, приводящие к меньшему числу операций.
3) Устойчивость решения относительно погрешностей правых частей и элементов матрицы покажем на примере:
Если правые части x1 = 3, x2 = -1, 0203. Такие СЛАУ являются плохо обусловленными.
Геометрическая иллюстрация: Графики прямых этой плохо обусловленной системы почти параллельны. Следовательно, небольшое изменение наклона или сдвиг одной прямой значительно влияет на положение точки пересечения прямых. Критерий плохой обусловленности
Чем больше
На практике обычно проверяют неравенство 0 определителя СЛАУ.
Методы решения СЛАУ
Методы решения СЛАУ подразделяются на точные и итерационные. Точные – это методы, которые определяют решение при помощи конечного числа арифметических операций. При этом, если исходные данные и вычисления точны, то получается точное решение (методы Крамера, Гаусса). Точные методы выполняются в два этапа: - преобразование исходной СЛАУ к более простому виду; - решение упрощенной системы и получение неизвестных.
Приближенные (итерационные) методы
Предварительно задаются некоторыми приближенными значениями неизвестных При выполнении определенных условий после бесконечного числа шагов можно получить точное решение.
На практике вычисления прерывают при достижении заданной точности ε. Для этого на каждой итерации с заданной точностью сравнивают два последовательных приближения Если выполняются условия
то полученные на i - итерации значения Метод Гаусса (последовательного приближения неизвестных)
где А =
1. Последовательно исключая неизвестные, приводим матрицу коэффициентов к треугольному виду,
2. Находим неизвестные, начиная с xn, xn-1, xn-2,..., x2, x1. Метод прогонки (модификация метода Гаусса для систем с 3-х диагональной матрицей коэффициентов)
Каждое i – уравнение содержит не более 3 неизвестных xi-1, xi, xi+1.
Последовательные исключения выполняются так: Из ''0'' уравнения выражаем Затем выразим x1 через x2 и подставим во 2-е уравнение и т.д.
Будем считать, что соотношение между xi и xi+1 известно
тогда
Подставим (4.6) в i – уравнение и решим относительно xi.
Выразим Сравнив (4.7) и (4.5), получим прогоночные коэффициенты
При i = 0 из (4.5) получим сравнив с (4.4) получим
Этапы метода прогонки
1) Прямой ход: каждое i – неизвестное выражается через i+1– е с помощью прогоночных коэффициентов (4.8) и (4.9) (i =0, 1, ..., n-1) 2) Обратный ход: с помощью (4.5) определим xn, затем
и сравним с последним уравнением (4.3).
Выразив xn, получим
Далее, используя (4.5) и формулы прогоночных коэффициентов (4.8) и (4.9), находят xn-1, xn-2,..., x1, x0.
Тема 5 Популярное:
|
Последнее изменение этой страницы: 2016-03-15; Просмотров: 1510; Нарушение авторского права страницы
 a11 x 1 + a12 x 2 + a13 x 3 +... + a1n x n = b 1
a11 x 1 + a12 x 2 + a13 x 3 +... + a1n x n = b 1 ; x =
; x =  ; b =
; b =  ;
;  (4.2)
(4.2) Покажем разрешимость СЛАУ на графике для системы двух уравнений.
Покажем разрешимость СЛАУ на графике для системы двух уравнений.





 det A = 2∙ 1 – (-2)∙ 1 = 4 ≠ 0
det A = 2∙ 1 – (-2)∙ 1 = 4 ≠ 0





 det A = - 0, 0001 ≠ 0
det A = - 0, 0001 ≠ 0 точное решение x1 = 1, x2 = 1
точное решение x1 = 1, x2 = 1  вычислены с незначительной погрешностью, b1 = 1, 989903 и b2 = 1, 970106, то получим решение
вычислены с незначительной погрешностью, b1 = 1, 989903 и b2 = 1, 970106, то получим решение 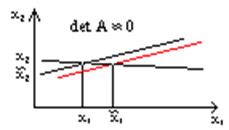
 ,
,  всегда ≥ 1.
всегда ≥ 1. , тем хуже обусловлена система (
, тем хуже обусловлена система (  ,
,  ...,
...,  . Из этих значений тем или иным способом получают новые ‘’улучшенные’’ приближенные значения
. Из этих значений тем или иным способом получают новые ‘’улучшенные’’ приближенные значения  ,
,  ...,
...,  . С новыми значениями поступают также.
. С новыми значениями поступают также. ,
,  , ...,
, ...,  ,
,  ,
,  ; x =
; x =  ; b =
; b =  ;
; 

 , i= 1, 2, ..., n,
, i= 1, 2, ..., n,  (4.3)
(4.3) ;
;  (4.4)
(4.4) и подставляем в 1-е уравнение
и подставляем в 1-е уравнение  .
. , (4.5)
, (4.5) (4.6)
(4.6)
 .
. (4.7)
(4.7) ,
,  (4.8)
(4.8) .
. ,
,  (4.9)
(4.9)
 ,
, 

 (4.10)
(4.10)