|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Экскаваторы одноковшовые (лабораторная работа №5)Стр 1 из 9Следующая ⇒
Оглавление Введение 4 1. Экскаваторы одноковшовые (лабораторная работа №5) 5 1.1. Назначение 5 1.2. Классификация 6 1.3. Индексация 6 1.4. Конструкция 8 1.4.1. Экскаваторы с гибкой подвеской рабочего оборудования 8 1.4.2. Экскаваторы с гидравлическим приводом 11 1.4.3. Экскаваторы с телескопическим рабочим оборудованием 17 1.5. Автоматизация процессов работы экскаваторов 20 2. Скреперы (лабораторная работа №6) 21 2.1. Назначение 21 2.2. Классификация 21 2.3. Конструкция 23 2.4. Автоматизация планировочных работ 24 2.5. Схемы движения скреперов 26 3. Бульдозеры (лабораторная работа №7) 29 3.1. Назначение 29 3.2. Классификация 30 3.3. Конструкция 30 3.4. Автоматизация процессов работы бульдозеров 32 3.5. Машины для подготовительных и планировочных работ 34 4. Механизированное уплотнение грунтов дорожных насыпей (лабораторная работа №8) 39 4.1. Общие сведения 40 4.2. Классификация средств уплотнения 40 4.3. Уплотнение катками 40 4.4. Уплотнение трамбующими и вибротрамбующими машинами 45 4.5. Уплотнение вибрационными машинами 47 5. Лабораторные упражнения и контроль усвоения материала 48 Библиографический список 48
Введение
Земляные работы являются одной из наиболее важных составных частей технологического комплекса работ, выполняемых при строительстве железной дороги, и составляют по трудоемкости и стоимости 25…30% общих затрат на ее сооружение. Работы по возведению земляного полотна выполняются механизированными колоннами, оснащенными машинами для производства подготовительных, основных и укрепительных работ. Составы парков типовых мехколонн формируются на основе модульного принципа. Экскаваторы, скреперы и бульдозеры являются ведущими машинами в соответствующих модулях и определяют их производительность. В состав модулей входят также комплектующие машины и механизмы, производительность которых увязывается с производительностью ведущих машин. Для понимания условий и особенностей применения отдельных типов машин, грамотного выбора механизированных модулей будущие инженеры – строители путей сообщения должны иметь всесторонние и прочные знания, касающиеся устройства, области рационального использования, индексации, классификации строительных машин и механизмов, задействованных на сооружении земляного полотна. Данные методические указания помогут студентам получить более полные знания в области механизации земляных работ, окажут помощь при выполнении лабораторных работ № 5, 6, 7, 8, приведенных в «Сборнике лабораторных работ» по дисциплине «Технология, механизация и автоматизация железнодорожного строительства», и подготовке к их защите. Экскаваторы одноковшовые (лабораторная работа №5)
Цель работы: ознакомление с назначением, классификацией, индексацией, конструкцией одноковшовых строительных экскаваторов, путями повышения производительности работ, проектированием забоев, элементами автоматизации экскаваторных работ.
Назначение Экскаватором называют землеройную машину, выполняющую операции по отделению грунта от массива и перемещению его в отвал или транспортные средства в пределах зоны досягаемости рабочего оборудования. Экскаваторы оборудуют одним или несколькими ковшами. В первом случае их называют одноковшовыми, во втором – многоковшовыми. По назначениюодноковшовые экскаваторы делят на строительные – для выполнения земляных работ, погрузки и разгрузки сыпучих материалов; строительно-карьерные – для выполнения работ по назначению строительных экскаваторов, а также для разработки карьеров строительных материалов и добычи полезных ископаемых открытым способом; карьерные – для работы в карьерах; вскрышные – для снятия верхнего слоя грунта или горной породы перед карьерной разработкой; туннельные и шахтные – для работы под землей при строительстве подземных сооружений и разработке полезных ископаемых. Одноковшовый экскаватор может иметь только один вид рабочего оборудования или комплектоваться его сменными видами, устанавливаемыми на машину в зависимости от выполняемых работ. В первом случае экскаваторы называют специальными, а во втором – универсальными. К последним относятся большинство строительных экскаваторов. Используемые на массовых разработках горных пород открытым способом специальные карьерные экскаваторы имеют только один вид рабочего оборудования – прямую лопату. Вскрышные экскаваторы имеют одинаковую с карьерными машинами базу и отличаются от последних главным образом размерами рабочего оборудования - ковшом большей вместимости, увеличенным его вылетом - расстоянием от оси вращения экскаватора до центра массы ковша. Это позволяет более полно использовать энергетические параметры силовой установки, прочностной ресурс машины и другие характеристики с целью получения наибольшей производительности на разработке вскрышных грунтов, менее прочных по сравнению с залегающей под ними горной породой. Для работы в карьерах широко применяют мощные шагающие драглайны, которые используют как на погрузке взорванной породы, так и на вскрышных работах. Карьерные и вскрышные экскаваторы, а также шагающие драглайны относятся к горным машинам. Однако их широко используют на строительстве крупных земляных сооружений, например плотин, дамб, водохранилищ, каналов и т. п. В нашей стране примерно 90% одноковшовых экскаваторов являются универсальными строительными машинами с ковшами вместимостью 0, 25…2, 5м3, оснащенными различными видами сменного рабочего оборудования. Экскаваторы данного типа предназначены для земляных работ в грунтах I…IV категорий. С помощью унифицированного сменного рабочего оборудования (до 40 видов) они могут выполнять также погрузочно-разгрузочные, монтажные, сваебойные, планировочные и другие работы. Рабочий цикл одноковшового экскаватора при разработке грунтов состоит из следующих последовательно выполняемых операций: копание грунта (заполнение ковша грунтом), подъем ковша с грунтом из забоя, поворот ковша к месту разгрузки, разгрузка грунта из ковша в отвал или в транспортные средства, поворот порожнего ковша к забою и опускание его в исходное положение для следующей операции копания. В процессе работы отдельные операции цикла можно совмещать (например, подъем или опускание ковша с поворотом его в забой), что позволяет сокращать продолжительность цикла. Приведенные ниже сведения касаются одноковшовых строительных универсальных экскаваторов.
Классификация Одноковшовые строительные экскаваторы классифицируют по следующим признакам: по типу ходового устройства – гусеничные с нормальной и увеличенной опорной поверхностью гусениц, пневмоколесные, на специальном шасси автомобильного типа, на шасси грузового автомобиля или трактора; по типу привода – с одномоторным (механическим и гидравлическим) и многомоторным (гидравлическим и электрическим) приводом; по исполнению опорно-поворотного устройства – полноповоротные (угол поворота рабочего оборудования в плане не ограничен) и неполноворотные (угол поворота рабочего оборудования в плане ограничен 270°); по способу подвески рабочего оборудования – с гибкой подвеской на канатных полиспастах и с жесткой подвеской с помощью гидроцилиндров; по виду исполнения рабочего оборудования – с шарнирно-рычажным и телескопическим рабочим оборудованием. Кроме перечисленных признаков строительные экскаваторы отличаются между собой размерами, массой, мощностью и вместимостью ковшей. К основным параметрам одноковшовых экскаваторов относятся вместимость ковша, продолжительность рабочего цикла, радиусы копания и выгрузки, высота и глубина копания, высота выгрузки, преодолеваемый экскаватором уклон пути, конструктивная и эксплуатационная массы машины, среднее давление на грунт у гусеничных машин и нагрузка на одно ходовое колесо у пневмоколесных, колея и база ходового устройства. Индексация
Действующая система индексации предусматривает следующую структуру индекса (рис. 1.1), дающего более полную характеристику эксплуатационных возможностей машины. Буквы ЭО означают – экскаватор одноковшовый универсальный. Четыре основные цифры индекса последовательно означают: размерную группу машины, тип ходового устройства, конструктивное исполнение рабочего оборудования (вид подвески) и порядковый номер данной модели. Восемь размерных групп экскаваторов обозначаются цифрами с 1 по 8. Размер экскаватора характеризуют масса машины и мощность основного двигателя, а также геометрическая вместимость основного ковша. В настоящее время выпускаются экскаваторы 2…6-й размерной групп. В стандартах на экскаваторы для каждой размерной группы обычно приводятся несколько вместимостей ковшей – основного и сменных повышенной вместимости, причем для последних предусмотрены меньшие линейные параметры и более слабые грунты, чем при работе с основным ковшом. Основным считается ковш, которым экскаватор может разрабатывать грунт IV категории на максимальных линейных рабочих параметрах (глубина и радиус копания, радиус и высота выгрузки и т.п.). Вместимость основных ковшей экскаваторов составляет: для 2-й размерной группы – 0, 25…0, 28м3; 3-й – 0, 4…0, 65м3; 4-й – 0, 65…1м3; 5-й –1…1, 6 м3; 6-й – 1, 6…2, 5 м3; 7-й – 2, 5…4 м3. Тип ходового устройства указывается цифрами с 1 по 9: 1-гусеничное (Г); 2 – гусеничное уширенное (ГУ); 3 – пневмоколесное (П); 4 – специальное шасси автомобильного типа ( СШ ); 5 – шасси грузового автомобиля (А); 6 – шасси серийного трактора (Тр); 7 – прицепное ходовое устройство (Пр); 8, 9 – резерв. Конструктивное исполнение рабочего оборудования указывается цифрами: 1 – с гибкой подвеской, 2 – с жесткой подвеской, 3 – телескопическое. Последняя цифра индекса означает порядковый номер модели экскаватора. Первая из дополнительных букв после цифрового индекса (А, Б, В и т. д.) означает порядковую модернизацию данной машины, последующие – вид специального климатического исполнения (С или ХЛ – северное, Т – тропическое, ТВ – для работы во влажных тропиках). Например, индекс ЭО-5123ХЛ расшифровывается так: экскаватор одноковшовый универсальный, 5-й размерной группы, на гусеничном ходовом устройстве, с жесткой подвеской рабочего оборудования, третья модель в северном исполнении. Экскаватор оборудуется основным ковшом вместимостью 1, 0 м3, соответствующим 5-й размерной группе, и сменными вместимостью 1, 25 и 1, 6 м3.
Рис. 1.1. Структура индексов одноковшовых универсальных экскаваторов
Конструкция Назначение Скреперы предназначены для послойного копания грунтов в материковом залегании, их транспортирования и отсыпки с планированием слоями определенной толщины. Скреперы применяют для разработки талых грунтов I – IV категорий, в том числе с каменистыми включениями крупностью до 300 мм при емкости ковшей меньше 6 м3, и до 600 мм при емкости ковшей 6 м3 и более. При необходимости грунт предварительно разрыхляется. Скреперы применимы на горизонтах выше уровня грунтовых вод. В липких и переувлажненных грунтах работа скрепера малопроизводительна вследствие налипания грунта на днище и стенки ковша. На заболоченных грунтах они неработоспособны. В сухих и сыпучих песках скреперы загружаются в пределах 60…70% геометрической емкости. Прицепные скреперы к гусеничным тракторам, обладающие достаточно высокой проходимостью, способны работать в плохих дорожных условиях, однако, в связи с низкими транспортными скоростями этих машин (не более 10…15 км/ч) экономически целесообразная дальность перемещения грунта находится в диапазоне не превышающем 500…800 метров. Самоходные скреперы характеризуются более высокими мобильностью, маневренностью, транспортными скоростями (до 50 км/ч) и производительностью в 1, 5…2, 5 раза выше, чем у прицепных машин той же вместимости. Они эффективны при дальности транспортирования грунта до 5000 метров.
Классификация Скреперы классифицируют: по способу агрегатированияс тяговыми средствами – прицепные, предназначенные для тракторной тяги, (используют промышленные тракторы), полуприцепные – сочетание одноосного тягача и скреперного полуприцепа (они отличаются высокой маневренностью и рабочей скоростью), самоходные – постоянно скомпонованные машинные агрегаты, состоящие из одноосного тягача и скреперного устройства, которое у тяжелых самоходных скреперов имеет самостоятельный привод на ходовые колеса; по вместимости ковша – машины малой (до 5 м3), средней (5…15м3) и большой (свыше 15 м3) вместимости; по способу загрузки ковша – с загрузкой движущим усилием, когда срезание грунта осуществляется ножами скрепера, с принудительной (активной) загрузкой с помощью скребкового элеватора 14 (рис. 2.2, г) или иного аналогичного устройства, подающего грунт в заднюю часть ковша. Скреперы второго типа несколько тяжелее обычных (на 17…20%) и имеют меньшую транспортную скорость, но при этом во время загрузки работают без толкачей;
Рис. 2.1. Схема разгрузки ковшей скреперов: а – свободная передняя; б – то же, задняя; в – полупринудительная передняя; г – то же, донная; д - принудительная
по способу разгрузки ковша –со свободной (самосвальной) разгрузкой вперед или назад, с полупринудительной разгрузкой, передней или донной, с принудительной разгрузкой ковша в сторону выгрузки (рис 2.1). Свободную (самосвальную) разгрузку опрокидыванием ковша вперед при открытой заслонке применяют на прицепных скреперах с ковшами малой вместимости (до 5 м3). На прицепных одноосных скреперах средней вместимости, работающих на отсыпке насыпей «с головы», а также на обратной засыпке ям, траншей применяют свободную разгрузку с опрокидыванием ковша назад. В этом случае ковш дополнительно оборудуют задней заслонкой. Недостатком этих схем является неполная разгрузка ковшей из-за налипания грунта на их внутренние поверхности, в связи с чем уменьшается геометрическая вместимость ковшей и, как следствие, снижается производительность скреперов. На машинах с канатным управлением применяют полупринудительную разгрузку, осуществляемую поворотом днища и задней стенки ковша, выполненных как одно целое, при неподвижных боковых стенках. Эти схемы обеспечивают лучшее опорожнение ковшей за счет частичного соскребания поворачивающимся днищем налипшего на боковые стенки грунта. Современные скреперы оборудуют устройствами для принудительной разгрузки путем вытеснения грунта из ковша перемещающейся вперед с помощью гидроцилиндров задней стенкой. В конце рабочего хода задняя стенка своими кромками полностью очищает боковые стенки и днище ковша от налипшего грунта; по способу управления – с канатно-блочным (механическим), гидравлическим и электрогидравлическим управлением. Выпускаемые в настоящее время скреперы имеют гидравлическую или электрогидравлическую систему управления рабочим органом, которая обеспечивает принудительное опускание, подъем и разгрузку ковша, изменение глубины резания, подъем и опускание передней заслонки ковша с помощью гидроцилиндров двойного действия. Принудительное заглубление ножей ковша в грунт позволяет довольно точно регулировать толщину срезаемой стружки, сокращать время набора грунта и эффективно разрабатывать плотные грунты. Скреперы с канатным управлением практически вытеснены более эффективными машинами с гидравлическим приводом.
Конструкция У скреперов с загрузкой движущим усилием рабочим органом является ковш. Скрепер состоит из одноосного тягача 12 и собственно скрепера, соединенных седельно-сцепным устройством 11. Ковш скрепера 4 имеет боковые стенки из стальных листов, усиленных штампованными накладками. В передней части к выступающим боковым стенкам ковша приварены проушины для шарнирного крепления штоков двух гидроцилиндров подъема ковша 9. Днище ковша снизу усилено накладками. К его передней части приварены подножевые плиты, на которых укреплены ножи 1 прямой, ступенчатой или полукруглой формы, средний нож выдвинут вперед для облегчения резания грунта. Задняя стенка 7 состоит из щита и толкателя, предназначенного для присоединения штоков гидроцилиндров выдвижения задней стенки. Снизу стенка поддерживается двумя опорными роликами, перекатывающимися по днищу ковша. Принудительная выгрузка грунта, производимая выдвижением задней стенки гидроцилиндрами 3, допускает работу скрепера в грунтах с повышенной влажностью и вязкостью. Заслонка 8 при помощи рычагов шарнирно прикрепляется к боковым стенкам ковша. К средней части рычагов приварены кронштейны для присоединения штоков гидроцилиндров 5 заслонки. Буфер 6 предназначен для работы с трактором – толкачом. Тяговая рама скрепера 2 представляет собой П-образную раму, к средней части которой приварен хобот 10 коробчатого сечения. Хобот спереди оканчивается литой головкой с проушинами для соединения скрепера с тягачом. Конструкция сцепного устройства обеспечивает свободные взаимные повороты скрепера и тягача на кривых, уклонах и неровностях местности. Соединение с тягачом может осуществляться через тележку 13. У тяжелых самоходных скреперов установлен второй дополнительный двигатель для привода задних колес через гидромеханическую трансмиссию, что позволяет выполнить все колеса машины ведущими. Управление дополнительным двигателем и гидромеханической трансмиссией синхронизировано с управлением тягачом и ведется из кабины машиниста. Одновременную работу обоих двигателей используют при заполнении ковша и транспортировании грунта к месту разгрузки; при выгрузке ковша и обратном ходе используется один двигатель тягача. У таких машин полный вес конструкции и грунта используется в качестве активного сцепного веса, что повышает проходимость агрегата.
Рис. 2.2. Конструкция скреперов: а – самоходный скрепер; б…д – схемы соединения с тягачом; е – скрепер с принудительной загрузкой ковша скребковым элеватором
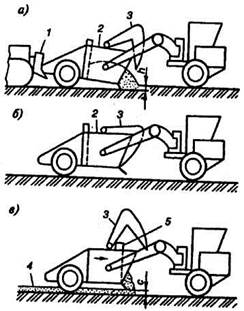
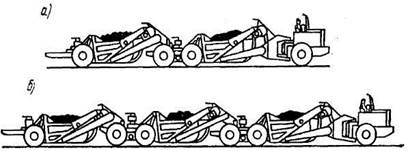
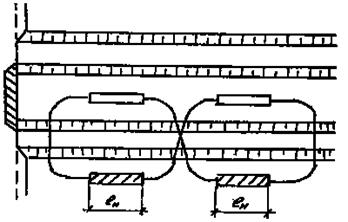
Рабочий цикл скрепера состоит из следующих последовательно выполняемых операций: резание грунта и наполнение ковша, транспортирование грунта в ковше к месту укладки, выгрузка и укладка грунта, обратный (холостой) ход машины в забой. При наборе грунта (рис. 2.3, а) ножи опущенного на грунт ковша 2 срезают слой грунта толщиной h, который поступает в ковш противодавлением находящегося перед ножами несрезанного слоя грунта при поднятой подвижной заслонке 3. Наполненный грунтом ковш на ходу поднимается в транспортное положение (рис. 2.3, б), а заслонкаопускается, препятствуя высыпанию грунта из ковша. При разгрузке ковша (рис. 2.3, в), заслонка поднята, а грунт вытесняется принудительно из приспущенного ковша выдвигаемой вперед задней стенкой 5, причем регулируемый зазор между режущей кромкой ковша и поверхностью земли определяет толщину с укладываемого грунта 4, который разравнивается (планируется) ножами ковша и частично уплотняется колесами скрепера. При холостом ходе порожний ковш поднят в транспортное положение, а заслонка опущена. Для увеличения тягового усилия скрепера при наполнении ковша в плотных грунтах обычно используют бульдозер-толкач 1 (см. рис. 2.3, а). При наполнении ковша скорость движения скреперов составляет 2…4 км/ч, при транспортном передвижении – 0, 5…0, 8 максимальной скорости трактора или тягача. Увеличению производительности скреперов способствует объединение их для работы в сцепы по 2…3 машины (рис. 2.4), управляемые одним водителем.
Рис. 2.3. Операции рабочего цикла самоходного скрепера
Рис. 2.4. Скреперные поезда: а – двухковшовый; б – трехковшовый
2.4. Автоматизация планировочных работ С целью облегчения труда машинистов, отечественная промышленность выпускает автоматизированные системы управления рабочим процессом скреперов «Стабилоплан-10» и «Копир-Стабилоплан-10». Аппаратура «Стабилоплан-10» предназначена для автоматического и дистанционного управления положением режущей кромки ковша скрепера по высоте. В состав аппаратуры «Стабилоплан-10» (рис. 2.5) входят: датчик углового положения ДКБ 1, пульт управления 2, блок управления 3, исполнительное устройство – гидрозолотник 4. Питание осуществляется от аккумулятора 5.
Рис. 2.5. Установка аппаратуры системы «Стабилоплан-10» Функциональная и электрическая схемы системы «Стабилоплан-10» идентичны функциональной и электрической схемам системы «Автоплан-10».
Рис. 2.6. Установка аппаратуры системы «Копир-Стабилоплан-10»: 1 – датчик частоты вращения ТГ; 2 – исполнительные механизмы (электрозолотники); 3 – блок перегрузки двигателя; 4 – пульт управления; 5 – механизм перемещения; 6 – фотоприемное устройство; 7 – датчик управления задней стенкой КВД; 8 – датчик углового положения ДКБ; 9 – лазерный излучатель; 10 – аккумулятор питания лазерного излучателя
Анализ эксплуатации прицепных скреперов на планировочных работах показал, что при планировке земляной поверхности под заданную отметку, скреперист должен управлять высотным положением ковша, перемещением задней стенки при подсыпке и загрузке, выглублением ковша при перегрузке двигателя тягача. С целью автоматизации процессов всех этих работ создана система автоматического управления скреперами «Копир-Стабилоплан-10» (рис. 2.6). Автоматическая стабилизация положения режущей кромки ковша скрепера обеспечивается либо автономной системой управления, чувствительным элементом которой является датчик углового положения ДКБ, либо копирной системой, в которой в качестве опорной (задающей) плоскости используется луч лазера, а в качестве чувствительного элемента – фотоприемное устройство (ФПУ). В этом случае датчик углового положения ДКБ устанавливается на буфере ковша скрепера и преобразует угловое перемещение корпуса датчика относительно вертикали в электрический сигнал. Одновременно с процессом стабилизации режущей кромки обеспечивается защита двигателя от перегрузки; чувствительным элементом системы защиты является датчик частоты вращения ТГ. Автоматическая подсыпка осуществляется принудительно выталкиванием грунта задней стенкой при передвижении скрепера под уклон и на выемках. Датчики управления задней стенкой КВД устанавливаются на ковше скрепера и представляют собой бесконтактные выключатели. Фотоприемное устройство ФПУ устанавливается на ковше скрепера и представляет собой прибор, контролирующий положение режущей кромки ковша скрепера относительно лазерной направляющей. Пульты управления и блок защиты двигателя от перегрузок устанавливаются в кабине трактора и служат для дистанционного управления и преобразования сигналов датчиков ДКБ, ФПУ, ТГ и КВД в команды управления электромагнитами золотников. Гидрозолотники с электрическим управлением устанавливаются на тракторе и служат для управления гидроцилиндром ковша скрепера при работе в автоматическом режиме. Установка глубины резания производится дистанционно из кабины трактора задатчиком, расположенным на пульте управления. Система «Копир-Стабилоплан-10» - автономно-копирная, состоит из двух частей: автономной (бортовой) аппаратуры автоматики и копирно-лазерного устройства. Автономная система включает в себя системы угловой стабилизации ковша скрепера и выглубления ковша при перегрузках двигателя трактора-тягача (эти системы аналогичны системам угловой стабилизации и выглубления отвала бульдозера) и систему управления выгрузкой грунта из ковша задней стенкой. Копирно-лазерное устройство и его работа подробно описаны в /1/.
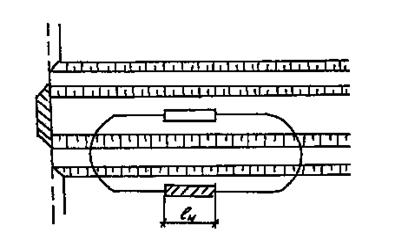
Схемы движения скреперов Производительность скреперных работ, их стоимость и качество во многом определяются выбранными схемами движения. При выборе в проекте производства работ схем движения скреперов учитываются следующие основные требования: - путь движения скреперов должен быть кратчайшим и с наименьшим числом крутых поворотов; - левые и правые повороты желательно чередовать, что способствует равномерному износу ходовых частей скрепера; - фронт работы в выемке и на насыпи должен быть достаточным для полной загрузки и последующей разгрузки скрепера; - должны быть максимально снижены подъемы в грузовом и порожнем направлениях. Многолетней практикой установлены следующие рациональные схемы движения скреперов: эллиптическая, спиральная, по «восьмёрке», по зигзагу, челночно-поперечная и челночно-продольная. Эллиптическая схема (рис. 2.7) является наиболее простой. Она применима во всех случаях возведения насыпей из односторонних или двухсторонних резервов, а так же при устройстве выемок с укладкой грунта в дамбы, насыпи или кавальеры и при планировочных работах в промышленном и гражданском строительстве. Особенно целесообразна данная схема, когда при поперечном перемещении грунта рабочие отметки незначительны, и устройства выездов или съездов не требуются, а так же при продольной возке грунта из выемки в смежную насыпь.
Рис. 2.7. Эллиптическая схема движения
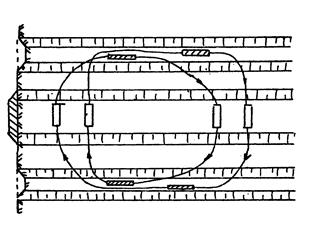
Спиральная схема (рис. 2.8) – разновидность эллиптической, применима при возведении широких насыпей из двухсторонних резервов или широких выемок глубиной до 2, 5 м, так как выполняется без устройства выездов и съездов. Спиральная схема по сравнению с эллиптической увеличивает производительность, так как при отсыпке грунта перпендикулярно к оси возводимого сооружения сокращается дальность его транспортирования.
Рис. 2.8. Спиральная схема движения
Схема движения по «восьмёрке» (рис. 2.9) применима при тех же условиях, что и эллиптическая. В данной схеме левые и правые повороты чередуются, что позволяет получить равномерный износ ходовых частей скрепера и вдвое сократить время на повороты. Производительность скреперов при движении по «восьмёрке» на 3…5% выше, чем при движении по эллипсу.
Рис. 2.9. Схема движения по «восьмерке»
Схему движения скрепера по зигзагу (рис. 2.10) применяют при возведении насыпей высотой до 6 м из резервов при длине захватки 200 м и более. При работе скрепера по этой схеме уменьшается число поворотов и дальность возки грунта, вследствие чего производительность скрепера возрастает до 15% по сравнению с эллиптической схемой движения.
Рис. 2.10. Схема движения по зигзагу
Челночно-поперечная схема (рис. 2.11) применяется при возведении насыпей и дамб высотой менее 1, 5 м при работе из двухсторонних резервов, или при устройстве выемок глубиной до 1, 5 м с укладкой грунта в кавальеры. Движение скреперов при челночно-поперечной схеме аналогично эллиптической схеме. Набор грунта производится перпендикулярно к оси выемки или резерва, ширина которых должна обеспечивать заполнение ковша скрепера. По сравнению с эллиптической схемой производительность скрепера при данной схеме движения возрастает на 20…25 %.
Рис. 2.11. Челночно-поперечная схема движения
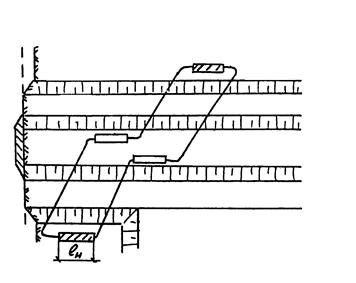
Челночно-продольная схема движения скреперов (рис. 2.12) применяется при возведении насыпей высотой до 5…6 м с заложением откосов не круче 1: 2, с транспортировкой грунта из двухсторонних резервов. При движении по этой схеме холостой пробег скрепера сокращается до минимума.
Рис. 2.12. Челночно-продольная схема движения
При вертикальной планировке площадей применяют эллиптическую, спиральную и челночно-поперечную схемы движения скреперов. Сведения, касающиеся выбора рациональных схем резания грунта при работе скрепера и производства тяговых расчетов, подробно изложены в методических указаниях /5/.
Назначение
Бульдозеры предназначены для послойной разработки и перемещения грунтов I…IV категорий, а также предварительно разрыхленных скальных, мерзлых и талых грунтов. Их используют для обратной засыпки траншей и котлованов, сооружения насыпей из грунтов боковых резервов (hн до 1…1, 5 м) или продольной возкой, грубого планирования земляных поверхностей, для подготовительных работ при расчистке полосы отвода. Применяются они также для распределения грунтовых отвалов при работе экскаваторов и землевозов, формировании террас на косогорах, в качестве толкачей скреперов и на ряде других работ. Максимально возможный объем призмы волочения современные бульдозеры набирают на участке длиной 6…10 м. Экономически целесообразная дальность перемещения грунта не превышает 60…100 м для гусеничных бульдозеров и 100…140 м для пневмоколесных машин. Тяговый класс базового трактора (тягача) – главный параметр бульдозеров. Преимущественное распространение получили гусеничные бульдозеры, обладающие высокими тяговыми усилиями и проходимостью. Чем выше тяговый класс машины, тем больший объем земляных работ она способна выполнять в отведенный интервал времени и тем более прочные грунты может разрабатывать. Широкое использование бульдозеров в строительном производстве определяется простотой их конструкции, надежностью и экономичностью в эксплуатации, высокими производительностью, мобильностью и универсальностью. В процессе рабочего цикла при движении машины вперед отвал с помощью системы управления заглубляется в грунт, срезает ножами слой грунта и перемещает впереди себя образовавшуюся грунтовую призму волоком по поверхности земли к месту отсыпки; после завершения данной операции отвал поднимается в транспортное положение и машина возвращается к месту набора грунта.
Классификация
Бульдозеры классифицируют: по назначению – общего назначения, используемые для выполнения основных видов землеройно-транспортных и вспомогательных работ в различных грунтовых и климатических условиях, и специальные, применяемые для выполнения целевых работ в специфических грунтовых или технологических условиях (бульдозеры-толкачи, подземные и подводные бульдозеры); в зависимости от тягового класса (номинального тягового усилия) базовых машин – малогабаритные (класс до 0, 9), легкие (классов 1, 4…4), средние (классов 6…15), тяжелые (классов 25…35) и сверхтяжелые (класса свыше 35); по типу ходового устройства – гусеничные и пневмоколесные; по конструкции рабочего органа – с неповоротным в плане отвалом, постоянно расположенным перпендикулярно продольной оси базовой машины, и с поворотным отвалом, который может устанавливаться перпендикулярно или под углом до 53° в обе стороны к продольной оси машины; по типу системы управления отвалом – с гидравлическим и механическим (канатно-блочным) управлением. При канатно-блочной системе управления подъем отвала осуществляется зубчато-фрикционной лебедкой через канатный полиспаст, опускание – под действием собственной силы тяжести отвала. При гидравлической системе управления подъем и опускание отвала осуществляется принудительно одним или двумя гидроцилиндрами двустороннего действия. Бульдозеры с механическим управлением в настоящее время активно вытесняются более эффективными бульдозерами, снабженными гидравлическим приводом. Конструкция
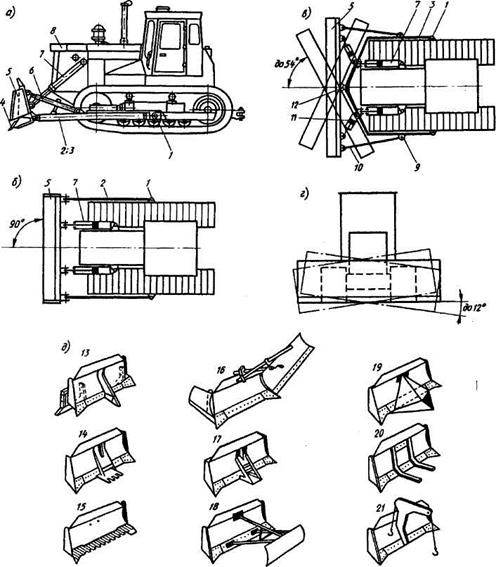
Бульдозеры выполняют как навесное оборудование на гусеничных (рис. 3.1, а) и пневмоколесных (рис. 3.2) тракторах. У гусеничных рабочее оборудование в виде отвала 5 с ножами 4 в его нижней части навешивают на трактор 8 через два толкающих бруса 2 (рис. 3.1, б) или универсальную раму 3 (рис. 3.1, в), которые имеют шарнирные соединения 1 с боковыми балками ходовых тележек трактора. У пневмоколесных тракторов соединение осуществляется с кронштейнами их нижней рамы. Вместе с толкающими брусьями и раскосами 6 (см. рис. 3.1, а) отвал образует жесткую систему, которая с помощью одного или двух гидравлических цилиндров 7 может подниматься и опускаться, поворачиваясь в вертикальной плоскости относительно шарниров 1. При этом режущая кромка ножей отвала всегда остается перпендикулярной оси машины. По второй схеме отвал соединяют с универсальной рамой шаровым шарниром 12 (рис. 3.1, в) и двумя толкателями 10, задние шарниры 9 которых закреплены в ползунах, перемещающихся по направляющим боковых балок подковообразной универсальной рамы и фиксируемых в требуемых положениях закладными штырями. Горизонтальный поворот отвала с отклонениями в каждую сторону на угол 30…36° выполняют двумя гидроцилиндрами 11. Отвалы, навешенные на базовый трактор по этой схеме, называются поворотными (в плане) в отличие от неповоротных отвалов, навешенных по схеме рис. 3.1, б. Их применяют для обратной засыпки траншей и котлованов, на планировочных работах, для очистки площадей от строительного мусора и т.п. Замена раскосов 6 постоянной длины винтовыми стяжками (талрепами) или гидроцилиндрами, способными изменять свою длину, обеспечивает регулирование угла резания и поперечный перекос отвала на угол до 12° в каждую сторону (рис. 3.1, г). Угол резания регулируют одинаковым изменением длин обоих раскосов, а для установки отвала с поперечным перекосом каждому раскосу задают разную длину. С теми же целями в схеме поворотных отвалов изменяют положение шарниров 9 (см. рис. 3.1, в) по высоте ползунов. За счет поперечных перекосов отвала удается сократить число повторных проходок при планировке поверхностей с поперечными уклонами на косогорах и повысить тем самым производительность машины.
а – вид сбоку; б – вид в плане на бульдозер с неповоротным отвалом; в – то же, с поворотным отвалом; г – поперечный перекос отвала; д – сменные рабочие органы Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 2845; Нарушение авторского права страницы