|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Этапы создания трехмерной модели ортопедической рукоятки по размерному ряду.
Для моделирования рукояток по размерному ряду необходимо создать рукоятку среднего размера с управляющим эскизом, который позволит подстраивать модель под оставшиеся типы размеров. Для решения этих задач был определен метод получения 3D-модели рукоятки среднего размера, последовательность выполнения этапов которого представлена на рисунке 30:
1.Создание отливок кистей рук
2.Сканирование отливок кистей рук в выпрямленном и согнутом положениях
3.Создание упрощенной виртуальной модели кисти руки
4.Совмещение виртуальной модели кисти со сканированной в согнутом положении
5.Сворачивание виртуальной модели кисти руки
6.Базирование кисти руки относительно предплечья в соответствии с правильным ее положением при удержании оружия 7.Выведение общей формы рукоятки и присваивание сплайнов определенным параметрам ладони
8.Создание управляющего 2D-эскиза и построение на его основе модели рукоятки среднего размера
Рисунок 30 - Последовательность выполнения этапов 1.Создание отливок рук Чтобы получить достоверную поверхность внутренней части ладони, определяющая форму рукоятки, были сделаны отливки нескольких рук среднего размера из гипса, которые затем сканировались для получения 3D-моделей. Для получения отливок использовалась специальная альгинантная слепочная масса. Альгинаты относятся к эластичным слепочным материалам. Сырьем для получения альгинатов являются морские водоросли. Порошок альгинатного материала содержит натриевые или калиевые соли альгиновой кислоты (15 %), которые хорошо растворимы в воде, сульфат кальция (около 12 %), фосфат натрия – замедлитель схватывания (2 %) Порошок замешивался в воде в определенных пропорциях, после чего опускалась рука в смесь на 2-3 минуты. В течении этого промежутка времени материал отверждается и внутри образуется полость, повторяющая форму ладони (рисунок 31)
Рисунок 31- Полость, повторяющая форму ладони В полость заливается гипсовый раствор, который спустя 30-40 минут отвердевает (рисунок 32).
Рисунок 32 - Гипсовый раствор, залитый в полость
Слепочный материал разрушается (рисунок 33) и достается готовая отливка согнутой руки (рисунок 34)
Рисунок 33 - Процесс разрушения альгинантной массы
Рисунок 34 - Готовая отливка кисти в согнутом положении 2. Сканирование отливок кистей рук в выпрямленном и согнутом положениях После получения отливок они сканировались (рисунок 35), получая тем самым их 3D- модели (рисунок 36). Также был сделан скан прямой ладони среднего размера для последующего создания виртуальной модели кисти.
Рисунок 35 - Сканирование отливки руки в согнутом положении
а) б) Рисунок 36 - 3D-модели кистей рук а - в согнутом положении; б - в выпрямленном положении 3. Создание упрощенной виртуальной модели кисти руки. Условия при создании отливки и свойства слепочного материала не позволяли в достаточной мере захватить область предплечья, которое ни в коем случае нельзя игнорировать для правильного базирования отсканированных моделей. Поэтому на основе скана прямой руки среднего размера, где захвачена область предплечья, была смоделирована виртуальная модель кисти посредством упрощения сетки в программе Topogun (рисунок 37)
Рисунок 37 - Создание упрощенной полигональной сетки отсканированной модели
Особое внимание при создании сетки уделялось расположению полигонов таким образом, чтобы в местах сгиба пальцев и на очевидных складках располагались грани полигонов. Это повлияет на качество сворачивания кисти модели в дальнейшем Далее модель экспортировалась в среду Autodesk Maya, где был создан виртуальной скелет (рисунок 38) опираясь на анатомические особенности строения кисти рук. Особенное внимание уделялось расположению точки, соответствующей месту лучезапястного сустава. Точное ее положение обеспечит правильное положение кисти руки относительно предплечья при хвате
Рисунок 38 - Создание скелета виртуальной модели кисти Затем выполнялось присваивание (скиннинг) скелета к упрощенной модели. Каждая кость отвечает за определенную группу полигонов, которая находится рядом с ней. По умолчанию программа делает скиннинг неправдоподобным, поэтому для получения хорошего результата надо было вручную обработать каждую кость, присвоив им соответствующие полигоны (рисунок 39)
Рисунок 39 - Присваивание скелета к упрощенной модели кисти руки
Таким образом была создана виртуальная модель кисти руки среднего размера с возможностью задания ей необходимого положения.
4. Совмещение виртуальной модели руки со сканированной в согнутом положении Следующий этап для получения положения правильной хватки - это совмещение упрощенной выпрямленной модели руки среднего размера со сканированной моделью той же руки в согнутом положении (рисунок 40)
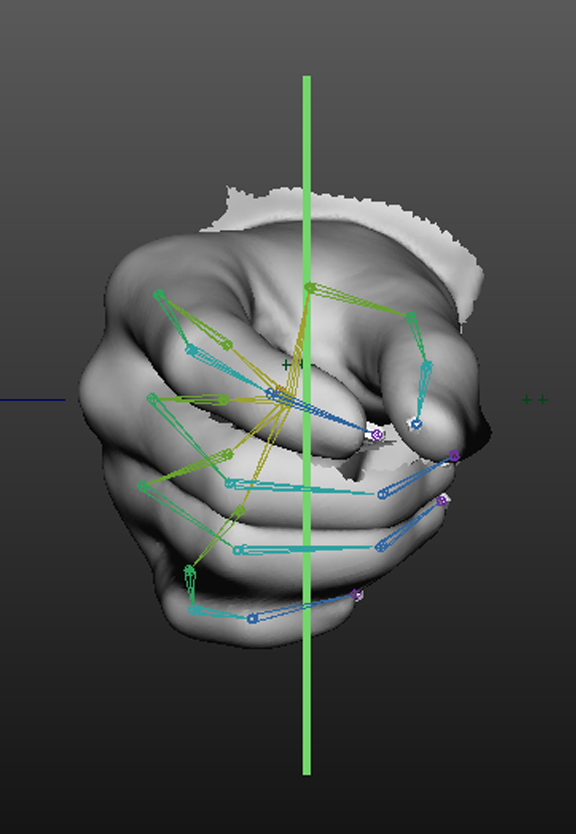
Рисунок 40 - Совмещение 5.Сворачивание виртуальной модели кисти руки Две модели снова переносятся в программу Maya, где виртуальная сворачиванием принимает положение согнутой (рисунок 41). Благодаря совмещению моделей, достигнуто анатомически правильное положение согнутой кисти руки я Рисунок 41 - Сворачивание виртуальной модели кисти руки Затем к уже самому скану привязывается скелет (рисунок 42), после чего начинается самый важный процесс - базирование кисти.
Рисунок 42 - Привязка сканированной модели к виртуальному скелету 6.Базирование кисти руки в соответствии с правильным ее положением при удержании оружия. Для правильного базирования была смоделирована рама пистолета на основе чертежа, определено расстояние от рамы до спускового курка, помеченное углом полигона. На рисунке 43 видно положение кисти руки относительно предплечья без его изменения
Рисунок 43 - Положение кисти руки относительно предплечья без его изменения Благодаря созданию виртуальной модели кисти, где основная вертикальная ось лучезапястного сустава расположена точно вертикально, и где наглядно видно положение предплечья относительно кисти, можно виртуально смоделировать правильное положение руки при удержании оружия. Поэтому были проведены следующие операции: 1) Форма рукоятки изготавливается такой, чтобы основная (вертикальная) ось лучезапястного сустава была почти вертикальна (рисунок 44, а), а плоскость симметрии пистолета, проходящая через ось канала ствола и центр масс, располагалась левее середины лучезапястного сустава (ее оси) на 4-6 мм (рисунок 44, б).
а) б) Рисунок 44 а, б- Положение кисти руки относительно предплечья
2) Следует иметь в виду, что степень свободы наклона кисти у стрелков может быть различной, в зависимости от развития и эластичности связочного аппарата. Поэтому, полагаясь на практику лучших стрелков, при определении степени наклона кисти вниз нужно исходить из того, что между направлением ствола при изготовке и его направлением при наклоне кисти до отказа угол должен быть в пределах: для матчевого пистолета - 5-7°, для пневматического пистолета - 7-12°, для револьвера - 11-14° (рисунок 45).
Учитывая это был определен угол наклона кисти (рисунок 46)
Рисунок 46 - Угол наклона кисти руки 3) Правильным считается положение вторых фаланг среднего и безымянного пальцев, перпендикулярное к плоскости, проходящей через ось канала ствола и середину рукоятки (рисунок 47, а). Указательный палец накладывается на спусковой крючок третьей фалангой (рисунок 47, б). Место касания от середины " подушечки" фаланги до сгиба между второй и третьей фалангами. Оно зависит от усилия спуска и длины указательного пальца стрелка.
а) б) Рисунок 47 а, б - Положение кисти руки относительно предплечья
4) Большой палец выпрямлен и направлен вдоль пистолета (рисунок 48). При таком положении он создает хорошую опору рукоятки с левой стороны при наличии на рукоятке опорной площади для него (или небольшого выступа) вместе со средним пальцем образует замкнутое кольцо, которое создает четкую фиксацию рукоятки.
Рисунок 48 - Положение большого пальца
Таким образом приведена модель скана в наиболее правильное положение кисти при удержании пистолета. Теперь можно определить общую форму рукоятки.
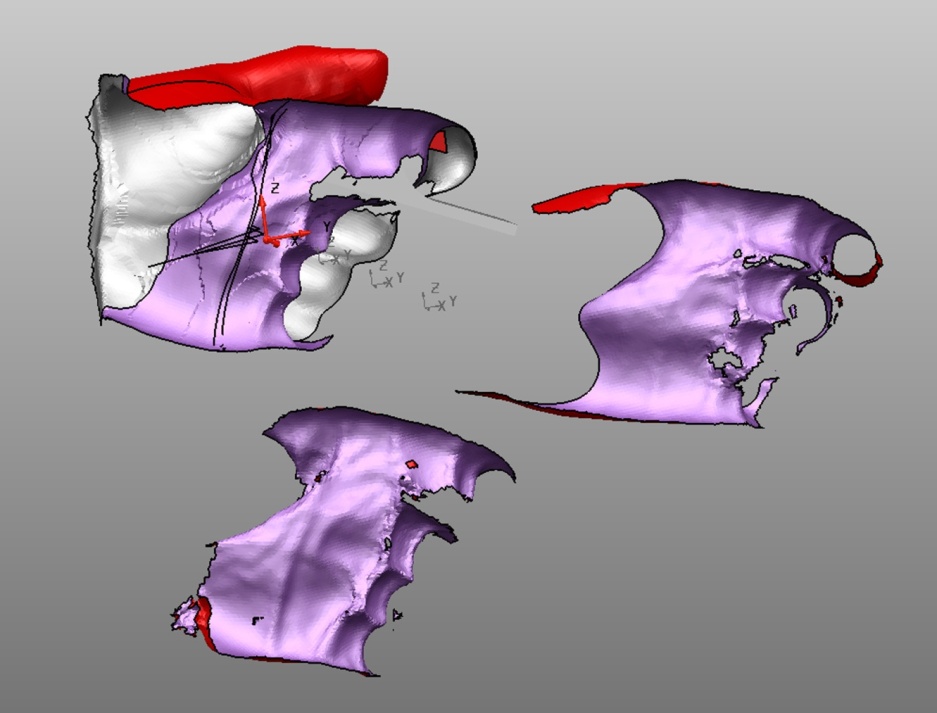
7.Определение формы рукоятки Для наиболее точного определения формы рукоятки были совмещены несколько сканированных моделей рук среднего размера (рисунок 49). На виде сбоку и сзади были определены основные отрезки, отвечающие за определенные параметры ладони.(рисунок 50) Именно они в дальнейшем будут изменятся для достижения формы рукоятки нужного размера
Рисунок 49 - Совмещение нескольких сканированных моделей кистей рук в согнутом положении
Рисунок 50 - Определение отрезков, отвечающие за определенные параметры ладони
Далее находилась форма рукоятки по сплайнам, наложенным на поверхность кисти каждой руки. На основе нескольких сплайнов был создан один общий, который и определил среднюю форму в рассматриваемом участке кисти руки (рисунок 51)
Рисунок 51 - Определение формы рукоятки
8.Построение 3D-модели рукоятки Построение модели рукоятки начинается с определения эскиза рамы пистолета, относительно которого строится управляющий 2D-эскиз рукоятки (рисунок 52)
Рисунок 52 - Построение управляющего 2D-эскиза рукоятки среднего размера
После построения основного 2D-эскиза, строилась база для регулирования толщины рукоятки, состоящая из отрезков, проведенных перпендикулярно 2D-эскизу (рисунок 53)
Рисунок 53 - Построение базы, отвечающая за регулирование толщины рукоятки
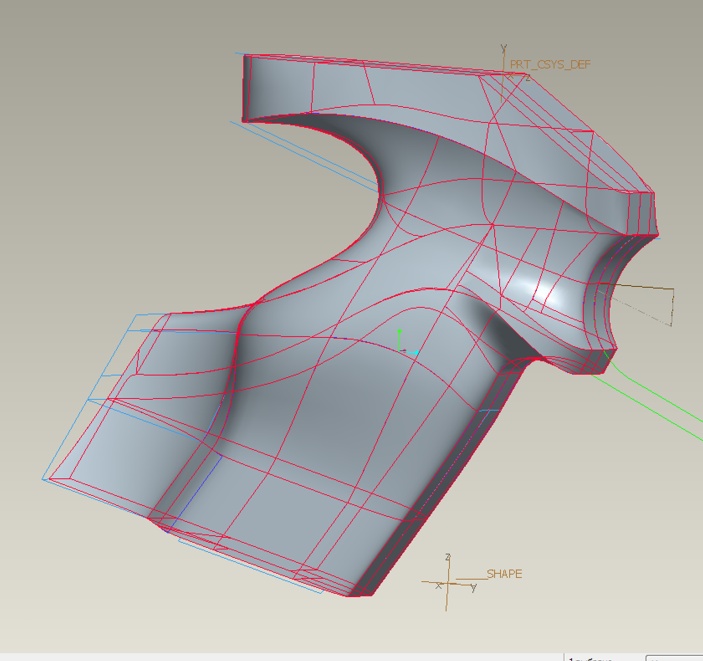
Следующий этап в построении модели- создание сплайнов, задающих форму рукоятки, точки которых привязаны к отрезкам в 2D-эскиза (рисунок 54)
Рисунок 54 - Создание сплайнов, задающих форму рукоятки
Получив необходимую форму рукоятки, моделируются вспомогательные элементы, с помощью которых будут получены необходимые пазы и отверстия под винты (Рисунок 55)
Рисунок 55 - Моделирование вспомогательных элементов
Последний шаг в создании рукоятки - вычитание из модели рукоятки вспомогательных элементов, получая при этом необходимые пазы и отверстия под винты (рисунок 56)
Рисунок 56 - Приведение модели рукоятки в окончательный вид Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1307; Нарушение авторского права страницы