
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Материальное тело, размеры которого в рассматриваемых условиях можно не учитывать, называют материальной точкой.Стр 1 из 9Следующая ⇒
ВВЕДЕНИЕ В СТАТИКУ
Учебное пособие
Благовещенск
ББК 22.21 Печатается по решению Л 71 редакционно-издательского совета энергетического факультета Амурского государственного Университета
Луганцева Т.А., Ларченко Н.М.
Введение в статику. Учебное пособие. – Благовещенск: Амурский гос. ун-т, 2010.
В пособии рассмотрен материал, который относится к первой части раздела «Статика» (Первый модуль блочно-модульной системы обучения). Теоретические и практические вопросы, рассмотренные в учебном пособии, относятся к материалу, знания которого необходимо студентам для изучения условий и уравнений равновесия систем сил (второй модуль раздела «Статика») и приведения систем сил к простейшему виду (третий модуль раздела «Статика»). Пособие предназначено для студентов всех специальностей и форм обучения университета, изучающих курс теоретической механики.
Рецензенты: В.А. Чайкин, зав. кафедрой теоретической и прикладной механики Санкт-Петербургского государственного университета технологии и дизайна, докт. техн. наук, профессор; Т.В. Труфанова, доцент кафедры математического анализа и моделирования, канд. техн. наук.
© Амурский государственный университет, 2010 © Луганцева Т.А., Ларченко Н.М., 2010 СОДЕРЖАНИЕ
ВВЕДЕНИЕ ……………………………………………………….……………...3 1. Основные понятия статики…………………………………….…………......3 1.1. Теоретические сведения…..……………………………………………... 3 1.2. Рекомендуемая литература…………………………………………….. 14 1.3. Упражнения и консультации………………………………..…………. 14 1.4. Вопросы для самоконтроля……………………………………………. 16 1.5. Тесты по теме………………………………………………………….... 17 1.6. Задания для самостоятельной работы студентов……………………....21 2. Аксиомы статики…………………………………………………..………... 22 2.1. Теоретические сведения……………………………..……….………… 22 2.1.1. Аксиома 1…………………………………………………………. 22 2.1.2. Аксиома 2……………………………………..………..…………. 23 2.1.3. Аксиома 3…………………………………..………..……………. 23 2.1.4. Аксиома 4…………………………………………………………. 26 2.1.5. Аксиома 5…………………………………………………………. 28 2.1.6. Аксиома 6…………………………………………………………. 28 2.2. Рекомендуемая литература………………………………………………31 2.3. Вопросы для самоконтроля…………………………………………….. 31 2.4. Тесты по теме…………………………………………………………….32 2.5. Задания для самостоятельной работы студентов………………………38 3. Связи и их реакции………………………………………………………….. 39 3.1. Понятие связей………………………………………………………….. 39 3.2. Упражнения на определение связей…………………………………... 39 3.3. Виды связей и их реакции……………………………………………… 42 Односторонние связи……………………………………………………45 Двухсторонние связи (первая группа)………………………………… 51 Двухсторонние связи (вторая группа)………………………………… 54 86 3.4. Упражнения и консультации…………………………………………... 62 3.5. Рекомендуемая литература…………………………………………….. 67 3.6. Задания для самостоятельной работы………………………………… 67 3.7. Задания для самостоятельной работы студентов…………………….. 68 3.8 Ответы к заданиям……………………………………………………… 71 3.9. Вопросы для самоконтроля……………………………………………. 74 3.10. Тесты по теме………………………………..………………………... 75 ВВЕДЕНИЕ Теоретическая механика – наука об общих законах механического движения и взаимодействия материальных тел и их систем. Любые изменения, происходящие в окружающем нас реальном мире, называются движением. Теоретическая механика изучает простейшую форму движения материи – механическое движение. Механическим движением называется изменение с течением времени взаимного положения материальных точек в пространстве. Механическим взаимодействием называется такое взаимодействие материальных тел, которое изменяет или стремится изменить характер их механического движения. В настоящее время теоретическая механика – сложившаяся наука, достигшая аксиоматического уровня развития и ставшая научной базой современной техники. По характеру изучаемых задач теоретическая механика традиционно разделяется на три раздела: статику, кинематику и динамику.
Основные понятия статики. Теоретические сведения
Статика изучает условия равновесия твердого тела, находящегося под действием некоторой системы сил, условия эквивалентности двух систем сил, а также преобразование заданной системы сил к каноническому виду. Под равновесием понимается состояние покоя по отношению к определенной системе координат. Чтобы твердое тело под действием некоторой системы сил находилось в равновесии (покое), необходимо чтобы эти силы удовлетворяли определенным условиям равновесия данной системы сил. Нахождение этих условий является одной из основных задач статики. Но для отыскания условий равновесия различных систем сил, а также для решения ряда других задач механики, необходимо уметь складывать силы, действующие на твердое тело, заменять действие одной системы сил другой системой и, в частности, приводить данную систему сил к простейшему виду. Поэтому в статике твердого тела рассматриваются две основные задачи: 1) замена одной системы сил, действующей на твердое тело, другой эквивалентной ей системой. Основная цель такой замены – упростить заданную систему сил, т.е. свести большое число сил, действующих на тело, к возможно меньшему их числу. Такая операция называется приведением системы сил к простейшему виду; 2) определение необходимых и достаточных условий равновесия (вывод уравнений) механической системы, находящейся под действием сил по отношению к определенной системе координат (для использования в расчетах различных конструкций и сооружений). Ни одна наука не обходится без абстракций, идеализированных схем реальных явлений. Даже при современном уровне развития механики и вычислительной техники полное описание объекта исследования не представляется возможным, как, впрочем, и необходимым. В задачах механики, отбрасывают все свойства, которые не влияют или достаточно мало влияют на решение задачи, поэтому в теоретической механике, как и в любой другой науке, используется метод абстракции. В практике инженерных расчетов расчетной схемой является абстракция (динамическая модель) реального явления, в которой стремятся отобразить наиболее существенные факторы рассматриваемой задачи. Материальные (физические) тела – это тела, которые имеют сложную структуру и множество свойств - таких как температура, теплопроводность, электропроводность, влажность и т.п. Отбрасывая те или иные малозначительные факторы и вводя некоторые упрощающие предположения, можем получить различные модели одного и того же физического тела. Итак, динамическая модель (модель) – это идеализированное отображение рассматриваемой системы, используемое при ее теоретическом исследовании и инженерных расчетах с учетом особенностей поставленной задачи. Поскольку таких задач может быть много, то одному объекту в зависимости от целей расчета может отвечать целый ряд динамических явлений. Важнейшими моделями в теоретической механике являются: материальная точка, системы материальных точек, абсолютно твердое тело, идеальные связи. В природе такие материальные объекты отсутствуют, поэтому теоретическую механику следует рассматривать как приближенную в смысле описания реальных явлений. Однако в ряде случаев теоретические расчеты решения задач, например законы движения планет (законы Кеплера), движения спутников вокруг земли, движения свободных твердых тел в атмосфере, движения механизмов и деталей машин и т.д. достаточно точно согласуются с экспериментальными данными. Если линейные размеры реального материального тела малы, по сравнению с каким-нибудь линейным размером для движения этого тела, (путь, пройденный телом, радиус кривизны траектории его центра тяжести и т.д.), или, когда форма и размеры тела не играют существенной роли в данной конкретной задаче, то приближенно, можно пренебречь размерами такого тела, принимая его за геометрическую точку с массой, равной массе реального тела. Например, при изучении движения планет Солнечной системы вокруг Солнца их размерами по сравнению с их расстояниями от Солнца пренебрегают и рассматривают эти планеты как материальные точки. С другой стороны, изучая движение планеты (например, Земли) вокруг оси, ее уже нельзя считать материальной точкой. Тело можно считать материальной точкой во всех случаях, когда все его точки совершают тождественные движения. Материальное тело, размеры которого в рассматриваемых условиях можно не учитывать, называют материальной точкой. Совокупность сил, приложенных к данному телу, называется системой сил. Силы, входящие в систему сил, называют составляющими силами. Если под действием системы сил, твердое тело остается в покое или совершает так называемое инерциальное движение, (например, все точки тела движутся прямолинейно с постоянной и одинаковой для всех точек тела скоростью), то такое состояние тела называется состоянием равновесия. Упражнения и консультации Примечание: Консультацией пользуйтесь в том случае, когда затрудняетесь ответить на вопросы или хотите проверить правильность своего ответа. Задания Консультации
Вопросы для самоконтроля 1. Что изучает статика? 2. Что называется материальной точкой, системой материальных точек, абсолютно твердым телом? 3. Какие тела называются свободными и несвободными? Привести примеры. 4. Приведите определение понятия «сила». 5. Перечислите признаки, характеризующие силу. 6. Основные характеристики силы, единицы измерения силы в различных системах единиц. 7. Как изображается сила на плоскости (в пространстве)? Что называется системой сил? 8. Приведите примеры сосредоточенных и распределенных сил. 9. Что называется равнодействующей произвольной системы сил? 10. Всегда ли существует равнодействующая? 11. Какая сила называется уравновешивающей? 12. Какие силы по отношению к системе тел являются внешними, какие – внутренними? Дайте определение внешних и внутренних сил. Привести пример, когда одна и та жесила может выступать в роли либо внешней, либо внутреннейсилы. 13. Доказать, что в замкнутой системе сумма внутренних сил 14. Какие системы сил называются статически эквивалентными? 15. Какие системы сил частного вида вы знаете? 16. В чем сходство и различие между равнодействующей и уравновешивающей силами? Тесты по теме
1.6 Задания для самостоятельной работы студентов 1). Изучить подраздел 1.1 данного методического пособия. 2). Сделать дополнения в своем конспекте лекций, обращаясь также к рекомендуемой литературе. 3). Проработать упражнения подраздела 1.3. и тесты подраздела 1.5. 4). Ответить на вопросы для самопроверки и тесты. Аксиомы статики. 2.1 Теоретические сведения Статика основана на аксиомах, вытекающих из опыта и принимаемых без доказательств. Аксиомы статики устанавливают основные свойства сил, приложенных к абсолютно твердому телу. В различных учебниках различное количество аксиом статики. Нумерация также различна. 2.1.1 Аксиома 1, (инерции) Упражнения Консультации
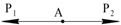
2.1.2 Аксиома 2 , устанавливающая условие равновесия двух сил Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю ç F1ç = ç F2ç и направленные по одной прямой в противоположные стороны (рис. 7).
Рис. 7 2.1.3 Аксиома 3 присоединения и исключения уравновешенных сил Упражнения Консультации
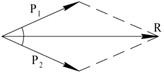
2.1.4 Аксиома 4 определяет правила сложения двух сил Равнодействующая двух сил, приложенных в одной точке, приложена в точке их пересечения и равна по величине и направлению диагонали параллелограмма, построенного на этих силах как на сторонах (рис. 11). Правило 1 определения равнодействующей (правило параллелограмма) Определение равнодействующей двух сил по правилу параллелограмма называется векторным или геометрическим сложением и выражается векторным равенством, (рис. 11): R = FS = F 1 + F 2.
Рис. 11 Упражнения Консультации
2.2 Рекомендуемая литература Основная: 1). Яблонский А.А., Никифорова В.Л. Курс теоретической механики. М., 2002. с. 8 – 10. 2). Тарг С.М. Краткий курс теоретической механики. М., 2002. с. 11 – 15. 3). Цывильский В.Л. Теоретическая механика. М., 2001. с. 16 – 19. 4) Аркуша А.И. Руководство к решению задач по теоретической механике. М., 2000. с. 4 – 20. Дополнительная: 5). Аркуша А.И. Техническая механика. М., 2002. с. 10 – 15. 6). Чернышов А.Д. Статика твердого тела. Красн-к., 1989. с. 13 – 20. 7). Эрдеди А.А. Теоретическая механика. Сопротивление материалов. М., 2001. с. 8 – 12. 8) Олофинская В.П. Техническая механика. М., 2003. с. 5 – 7. Вопросы для самоконтроля 1. Привести примеры, иллюстрирующие аксиомы статики. 2. Объяснить положение: аксиомы статики установлены опытным путем. 3. Привести примеры применения аксиом статики в технике. 4. Сформулируйте аксиому о равновесии двух сил. 5. Назовите простейшую систему сил эквивалентную нулю. 6. В чем сущность аксиомы присоединения и исключения уравновешенной системы сил? 7. В чем физический смысл аксиомы отвердевания? 8. Сформулируйте правило параллелограмма сил. 9. Что выражает аксиома инерции? 10. Являются ли условия равновесия абсолютно твердого тела необходимыми и достаточными для равновесия деформируемых тел? 11. Приведите формулировку аксиомы равенства действия и противодействия. 12. В чем принципиальная ошибка выражения «действие и противодействие уравновешиваются»? 13. Как направлена равнодействующая R системы сил, если сумма проекций этих сил на ось OY равна нулю? 14. Как определяется проекция силы на ось? 15. Изложить алгоритм (порядок)определения модуля равнодействующей Fz, если заданы: а) модуль и направление одной составляющей F, а также направления другой составляющей F2 и равнодействующей; б) модули обеих составляющих и направление равнодействующей; в) направления обеих составляющих и равнодействующей. Тесты по теме
2.5 Задания для самостоятельной работы студентов 1). Изучить подраздел 2.1 данного методического указания, проработав предложенные упражнения. 2) Ответить на вопросы для самоконтроля и тесты по данному разделу. 3). Сделать дополнения в своем конспекте лекций, обращаясь также к рекомендуемой литературе. 4). Изучить и сделать краткий конспект следующего раздела «Д ействие над векторами » (4, с. 4-20), (7, с. 13, 14): 1.Сложение векторов. Правила параллелограмма, треугольника и многоугольника. Разложение вектора на два составляющих. Разность векторов. 3. Сложение и разложение векторов графоаналитическим способом. 4. Решить самостоятельно следующие номера задач (4, с. 14-16, 19): 6-2, 8-2, 9-2, 10-2, 13-3, 14-3. Связи и их реакции Понятия связей Как уже отмечалось, в механике тела могут быть свободными и несвободными. Системы материальных тел (точек), положения и движения, которых подчинены некоторым геометрическим или кинематическим ограничениям, заданным наперед и не зависящим от начальных условий и заданных сил, называется несвободной. Эти ограничения, наложенные на систему и делающие ее несвободной, называются связями. Связи могут осуществляться с помощью различных физических средств: механических соединений, жидкостей, электромагнитных или других полей, упругих элементов. Примерами несвободных тел являются груз, лежащий на столе, дверь, подвешенная на петлях, и т.п. Связями в этих случаях будут: для груза – плоскость стола, не дающая грузу перемещаться по вертикали вниз; для двери – петли, не дающие двери отойти от косяка. Связями также являются тросы для грузов, подшипники для валов, направляющие для ползунов и т.д. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1039; Нарушение авторского права страницы
 2а) все ли элементы, характеризующие силу как вектор, указаны в условии?
2 б) сделайте чертеж и изобразите силу тяжести в масштабе.
2а) все ли элементы, характеризующие силу как вектор, указаны в условии?
2 б) сделайте чертеж и изобразите силу тяжести в масштабе.
 Выберем масштаб построения вектора. Длина отрезка l, изображающего вектор Р, прямо пропорциональна его модулю Р:
Р = µР∙ l,
где µР – масштаб построения вектора.
Для изображения вектора Р, модуль которого равен десяти единицам, выберем отрезок длиной ab=20мм, то получим значение масштаба: µР = Р/ab = 10/20 = 0, 5 Н/мм.
Выбрав масштаб, изобразим силу тяжести, которая направлена вертикально вниз, приложена в центре шара и имеет модуль 10Н.
Выберем масштаб построения вектора. Длина отрезка l, изображающего вектор Р, прямо пропорциональна его модулю Р:
Р = µР∙ l,
где µР – масштаб построения вектора.
Для изображения вектора Р, модуль которого равен десяти единицам, выберем отрезок длиной ab=20мм, то получим значение масштаба: µР = Р/ab = 10/20 = 0, 5 Н/мм.
Выбрав масштаб, изобразим силу тяжести, которая направлена вертикально вниз, приложена в центре шара и имеет модуль 10Н.


 а) ОА; б) АВ; в) ВС; г) СД; д) ОД.
а) ОА; б) АВ; в) ВС; г) СД; д) ОД.






 и
и  . При присоединении или отбрасывании таких систем сил полученная система сил остается эквивалентной исходной системе сил и кинематическое состояние тела не изменяется.
6.2 Система сил (1.) преобразована в систему сил (3.) на основании свойства силы: силу можно переносить вдоль ее линии действия в пределах данного тела в любую точку, при этом кинематическое состояние тела или эквивалентность системы сил не изменяется.
6.3Система сил (1.) преобразована в систему сил (4.) путем переноса сил
. При присоединении или отбрасывании таких систем сил полученная система сил остается эквивалентной исходной системе сил и кинематическое состояние тела не изменяется.
6.2 Система сил (1.) преобразована в систему сил (3.) на основании свойства силы: силу можно переносить вдоль ее линии действия в пределах данного тела в любую точку, при этом кинематическое состояние тела или эквивалентность системы сил не изменяется.
6.3Система сил (1.) преобразована в систему сил (4.) путем переноса сил  и
и  вдоль их линии действия в точку С, а следовательно системы сил (1.) и (4.) эквивалентны.
6.4Система сил (1.) преобразована в систему сил (5.) путем перехода от системы сил (1.) к системе сил (4.) и сложения сил
вдоль их линии действия в точку С, а следовательно системы сил (1.) и (4.) эквивалентны.
6.4Система сил (1.) преобразована в систему сил (5.) путем перехода от системы сил (1.) к системе сил (4.) и сложения сил  7, а)
7, а)  ;
;
 R = 3, 86 Н.
7, б) cos 90º = 0;
R = 3, 86 Н.
7, б) cos 90º = 0;


 ; R =2H.
; R =2H.
 8 б) cos 0º = 1; R = Р1+Р2 = 4 Н.
8 б) cos 0º = 1; R = Р1+Р2 = 4 Н.
 8 в) cos 180º = –1; R = Р2–Р1 = 2 – 2 = 0.
8 в) cos 180º = –1; R = Р2–Р1 = 2 – 2 = 0.
 Примечание: если Р1 ≠ Р2 и Р1> Р2, то R направлена в ту же сторону, что и сила Р1.
Примечание: если Р1 ≠ Р2 и Р1> Р2, то R направлена в ту же сторону, что и сила Р1.
 а) Можно.
б) Нельзя.
а) Можно.
б) Нельзя.
 а) б) в)
а) б) в)
 на ось y?
на ось y?
 а) F× sina; б) -F× sina;
в) F× cosa; г) – F× cosa.
а) F× sina; б) -F× sina;
в) F× cosa; г) – F× cosa.
 , если известно: Рх = 30Н,
Рy = 40Н.
а) cos
, если известно: Рх = 30Н,
Рy = 40Н.
а) cos  = 3/4; cos
= 3/4; cos  = 0.
б) cos
= 0.
б) cos  а)
а)  ;
б)
;
б)  ;
в)
;
в)  ;
г)
;
г)  .
.
 ;
;  .
а)
.
а)  Н.
б)
Н.
б)  Н.
в)
Н.
в)  Н.
г)
Н.
г)  Н.
д) Правильного решения нет.
Н.
д) Правильного решения нет.
 а) Fx = F× sina.
б) Fx = -F× sina.
в) Fx = -F× cosa.
г) Fx = F× cosa.
а) Fx = F× sina.
б) Fx = -F× sina.
в) Fx = -F× cosa.
г) Fx = F× cosa.
 а) Рy = P× sin60°;
б) Рy = P× sin30°;
в) Рy = - P× cos30°;
г) Рy = -P× sin30°;
д) Нет правильного ответа.
а) Рy = P× sin60°;
б) Рy = P× sin30°;
в) Рy = - P× cos30°;
г) Рy = -P× sin30°;
д) Нет правильного ответа.
 а) -F× sina;
б) F× sina;
в) -F× cosa;
г) F× cosa.
а) -F× sina;
б) F× sina;
в) -F× cosa;
г) F× cosa.
 ;
б)
;
б)  ;
в)
;
в)  ;
г)
;
г)  .
.
 а) Нарушится;
б) Не нарушится.
а) Нарушится;
б) Не нарушится.