
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ УПРАВЛЕНИЯСтр 1 из 25Следующая ⇒
ТЕОРИЯ УПРАВЛЕНИЯ
Часть 1
ЛИНЕЙНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ Конспект лекций
ВВЕДЕНИЕ Теория управления является в настоящее время одной из важнейших технических наук общего применения. Она дает основную теоретическую базу для исследования и проектирования любых автоматических и автоматизированных систем во всех областях техники и деятельности человека. Теория автоматического управления и регулирования изучает процессы управления, методы их исследования и основы проектирования автоматических систем и входит в науку под общим названием кибернетика. Теория управления прошла значительный путь своего развития. На начальном этапе были созданы методы анализа устойчивости, качества и точности регулирования непрерывных линейных систем. Затем получили развитие методы анализа дискретных и дискретно-непрерывных систем. Можно отметить, что способы расчета непрерывных систем базируются на частотных методах, а расчета дискретных и дискретно-непрерывных - на методах z-преобразования. В настоящее время развиваются методы анализа нелинейных систем автоматического управления. Нарушение принципа суперпозиции в нелинейных системах, наличие целого ряда чередующихся, в зависимости от воздействия, режимов устойчивого, неустойчивого движений и автоколебаний затрудняют их анализ. Еще с большими трудностями встречается проектировщик при расчете экстремальных и самонастраивающихся систем регулирования. Дальнейшее развитие методы синтеза получили на основе принципов максимума и динамического программирования, когда определяется оптимальный с точки зрения заданного критерия качества закон регулирования. Оптимальный закон характеризует верхний предел качества системы, к которому можно стремиться при ее проектировании. Метод пространства состояний в теории управления способствует совершенствованию методов проектирования сложных систем. Последнее требует значительного увеличения объема перерабатываемой информации и более сложных методов формирования законов управления. Краткое изложение основ теории управления является основной задачей данного учебного пособия. содержание Содержание Глоссарий ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ УПРАВЛЕНИЯ вопросы 1.1. Основные понятия и определения Система терминов является азбукой любой науки. Поэтому изучение науки об управлении целесообразно начать с рассмотрения основных понятий [9]. Теория управления - наука, изучающая законы управления, принципы управления, принципы построения систем управления, а также методы анализа и синтеза систем управления. Автоматика – это отрасль науки и техники, охватывающая теорию и практику автоматического управления. Автоматизация – это процесс совершенствования производства, характеризующийся, прежде всего, уменьшением потока информации, поступающей от человека к объекту управления. Под производством следует понимать создание не только материальных ценностей, но и духовных - образование и наука, денежных средств - банковская деятельность и торговля, здоровья - медицина и т.д., то есть производство включает в себя любую деятельность человека, связанную с производством продуктов и услуг. Кибернетика - наука об общих законах получения, хранения, переработки и передачи информации. Основной объект исследования - кибернетические системы, рассматриваемые абстрактно, вне зависимости от их материальной природы, например, автоматические регуляторы в технике, ЭВМ, человеческий мозг, биологические популяции, человеческое общество и т.д. Основоположником кибернетики считается Норберт Винер, опубликовавший в 50-е годы ХХ века идеи о проблеме управления как о ведущей стороне материального производства, об общности принципов и законов управления и возможности создания искусственного интеллекта. Система – это целенаправленное множество взаимосвязанных элементов любой природы. Внешняя среда – это множество существующих вне системы элементов любой природы, оказывающих влияние на систему или находящихся под ее влиянием. Функционирование системы - проявление функций системы во времени, означает переход системы из одного состояния в другое, т.е. движение в пространстве состояний. Состояние системы - минимальный набор переменных величин, способных однозначно определить положение системы в данный момент времени. Управление – это такая организация того или иного процесса, которая обеспечивает достижение поставленных целей. Необходимыми условиями управления являются наличие объекта управления и цели управления. Задача управления заключается в формировании требуемого для достижения цели закона управления. Кроме того, управление можно рассматривать как целенаправленное воздействие на объект управления, в результате которого последний переходит в требуемое состояние. Объект управления – это часть окружающего нас мира, на которую можно воздействовать с определенной целью. В технике под объектом управления подразумевается техническое устройство или технологический процесс, некоторые физические величины которого подлежат стабилизации или целенаправленным изменениям. Состояние объекта управления – это набор параметров, характеризующих его в каждый момент времени. В зависимости от участия человека в процессе управления последнее подразделяется на ручное, автоматическое и автоматизированное. При ручном управлении закон управления формируется непосредственно человеком. Системы, реализующие ручное управление, называются системами ручного управления. При автоматическом управлении закон управления формируется без участия человека. Системы, реализующие автоматическое управление, называются системами автоматического управления (САУ). Автоматизированное управление представляет собой сочетание ручного и автоматического управления. При автоматизированном управлении кроме технических средств в формировании закона управления участвуют люди. При этом роль человека заключается в принятии решения, выборе варианта управления. Системы, реализующие автоматизированное управление, называются автоматизированными системами управления (АСУ). Все автоматические устройства делятся на два больших класса: 1. Автоматы – это технические устройства, которые без участия человека в течение длительного времени выполняют одноразовые или многоразовые циклические операции на основе заданной жесткой программы. 2. Автоматические системы – это технические устройства, которые без участия человека в течение длительного времени поддерживают неизменными или изменяют требуемым образом какие-либо физические величины в том или ином техническом устройстве или технологическом процессе на основе обработки информации о состоянии управляемого объекта.
Принципы управления, принципы построения Систем управления Существует чрезвычайно большое разнообразие систем, выполняющих те или иные функции по управлению самыми различными процессами во всех областях деятельности человека. Однако принципы построения систем управления, принципы управления как и законы носят всеобщий характер. На сегодня различают четыре принципа управления: 1. Принцип разомкнутого цикла 2. Принцип замкнутого цикла или принцип обратной связи. 3. Комбинированный принцип. 4. Принцип адаптации.
Принцип разомкнутого цикла з аключается в том, что требуемый закон управления формируется только на основе цели управления в соответствии с задающим воздействием. Управление, реализующее данный принцип, называется управлением по задающему воздействию. Система, построенная по этому принципу, является разомкнутой или незамкнутой. Функциональная схема разомкнутой системы изображена на рис.1.1.
Рис. 1.1. Функциональная схема разомкнутой системы
Элементы системы: ОУ – объект управления; ЗУ – задающее устройство; R – регулятор. Координаты (переменные) системы: g(t) – задающее воздействие; y(t) – управляемая (регулируемая) величина; f(t) – возмущающее воздействие; u(t) – управляющее воздействие.
Объект управления - это техническое устройство или технологический процесс, некоторые физические величины которого поддерживаются неизменными или подлежат целенаправленным изменениям. Задающее устройство предназначено для формирования цели управления путем выработки задающего воздействия. Регулятор служит для формирования закона управления, в соответствии с которым выдает управляющее воздействие, прикладываемое к объекту управления для перевода последнего в требуемое состояние. Входными величинами системы являются соответственно задающее и возмущающее воздействия. Задающее воздействие - это воздействие, определяемое целью управления, в соответствии с которым должна изменяться управляемая величина. Возмущающее воздействие представляет собой воздействие внешней среды на объект управления и, как правило, оказывает на него негативное влияние. Оно бывает объективно существующим и случайным. Выходной координатой системы является управляемая или регулируемая величина. Эта величина характеризует состояние объекта управления и подлежит стабилизации или изменению заданным образом в соответствии с целью управления. Для того чтобы управляемая величина принимала требуемые значения, необходимо к объекту управления приложить воздействие u(t) – управляющее воздействие. Управляющее воздействие формируется регулятором и прикладывается к объекту управления для того, чтобы последний перешел в нужное состояние. Следовательно, задача управления и состоит в формировании управляющего воздействия. В разомкнутой системе, как следует из принципа разомкнутого цикла и функциональной схемы (рис.1.1), регулятор формирует управляющее воздействие только на основе задающего воздействия, т.е. u(t) = F[g(t)]. (1.1)
Выражение (1.1) представляет собой закон управления разомкнутой системы. Закон управления - это алгоритм или функциональная зависимость, в соответствии с которой регулятор формирует управляющее воздействие. Характерным для разомкнутой системы является то, что процесс работы системы не зависит непосредственно от результата ее воздействия на управляемый объект. Отсюда главный недостаток разомкнутой системы - низкая точность работы. По разомкнутому принципу работают многие известные всем автоматы, например, часы, банкомат, автомат, выбрасывающий какие-либо определенные предметы (билеты, шоколад) при опускании в него определенной комбинации монет и т.д. Примером такой системы может служить системы управления стрельбой из ружья или артиллерийского орудия. Принцип замкнутого цикла (принцип обратной связи) з аключается в том, что закон управления формируется на основе отклонения управляемой величины от задающего воздействия. Такое управление называется управлением по отклонению, при котором управляемая величина оказывает влияние на управляющее воздействие. Система, реализующая этот принцип, называется замкнутой или системой управления с обратной связью. Функциональная схема замкнутой системы изображена на рис. 1.2.
Рис. 1.2. Функциональная схема замкнутой системы
Элементы системы: ОУ – объект управления; ЗУ – задающее устройство; ИПУ - измерительно-преобразовательное устройство; СУ - сравнивающее устройство; R – регулятор. Координаты (переменные) системы: g(t) – задающее воздействие; y(t) – управляемая (регулируемая) величина; f(t) – возмущающее воздействие; x(t) - рассогласование (ошибка); u(t) – управляющее воздействие.
Для получения замкнутой системы требуется разомкнутую систему “замкнуть” путем введения в нее дополнительных устройств: измерительно-преобразовательного и сравнивающего. Измерительно-преоб-разовательное устройство служит для измерения (наблюдения) управляемой величины и преобразования к виду, удобному для обработки и передачи. ИПУ реализует обратную связь, то есть связь причины и следствия, которая позволяет формировать управляющее воздействие с учетом результата управления. Сравнивающее устройство предназначено для сравнения управляемой величины с задающим воздействием и выдачи результата сравнения в виде сигнала рассогласования x(t) = g(t) - y(t). (1.2)
Рассогласование представляет собой отклонение управляемой величины от задающего воздействия, т.е. является ошибкой системы, и служит источником формирования регулятором управляющего воздействия. Следовательно, закон управления в замкнутой системе является функцией рассогласования
u(t) = F[x(t)]. (1.3)
Управляющее воздействие прикладывается к объекту управления до тех пор пока x(t)®0. Таким образом, замкнутая система работает так, чтобы все время сводить к нулю рассогласование x(t). Принцип замкнутого цикла (обратной связи) – основной принцип управления. Он лежит в основе подавляющего большинства систем управления, так как решающую роль при управлении играет информация о результатах управления. Основным достоинством замкнутых систем является их высокая точность, однако быстродействие их ниже, чем у разомкнутых систем. Примерами замкнутых систем могут служить: система стабилизации температуры в холодильнике, автопилот, система самонаведения снаряда на цель, система обучения в высшей школе и т.д. Комбинированный принцип з аключается в сочетании принципов разомкнутого и замкнутого циклов в одной системе. Такое управление, сочетающее в себе управление по задающему воздействию и отклонению, называется комбинированным управлением. Оно обеспечивает высокую точность и высокое быстродействие. Система, реализующая комбинированный принцип, называется комбинированной. Функциональная схема комбинированной системы представлена на рис. 1.3.
Рис. 1.3. Функциональная схема комбинированной системы
Для реализации комбинированной системы в замкнутую систему требуется включить дополнительные функциональные элементы: КЦЗ и КЦВ. КЦЗ – компенсирующая цепь по задающему воздействию, позволяет скомпенсировать ошибку работы системы от задающего воздействия. КЦВ – компенсирующая цепь по возмущающему воздействию, позволяет скомпенсировать негативное влияние возмущающего воздействия на работу системы. Компенсирующие цепи представляют собой дифференцирующие устройства и служат для прогнозирования входных воздействий системы, что позволяет системе работать с предвидением. Благодаря этому, комбинированные системы обладают повышенной точностью и быстродействием. Из функциональной схемы следует, что закон управления комбинированной системы имеет вид:
u(t) = F[x(t), g(t), f(t)]. (1.4)
В общем случае управляющее воздействие в комбинированной системе является функцией рассогласования, задающего и возмущающего воздействий. Кроме того, можно сделать комбинированную систему только по задающему воздействию, если
u(t) = F[x(t), g(t)], (1.5) и только по возмущающему воздействию, если
u(t) = F[x(t), f(t)]. (1.6)
Комбинированное управление позволяет реализовывать инвариантные к внешним воздействиям системы управления. Принцип адаптации заключается в том, что системы, реализующие этот принцип, в процессе работы приспосабливаются, адаптируются к изменяющимся внешним условиям. Такое управление называется адаптивным, а системы, работающие в соответствии с данным принципом, называется адаптивными и являются самыми совершенными. Адаптивные системы имеют в своем составе, как правило, дополнительные блоки и контуры для анализа показателей качества процесса управления или внешних условий, по которым необходима адаптация. Адаптивные системы разделяются на экстремальные, самонастраивающиеся и самоорганизующиеся. Экстремальные системы или системы с самонастройкой программы. Это системы, которые сами ищут наивыгоднейшую программу, т.е. то значение управляемой величины, которое нужно в данный момент выдерживать, чтобы режим работы объекта управления был наилучшим по какому-либо параметру. При этом имеется в виду не выбор закона управления, а автоматическая установка задающего воздействия, такого, при котором обеспечивается наивыгоднейшее значение управляемой величины при изменяющихся внешних условиях работы системы. Таким образом, на экстремальную систему накладывается дополнительная задача автоматического поиска наивыгоднейшего значения требуемой управляемой величины, т.е. самой программы управления. На рис. 1.4 приведена функциональная схема экстремальной системы. Для получения экстремальной системы в замкнутую систему дополнительно включают УАПЭ - устройство автоматического поиска экстремума, которое анализирует параметр объекта управления r, определяющий его режим работы, и воздействует на задающее устройство с целью изменения задающего воздействия g(t) для обеспечения наивыгоднейшего режима работы объекта управления. Анализ параметра r и изменение задающего воздействия g(t) осуществляется до тех пор, пока r (параметр объекта управления, который оптимизируется) не примет экстремальное значение.
Рис. 1.4. Функциональная схема экстремальной системы
Примерами экстремальных систем могут служить: система автоматического поддержания максимальной скорости проходки скважины турбобуром при меняющихся свойствах грунта; автоматические системы управления различными производственными процессами, поддерживающие наивыгоднейший режим работы станков; система поддержания наивыгоднейшей скорости движения автомобиля, соответствующей минимуму расхода горючего на единицу длины пути и т.д. Самонастраивающиеся системы с самонастройкой параметров. Это такие системы, в которых автоматически, не заданным заранее образом, в процессе работы в соответствии с изменением внешних условий изменяются какие-нибудь параметры регулятора таким образом, чтобы заданное качество работы системы сохранялось или обеспечивалось максимальное качество, возможное в данных реальных условиях. Эти системы работают по принципу самообучения. В процессе работы они изучают объект управления и обучаются управлять им наилучшим образом. Простейшими самонастраивающимися системами являются системы ссамонастройкой параметров регулятора по задающему и возмущающему воздействиям (рис.1.5). Эти системы содержат в своем составе анализатор А для анализа задающего и возмущающего воздействий и контур настройки регулятора КН для настройки параметров регулятора в соответствии с заданным критерием. Примерами самонастраивающихся систем могут служить радиотехнические системы с контурами автоматических регулировок усиления (АРУ) и подстроек частоты (АПЧ).
Рис. 1.5. Функциональная схема самонастраивающейся системы
Самоорганизующиеся системы или системы с самонастройкой структуры. Это системы, которые наилучших режимов работы достигают не изменением параметров регулятора, а путем изменения самой структуры регулятора не заданным заранее образом. В самоорганизующуюся систему закладывается лишь тот или иной определенный критерий качества работы системы или комбинация критериев для различных внешних условий работы системы. Система сама путем автоматического поиска выбирает такую структуру (из возможных, имеющихся в ее распоряжении), при которой удовлетворяется заданный критерий качества работы всей системы. Примером систем с самонастройкой структурыявляютсядвухотсчетные системы, получившие широкое распространение. Эти системы имеют в своем составе два измерительных канала: грубого и точного отсчетов. Нужный измерительный канал выбирается системой в зависимости от величины рассогласования. Кроме чисто технических автоматических систем аналогичные принципы действия заложены и в биологических системах, экономических системах и т.п., что изучается соответствующими направлениями кибернетики и общей теории систем управления.
Управления
Система управления представляет собой совокупность объекта управления, регулятора и датчика рассогласования. Типовая автоматическая система может быть представлена в следующем виде (рис.1.6).
Рис. 1.6. Функциональная схема типовой автоматической системы
Координаты (переменные) системы: g(t) –задающее воздействие; y(t) – управляемая величина; f(t) – возмущающее воздействие; x(t) = g(t) - y(t) – рассогласование; u(t) – управляющее воздействие. Функциональные элементы системы: ОУ – объект управления; ЗУ – задающее устройство; ИПУ – измерительно-преобразовательное устройство; СУ1, СУ2 – сравнивающие устройства; РО – регулирующий орган, представляет собой техническое устройство, которое действует на объект управления и непосредственно изменяет управляемую величину y(t); ИМ – исполнительный механизм, представляет собой техническое устройство, воздействующее на регулирующий орган; в состав исполнительного механизма, как правило, входит какой-либо двигатель; УМ – усилитель мощности, представляет собой техническое устройство, которое питает энергией исполнительный механизм; АУ – амплитудный усилитель, устройство, обеспечивающее требуемую чувствительность системы и, в конечном счете, точность ее работы; КУ1, КУ2 – корректирующие устройства, включаются в систему для того, чтобы сформировать требуемый закон управления для реализации заданного качества управления; ГОС – главная обратная связь, реализуется измерительно-преобра-зовательным устройством и обеспечивает передачу информации об управляемой величине на вход системы; МОС – местная или внутренняя обратная связь. В настоящее время для управления широко используется вычислительная техника, которая позволяет программно реализовать задающее устройство, амплитудный усилитель, сравнивающие и корректирующие устройства. Остальные функциональные элементы реализуются аппаратно. ЗУ, ИПУ и СУ1 образуют датчик рассогласования ДР. Все остальные функциональные элементы за исключением объекта управления составляют регулятор R. Регулятор, в котором датчик рассогласования может непосредственно (без дополнительного источника энергии) воздействовать на регулирующий орган, называется регулятором прямого действия. Таким образом, любую систему управления, рассматриваемую как совокупность объекта управления ОУ, датчика рассогласования ДР и регулятора R, можно изобразить в виде упрощенной функциональной схемы (рис. 1.7).
Рис. 1.7. Функциональная схема системы
Элементы системы: ОУ – объект управления; ДР - датчик рассогласования; R – регулятор. Координаты (переменные) системы: g(t) – задающее воздействие; y(t) – управляемая (регулируемая) величина; f(t) – возмущающее воздействие; x(t) - рассогласование (ошибка); u(t) – управляющее воздействие.
Еще в более общем виде систему управления можно рассматривать как ”черный ящик” (рис. 1.8), преобразующий задающее воздействие в управляемую величину.
Рис. 1.8. Кибернетическая модель системы управления
При таком представлении система задается оператором А, устанавливающим связь между входом и выходом:
y(t) = A{g(t)}, (1.7)
где A – оператор системы.
ВОПРОСЫ К РАЗДЕЛУ 1 1. Что изучает теория управления? 2. Определите понятия управление и объект управления. 3. Назовите виды автоматических устройств. 4. Перечислите принципы управления и поясните их. 5. Что представляет собой закон управления? 6. Каково назначение регулятора в системе? 7. По каким признакам классифицируются системы управления? 8. Дайте классификацию систем по виду задающего воздействия. 9. Назовите необходимые и достаточные условия линейности систем. 10. Что представляет собой система управления? Перечислите основные элементы системы автоматического управления. Содержание Глоссарий МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ Общие понятия Для анализа и синтеза системы управления требуется ее математическое описание, которое бы связывало поведение координат системы - ее переменных величин в процессе работы, то есть во времени. Поведение координат системы во времени называется динамикойсистемы. Так как система состоит из взаимосвязанных функциональных элементов, то для получения ее математического описания необходимо получить математические описания отдельных элементов. Математическое описание элемента устанавливает связь во времени между его текущими значениями выходных y(t) и входных x(t) величин. Динамикаэлемента, то есть поведение его координат во времени, описывается дифференциальными уравнениями. В динамике связь между координатами, то есть между входными и выходными величинами, меняется во времени. Динамика характеризуется переходным процессом. При времени, стремящемся к бесконечности t®¥, текущие координаты y(t) и x(t) принимают постоянные установившиеся значения и наступает статика элемента, которая описывается алгебраическими уравнениями. В статике входные и выходные величины элемента постоянные: x(¥ )=x0=const; y(¥ )=y0=const. Эти постоянные величины называются установившимися. А процесс, соответствующий статике, называется установившимся процессом. Теоретически статика наступает при t®¥, однако на практике принято считать, что статика наступает тогда, когда текущие координаты отличаются от своих установившихся значений не более чем на 5%. Динамическое уравнение отдельного элемента составляется по правилам соответствующей технической науки (элемент может представлять собой электрическую машину, механическую передачу, нагревательный прибор, электрическую цепь, электронную схему и т.п.).
Позиционные звенья
В звеньях позиционного, или статического типа, линейной зависимостью y = kx связаны выходная и входная величины в установившемся режиме. Коэффициент пропорциональности k между выходной и входной величинами представляет собой коэффициент передачи звена. Позиционные звенья обладают свойством самовыравнивания, то есть способностью самостоятельно переходить в новое установившееся состояние при ограниченном изменении входного воздействия.
Безынерционное (идеальное усилительное) звено. Это звено не только в статике, но и в динамике описывается алгебраическим уравнением y(t) = kx(t). (3.14) Передаточная функция: W(s) = k. (3.15)
Амплитудно-фазовая частотная характеристика:
W(jw) = k, A(w) = k, y(w) = 0. (3.16)
Переходная и импульсная функции:
h(t) = k1(t), w(t) = kd(t). (3.17)
Безынерционное звено является некоторой идеализацией реальных звеньев. В действительности ни одно звено не в состоянии равномерно пропускать все частоты от 0 до ¥. Примерами таких безынерционных звеньев могут служить жесткая механическая передача, часовой редуктор, электронный усилитель сигналов на низких частотах и др. Апериодическое (инерционное) звено первого порядка. Уравнение и передаточная функция звена: (Tp+1) y(t) = x(t), где T - постоянная времени, характеризует степень инерционности звена, т.е. длительность переходного процесса. Амплитудно-фазовая частотная характеристика: W(jw) = Таким образом, апериодическое звено первого порядка является фильтром низких частот. Переходная и импульсная функции: h(t) = (1 - Примерами апериодического звена первого порядка могут служить RC цепочка, нагревательный элемент и др. Апериодическое (инерционное) звено второго порядка. Дифференциальное уравнение звена имеет вид
причем предполагается, что 2Т2£ Т1. В этом случае корни характеристического уравнения вещественные и уравнение (3.21) можно переписать в виде:
( T3p+1)(T4p+1) y(t) = x(t), (3.22) где Передаточная функция звена
Из выражения (3.23) следует, что апериодическое звеновторого порядка можно рассматривать как комбинацию двух апериодических звеньев первого порядка. Примерами апериодического звена второго порядка могут служить двойная RC цепочка, электродвигатель постоянного тока и др. Колебательное звено. Описывается дифференциальным уравнением
при Т1< 2T2 корни характеристического уравнения комплексные и уравнение (3.24) переписывают в виде
(T2p2+2xTp+1) y(t) = x(t), (3.25)
где Т - постоянная времени, определяющая угловую частоту свободных колебаний l=1/Т; x - параметр затухания, лежащий в пределах 0< x< 1. Общепринятая запись передаточной функции колебательного звена имеет вид
Амплитудно-фазовая частотная характеристика звена:
Временные характеристики представляют собой затухающие периодические процессы. Примерами колебательного звена могут служить электрический колебательный контур, электродвигатель постоянного тока, маятник и др. Консервативное звено. Консервативное звено является частным случаем колебательного при x=0. Оно представляет собой идеализированный случай, когда можно пренебречь влиянием рассеяния энергии в звене. Амплитудно-фазовая характеристика совпадает с вещественной осью. При 0< w< 1/T характеристика совпадает с положительной полуосью, а при w> 1/T - с отрицательной полуосью. Временные характеристики соответствуют незатухающим колебаниям с угловой частотой 1/T.
Интегрирующие звенья В звеньях интегрирующего типа линейной зависимостью Идеальное интегрирующее звено. Уравнение и передаточная функция имеют вид py(t) = x(t), Амплитудно-фазовая частотная характеристика: W(jw) = Переходная и импульсная функции:
h(t) = t, w(t) = 1(t). (3.30)
Такое звено является идеализацией реальных интегрирующих звеньев. Примерами идеальных интегрирующих звеньев могут служить операционный усилитель в режиме интегрирования, гидравлический двигатель, емкость и др.
Дифференцирующие звенья
В звеньях дифференцирующего типа линейной зависимостью Идеальное дифференцирующее звено. Уравнение и передаточная функция имеют вид y(t) = px(t), W(s) = s. (3.31)
Амплитудно-фазовая частотная характеристика:
W(jw) = jw, A(w) = w, y(w) = +900. (3.32)
Переходная и импульсная функции: h(t) = d(t), w(t) = Такое звено является идеализацией реальных дифференцирующих звеньев. Примерами идеальных дифференцирующих звеньев могут служить операционный усилитель в режиме дифференцирования, тахогенератор и др. Форсирующее (дифференцирующее) звено первого порядка. Дифференциальное уравнение и передаточная функция
y(t) = (tp+1) x(t), W(s) = ts+1, (3.34)
где t - постоянная времени дифференцирования. Амплитудно-фазовая частотная характеристика: W(jw) = (jwt + 1), A(w)=
Переходная и импульсная функции: h(t) = 1(t) + td(t), w(t) = d(t) + t Форсирующее (дифференцирующее) звено второго порядка. Уравнение и передаточная функция звена:
y(t) = (t2p2+2xtp+1)x(t), W(s) = t2s2+2xts+1. (3.37)
Амплитудно-фазовая частотная характеристика:
W(jw) = (1-w2t2) + j2xwt,
A(w)= Переходная и импульсная функции: h(t) = t2 Неминимально-фазовые звенья
Неминимально-фазовые звенья - это такие звенья, которые, в отличие от обычных типовых звеньев, при равенстве амплитудных частотных характеристик имеют большие по абсолютному значению фазовые сдвиги. Одной амплитудной частотной характеристике неминимально-фазовых звеньев может соответствовать несколько различных фазовых частотных характеристик. Звено с чистым запаздыванием. Это такое звено, у которого выходная величина повторяет входную с некоторой задержкой во времени. Уравнение и передаточная функция звена: y(t) = x(t-t), где t - время чистого запаздывания. Амплитудно-фазовая частотная характеристика:
Переходная и весовая функции:
h(t) = 1(t-t), w(t) = d(t-t). (3.46)
Разница между этим звеном и безынерционным, как видим, в величине фазы. Амплитудные же характеристики одинаковы. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 2842; Нарушение авторского права страницы





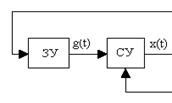
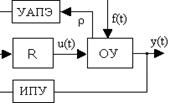




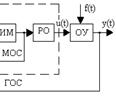
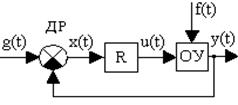
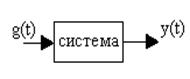
 Рис. 3.9. Классификация типовых динамических звеньев
Рис. 3.9. Классификация типовых динамических звеньев , (3.18)
, (3.18) ,
,  , y(w) = - arctgTw. (3.19)
, y(w) = - arctgTw. (3.19) ), w(t) =
), w(t) = 
 , (3.21)
, (3.21) - новые постоянные времени.
- новые постоянные времени. . (3.23)
. (3.23) , (3.24)
, (3.24) . (3.26)
. (3.26) ,
,  , y(w) = - arctg
, y(w) = - arctg  . (3.27)
. (3.27) связаны в установившемся режиме производная выходной величины и входная величина. В этом случае для установившегося режима будет справедливым равенство
связаны в установившемся режиме производная выходной величины и входная величина. В этом случае для установившегося режима будет справедливым равенство  , откуда и произошло название этого типа звеньев.
, откуда и произошло название этого типа звеньев. . (3.28)
. (3.28) , A(w) =
, A(w) =  , y(w) = -900. (3.29)
, y(w) = -900. (3.29) связаны в установившемся режиме выходная величина и производная входной, откуда и произошло название этого типа звеньев.
связаны в установившемся режиме выходная величина и производная входной, откуда и произошло название этого типа звеньев. . (3.33)
. (3.33) , y(w) = arctg wt. (3.35)
, y(w) = arctg wt. (3.35) , y(w)=arctg
, y(w)=arctg  . (3.38)
. (3.38) +2xt
+2xt  , (3.44)
, (3.44) , А(w) = 1, y(w)= -tw [рад]=
, А(w) = 1, y(w)= -tw [рад]=  tw [угл.град]. (3.45)
tw [угл.град]. (3.45)