
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методы переменных состояния. Случайные марковские модели
Среди наиболее конструктивных стохастических моделей являются модели диффузионного типа, в частности модели марковских процессов. В отличие от теории марковских цепей, где рассматривается математические модели в виде функций или плотностей распределения вероятностей в теории марковских процессов модели представляют сами состояния. Такой марковский процесс, включающий случайную и детерминированную компоненты, представим в виде
где
Кроме такого интегрального, часто используется и представление дифференциальным уравнением состояния:
где
Для случайного поля состояние В рассматриваемом методе моделирования динамических систем называемом методом переменных состояния, не исключается, наоборот, широко используются также результаты теории вероятностей и математической статистики. Так, два состояния марковского процесса
где В соответствии с теоремой Дуба случайный процесс, представимый уравнением состояния (7.18), относится к классу марковских. Часто уравнение (7.18) называют уравнением формирующего фильтра. На основе уравнения состояния (7.18) может быть составлен алгоритм формирования процесса
Рис. 7.5. Алгоритм формирования процесса
На рисунке 7.6 представлена структура данного алгоритма.
Рис.7.6. Алгоритм формирования дискретного процесса
Данная схема алгоритма будет использоваться при проведении лабораторных работ № 1, 2 и 3. На основе реализации представления эргодического стандартного процесса в пространстве состояний
Рис. 7.7. Представление процесса в пространстве состояний а) и плотностью распределения б)
Процесс Перечисленные и многие другие представления оказываются полезными для решения тех или иных стохастических систем. В то же время модели в пространстве состояний несомненно являются более общими, полными и адекватными представлениями, поскольку отображают состояние всей системы, а не только ее части в виде вероятностных характеристик и позволяет получать адекватные конструктивные модели не только случайных процессов и полей, но и величин. При решении реальных задач, где свойства динамического процесса не важны, обычно используют предположения о стационарности и эргодичности, что позволяет применять результаты теории вероятностей, а сам процесс – редуцировать к случайной величине. В тех же задачах, где динамика процесса принципиально слажена (управление, сопровождение, переходные явления и др.) гипотеза эргодичности не работает. На практике широко используется предположение о марковости процесса (7.19). Важным достоинством марковских моделей (7.17) и (7.18) является возможность получения адекватных моделей для динамических, в том числе нестационарных, случайных объектов. Достаточно хорошо разработанная прикладная математика для марковских процессов позволяет получать оптимальные оценки
Очевидно состояние системы, определяемой уравнением (7.18), постоянно во времени. Случайность такой системы состоит в неизвестном значении самого состояния и наличии шумов наблюдения (измерения)
где Уравнение наблюдения можно интерпретировать как самостоятельную модель типа «вход/выход» или «черный ящик» (рис. 7.8). Что же касается модели состояния (7.19), то она уже не укладывается в рамки черного ящика из-за различий в конкретизации внутренней структуры самой системы, возможной нелинейности, нестационарности, распределенности. Следует заметить, что адекватной моделью ТКС может быть только
Рис. 7.8. Структура модели наблюдения
Учитывая то, что ТКС представляет собой сложную организационно-техническую систему, для нее не удается подобрать какой-либо одной общей математической модели. Множество моделей отображает различные функциональные свойства на уровне элементов, сети, предоставления услуг, бизнес-процессов. Целенаправленность ТКС определяется управлениями на каждом из уровней в соответствии с принятыми критериями оптимальности или же критериями достижимости (например, достижимости уровня качества обслуживания). На практике редко встречаются чисто детерминированные или чисто случайные системы. Детерминированные модели весьма удобные для анализа и синтеза: здесь широко разработанный и относительно простой математический аппарат, имеется возможность представлений во временной и в частотной областях для линейных моделей. При использовании стохастических моделей – иная процедура дифференциальных и интегральных преобразований, кроме того необходимо четко определиться: какой конкретно моделью следует аппроксимировать данную систему – случайным процессом или случайной величиной.
Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 585; Нарушение авторского права страницы
 , (7.17)
, (7.17) - регулярная постоянная составляющая;
- регулярная постоянная составляющая;  - регулярно изменяемая (например – синусоидальная) компонента, описываемая обычным интегралом Лебега;
- регулярно изменяемая (например – синусоидальная) компонента, описываемая обычным интегралом Лебега;  - случайно изменяемая компонента, порожденная винеровским процессом
- случайно изменяемая компонента, порожденная винеровским процессом  , описываемая интегралами Ито или Стратоновича.
, описываемая интегралами Ито или Стратоновича. , (7.18)
, (7.18) - коэффициент состояния процесса
- коэффициент состояния процесса  численно равный обратной величине интервала корреляции этого процесса
численно равный обратной величине интервала корреляции этого процесса  ;
;  - коэффициент генерации,
- коэффициент генерации,  , определяющий уровень случайно изменяющейся компоненты;
, определяющий уровень случайно изменяющейся компоненты;  - гауссов белый шум (ГБШ), (порождающий процесс). Стандартный ГБШ является
- гауссов белый шум (ГБШ), (порождающий процесс). Стандартный ГБШ является  -коррелированным процессом с нулевым средним и единичной спектральной плотностью мощности (СПМ).
-коррелированным процессом с нулевым средним и единичной спектральной плотностью мощности (СПМ). -размерным вектором, а коэффициенты
-размерным вектором, а коэффициенты  и
и  - матрицы, недиагональные элементы которых определяют уровни взаимных связей между компонентами системы
- матрицы, недиагональные элементы которых определяют уровни взаимных связей между компонентами системы  .
. и
и  связаны между собой переходной плотностью вероятностью:
связаны между собой переходной плотностью вероятностью:  (7.19)
(7.19) - вероятность перехода из состояния в момент времени
- вероятность перехода из состояния в момент времени  , в состояние момента
, в состояние момента  ,
,  .
. . Источником, генератором процесса
. Источником, генератором процесса 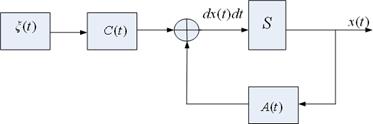
 Такой алгоритм (формирующий фильтр) может быть представлен и в дискретном виде, что является более естественно для практической реализации на ЭВМ, где имеется стандартная процедура получения гауссового белого шума:
Такой алгоритм (формирующий фильтр) может быть представлен и в дискретном виде, что является более естественно для практической реализации на ЭВМ, где имеется стандартная процедура получения гауссового белого шума:  (7.20)
(7.20)
 , то последовательность
, то последовательность  можно рассматривать как статическую выборку. По данной выборке можно построить гистограмму и аппроксимировать е кривой плотности распределения.
можно рассматривать как статическую выборку. По данной выборке можно построить гистограмму и аппроксимировать е кривой плотности распределения.
 и
и  не зависят от времени, и наоборот: для нестационарного процесса эти коэффициенты являются функциями времени (7.18). Динамика, в том числе нестационарная, адекватно моделируется дифференциальными или разностными уравнениями в пространстве состояний, в то время как при представлении плотности распределения – проблематично.
не зависят от времени, и наоборот: для нестационарного процесса эти коэффициенты являются функциями времени (7.18). Динамика, в том числе нестационарная, адекватно моделируется дифференциальными или разностными уравнениями в пространстве состояний, в то время как при представлении плотности распределения – проблематично. , используя фильтры Калмана или Стратоновича, находить оптимальные алгоритмы управления, используя принцип двойственности с алгоритмами оценки и теорему о разделении алгоритмов стохастического управления; синтезировать различные процедуры обработки случайных сигналов, аппроксимируемых широким спектром моделей: случайных величин, процессов или полей. Так, для случайной величины
, используя фильтры Калмана или Стратоновича, находить оптимальные алгоритмы управления, используя принцип двойственности с алгоритмами оценки и теорему о разделении алгоритмов стохастического управления; синтезировать различные процедуры обработки случайных сигналов, аппроксимируемых широким спектром моделей: случайных величин, процессов или полей. Так, для случайной величины  уравнение состояния (7.18) вырождается:
уравнение состояния (7.18) вырождается:  . (7.21)
. (7.21) , входящих в уравнение наблюдения
, входящих в уравнение наблюдения , (7.22)
, (7.22) - матричный коэффициент, элементы которого
- матричный коэффициент, элементы которого  являются ничем иным, как переходными влияниями при измерениях. Кроме того они определяют сдвиг и масштаб наблюдаемого процесса
являются ничем иным, как переходными влияниями при измерениях. Кроме того они определяют сдвиг и масштаб наблюдаемого процесса  -мерное случайное поле
-мерное случайное поле  , где взаимные связи
, где взаимные связи  определяют главные свойства (целостность, эмерджентность) этой сложной организационно-технической системы. При этом указанные взаимные связи
определяют главные свойства (целостность, эмерджентность) этой сложной организационно-технической системы. При этом указанные взаимные связи  и
и  образованная в силу зависимых измерений, например при наличии переходных влияний, которые учитываются недиагональными элементами
образованная в силу зависимых измерений, например при наличии переходных влияний, которые учитываются недиагональными элементами 