|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор программного обеспечения для создания 3D-моделей рукояток
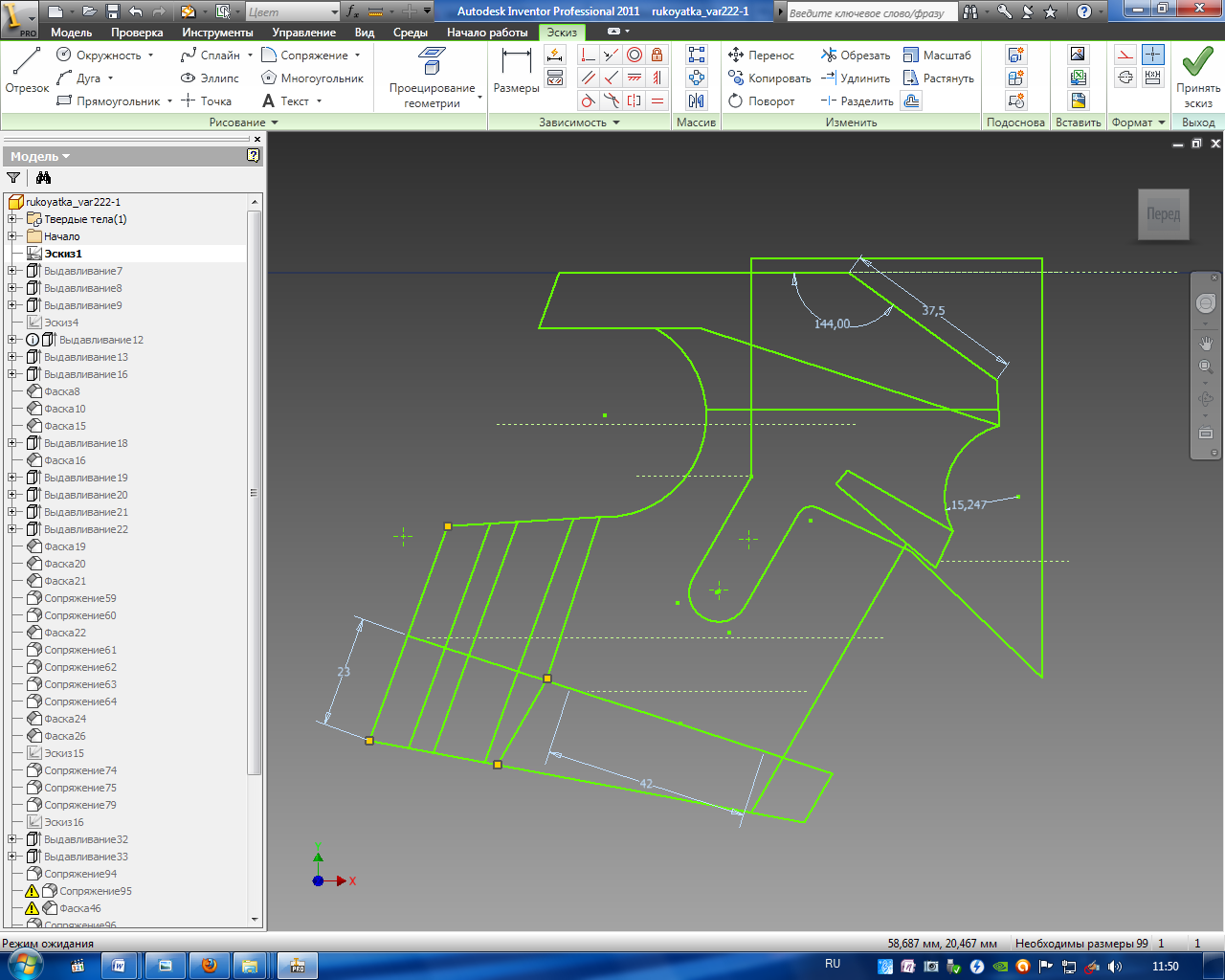
На основе 2 методов второго варианта построения 3D-модели ортопедической рукоятки были определены наиболее подходящие программы: 1 метод Сначала в системе CAD - Autodesk Inventor Professional создали эскиз, опираясь на основные характерные размеры и углы ортопедических рукояток (рисунок 20)
Рисунок 20 - 2D-эскиз рукоятки
Затем выдавливанием и с помощью дополнительных операций создали упрощенную граненую модель рукоятки (рисунок 21)
Рисунок 21 - Упрощенная модель рукоятки
Далее экспортировали модель в программу Topogun, где получили новую полигональную сетку модели для того, чтобы не возникли проблемы при дальнейших операциях в последующих программах (рисунок 22, а, б, в.). Topogun- программа для изменения структуры сетки на основе полигонов(ретопология)
а)
б)
в) Рисунок 22(а, б, в) - Создание новой упрощенной полигональной сетки поверх имеющейся
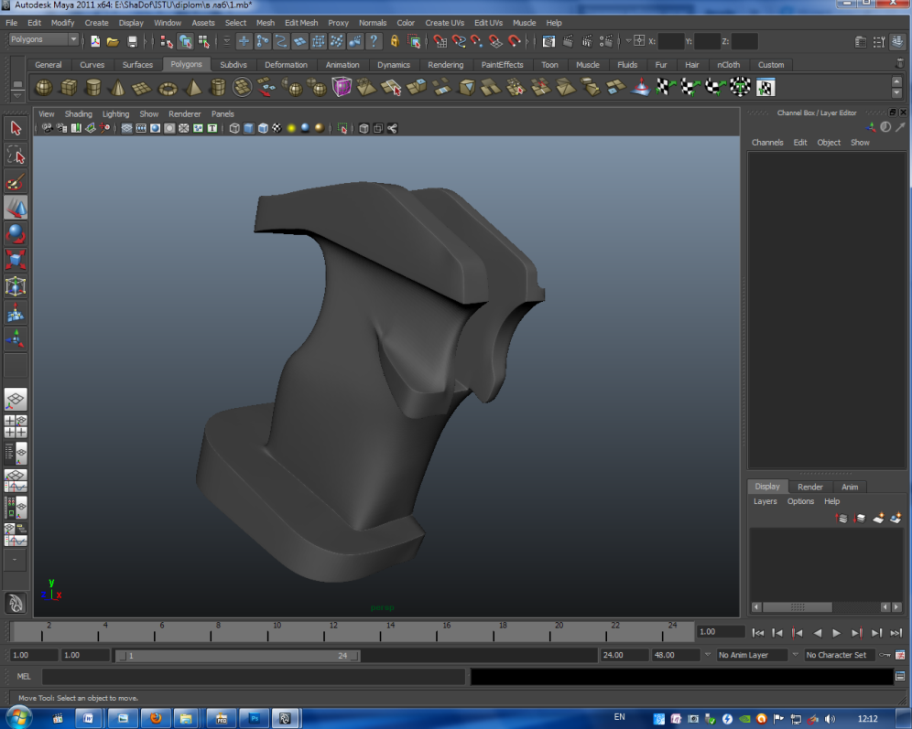
Далее экспортировали новую сетку модели в программу Autodesk Maya, где подчеркнули характерные грани и выступы рукоятки, после чего применив сглаживание (рисунок 23, а, б)
а)
б) Рисунок 23 (а, б) - Обработка рукоятки в Autodesk Maya
На этом этапе модель уже готова. Однако, могут остаться некоторые неровности и места, которые необходимо изменить. Для этого мы использовали программу Pixologic Zbrush, отличительной особенностью которой является возможность скульптинга 3D-моделей при достаточно большом количестве полигонов (рисунок 24)
Рисунок 24 - Сглаживание в среде Pixologic Zbrush В ходе процесса создания модели, опираясь на вышеописанный метод, выявились существенные его недостатки: - Невозможность точно изменить исходные размеры у готовой рукоятки, что обуславливается методом полигонального моделирования. - Использование относительно большого количества программ - Потеря первоначальных размеров под конец моделирования. 2 Метод Сначала сплайнами начертили боковой вид рукоятки в плоскости Z-Y, опираясь на основные размеры (рисунок 25)
Рисунок 25 - Эскиз по основным размерам
Далее сформировали толщину модели, с помощью сплайнов, придающих рукояти характерную и нужную форму (рисунок 26). Очень важно, чтобы смежные сплайны пересекались друг с другом.
Рисунок 26 - Создание сплайнов в плоскости X-Y
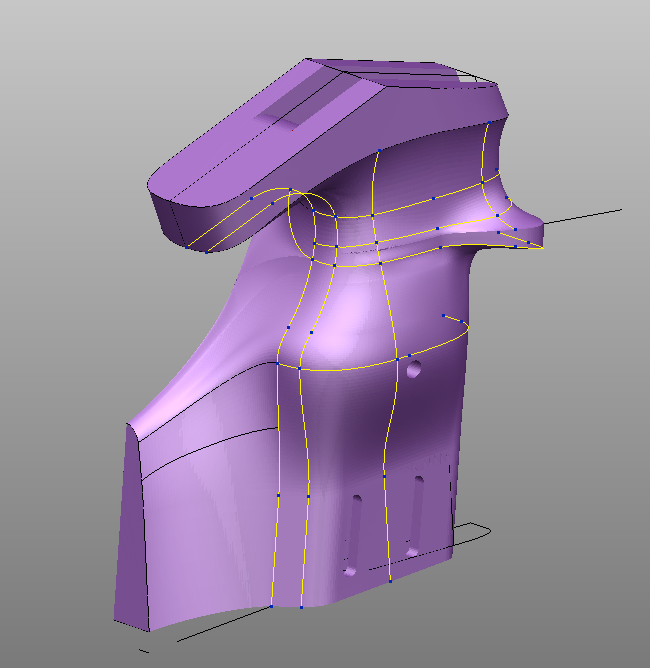
Построив таким образом каркас, была получена surface-поверхность (рисунок 27). Причем общая поверхность на данном этапе состояла из отдельных кусков поверхностей, что обуславливается сложной формой рукоятки
Рисунок 27 - Surface поверхность модели рукоятки Для придания целостности поверхности, сконвертировали surface-поверхность в сетку, которую потом сшили (рисунок 28)
Рисунок 28 - Сшитая сетка
После этих операций сетка оказалась не совсем гладкой и имела некоторые " волнообразные" места. Переместили модель в Zbrush и с помощью специальной виртуальной кисти сгладили поверхность там, где это требовалось.
Далее переместили сглаженную модель в PowerShape и выполнили операции вычитания, для получения паза для рамы и деления рукояти на две половины (рисунок 29)
Рисунок 29 - Готовые части рукоятки
Данный метод оказался существенно эффективнее, быстрее и точнее предыдущего. Благодаря использованию поверхностного моделирования можно изменять форму почти готовой рукоятки. Однако возникает сложность в том, что поверхности образованные пересечением сплайнов, не привязаны к ним, т.е при перемещении контрольных точек сплайнов, поверхность останется на месте и нужно будет каждый раз повторять операцию создания поверхности, изменяя форму сплайнов. Это создает значительное неудобство и повышает трудоемкость проектирования. Изменив сплайны, все последующие операции нужно будет быстро повторить заново (создание surface-поверхности, конвертирование ее в сетку, сшивание, сглаживание и операции вычитания). Учитывая неудобство изменение формы рукоятки в данной программе, была рассмотрена и изучена CAD-система Pro-Engineer. В ней был повторен 2-ой метод и результаты показали, что она является более удобной и подходящей для автоматизированного проектирования ортопедической рукоятки. Здесь поверхности, образованные пересечением сплайнов, привязаны непосредственно к ним, поэтому при изменеиии формы сплайнов не нужно будет повторять операцию создания поверхности.
Таким образом была определена основная программа для создания 3D модели ортопедической рукоятки по размерному ряду - Pro Engineer. В процессе моделирования рукоятки по 1-ому методу, были задействованы еще и такие программы, как Topogun, Autodesk Maya, Pixologic Zbrush, Среди них нет подходящей для создания 3D-моделей рукояток по размерному ряду, однако все они необходимы для моделирования индивидуальной рукоятки: -Topogun - для создания упрощенной полигональной поверхности внутренней стороны ладони кисти в свернутом положении -Autodesk Maya - для получения полигональной модели индивидуальной рукоятки - ZBrush - для сглаживания определенных частей рукоятки, оставляя без изменения определенных участков модели Autodesk Maya и Topogun используются еще и для создания виртуальной модели кисти руки, которая в данном проекте необходима для правильного базирования отсканированных моделей кистей рук. В дальнейшем, программы, используемые для определенных операций, могут изменяться по причине их углубленного изучения. Это может повлиять на уменьшение количества используемых программ.
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1531; Нарушение авторского права страницы