
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПОСТУПАТЕЛЬНОГО И ВРАШАТЕЛЬНОГО ДВИЖЕНИЙ.
Масса m Момент инерции J Скорость v Угловая скорость w Ускорение a Угловое ускорение e Сила F Момент силы M Импульс p = mv Момент импульса L = Jw Основное уравнение Основное уравнение динамики F = dp/dt динамики M = dL/dt F = ma M = Je Работа dA = Fds Работа dA = Mdj Кинетическая Кинетическая энергия mv2/2 энергия Jw2/2
8.9. Свободные оси. Гироскоп Для того чтобы сохранить положение оси вращения твердого тела с течением времени неизменным, используют подшипники, в которых она удерживается. Однако существуют такие оси вращения тел, которые не изменяют своей ориентации в пространстве без действия на нее внешних сил. Эти оси называются свободными осями (или осями свободного вращения). Можно доказать, что в любом теле существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями (они называются главными осями инерции тела). Например, главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис.). Для однородного цилиндра одной из главных осей инерции является его геометрическая ось, а в качестве остальных осей могут быть две любые взаимно перпендикулярные оси, проведенные через центр масс в плоскости, перпендикулярной геометрической оси цилиндра. Главными осями инерции шара являются любые три взаимно перпендикулярные оси, проходящие через центр масс.Для устойчивости вращения большое значение имеет, какая именно из свободных осей служит осью вращения тела. Можно показать, что вращение вокруг главных осей с наибольшим и наименьшим моментами инерции оказывается устойчивым, а вращение около оси со средним моментом — неустойчивым. Так, если подбросить тело, имеющее форму параллелепипеда, приведя его одновременно вовращение, то оно, падая, будет устойчиво вращаться вокруг осей 1 и 2. Если, например, палочку подвесить за один конец нити, а другой конец, закрепленный к шпинделю центробежной машины, привести в быстрое вращение, то палочка будет вращаться в горизонтальной плоскости около вертикальной оси, перпендикулярной оси палочки и проходящей через ее середину. Это и есть ось свободного вращения (момент инерции при этом положении палочки максимальный). Если теперь палочку, вращающуюся вокруг свободной оси, освободить от внешних связей (аккуратно снять верхний конец нити с крючка шпинделя), то положение оси вращения в пространстве в течение некоторого времени сохраняется. Свойство свободных осей сохранять свое положение в пространстве широко применяется в технике. Наиболее интересны в этом плане гироскопы — массивные однородные тела, вращающиеся с большой угловой скоростью около своей оси симметрии, являющейся свободной осью.
Рис. 60. Рассмотрим одну из разновидностей гироскопов — гироскоп на кардановом подвесе (рис. ). Дискообразное тело — гироскоп — закреплено на оси АА, которая может вращаться вокруг перпендикулярной ей горизонтальной оси ВВ, которая, в свою очередь, может поворачиваться вокруг вертикальной оси DD. Все три оси пересекаются в одной точке С, являющейся центром масс гироскопа и остающейся неподвижной, а ось гироскопа может принять любое направление в пространстве. Силами трения в подшипниках всех трех осей и моментом импульса колец пренебрегаем. Таккак трение в подшипниках мало, то, пока гироскоп неподвижен, его оси можно придать любое направление. Если начать гироскоп быстро вращать (например, с помощью намотанной на ось веревочки) и поворачивать его подставку, то ось гироскопа сохраняет свое положение в пространстве неизменной. Это можно объяснить с помощью основного закона динамики вращательного движения. Для свободно вращающегося гироскопа сила тяжести не может изменить ориентацию его свободной оси, так как эта сила приложена к центру масс (центр вращения С совпадает с центром масс), а момент силы тяжести относительно закрепленного центра масс равен нулю. Моментом сил трения мы также пренебрегаем. Поэтому если момент внешних сил относительно его закрепленного центра масс равен нулю, то, L = const. т. е. момент импульса гироскопа сохраняет свою величину и направление в пространстве. Следовательно, вместе с ним сохраняет свое положение в пространстве и ось гироскопа. Чтобы ось гироскопа изменила свое направление в пространстве, необходимо, отличие от нуля момента внешних сил. Если момент внешних сил, приложенных к вращающемуся гироскопу, относительно его центра масс отличен от нуля, то наблюдается явление, получившее название гироскопического эффекта. Оно состоит в том, что под действием пары сил F, приложенной к оси вращающегося гироскопа, ось гироскопа (рис. ) поворачивается вокруг прямой О3О3, а не вокруг прямой O2O2 , как это казалось бы естественным на первый взгляд ( O1O1 и O2O2 лежат в плоскости чертежа, а О3О3 и силы F перпендикулярны ей).
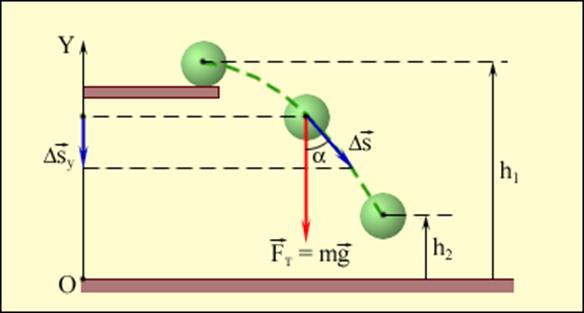
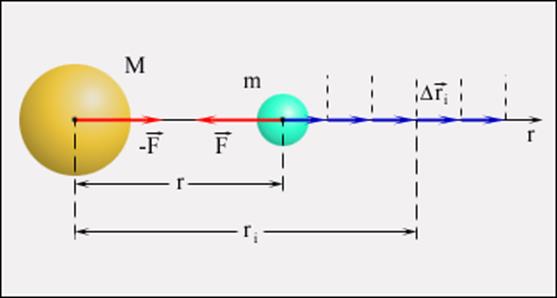
Рис.61. Гироскопический эффект объясняется следующим образом. Момент М пары сил F направлен вдоль прямой О2О2. За время dt момент импульса L гироскопа получит приращение dL=Mdt (направление dL совпадает с направлением М) и станет равным L'=L+dL. Направление вектора L' совпадает с новым направлением оси вращения гироскопа. Таким образом, ось вращения гироскопа повернется вокруг прямой О3О3. Если время действия силы мало, то, хотя момент сил М и велик, изменение момента импульса dL гироскопа будет также весьма малым. Если ось гироскопа закреплена подшипниками, то вследствие гироскопического эффекта возникают так называемые гироскопические силы, действующие на опоры, в которых вращается ось гироскопа. Их действие необходимо учитывать при конструировании устройств, содержащих быстровращающиеся массивные составные части. Гироскопы применяются для поддержание заданного направления движения транспортных средств, например судна (авторулевой) и самолета (автопилот) и т. д. При всяком отклонении от курса вследствие каких-то воздействий положение оси гироскопа в пространстве сохраняется. Следовательно, ось гироскопа вместе с рамами карданова подвеса поворачивается относительно движущегося устройства. Поворот рам карданова подвеса с помощью определенных приспособлений включает рули управления, которые возвращают движение к заданному курсу. РАБОТА В ПОЛЕ ТЯГОТЕНИЯ. При перемещении тела в поле тяготения совершается работа dA = - FdR = - (GmMз/Rз2)dRз, (8.30). знак минус потому, что сила и перемещение противоположны по направлению, т.е. работу совершают внешние по отношению к полю тяготения силы.
A = ò dA = - 1ò 2(GmMз/R2)dR = m[GMз(1/R2 - 1/R1)]. (8.31). A = - DW = - (Wп2 - Wп1) = (Wп1 - Wп2) = - m[GMз(1/R1 - 1/R2)]. (8.32). ПОТЕНЦИАЛ ПОЛЯ ТЯГОТЕНИЯ. W0 = - GmMз/R = - mj, (8.33). где j - является энергетической характеристикой поля тяготения, называемой потенциалом. Потенциал поля тяготения определяется потенциальной энергией тела единичной массы в данной точке поля. Между потенциалом поля тяготения j и его напряженностью g имеется определенная зависимость. dA = - mdj, (8.34). с другой стороны dA = Fdl = mgdl, (8.35). т.е. mgdl = - mdj, (8.36). или g = - dj/dl. (8.37).
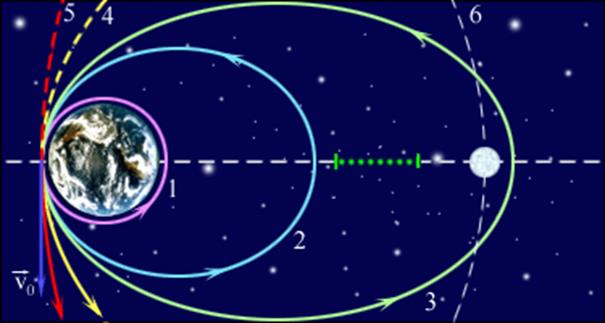
КОСМИЧЕСКИЕ СКОРОСТИ. Первой космической скоростью называют скорость, которую необходимо сообщить телу, чтобы оно двигалось вокруг Земли по круговой орбите. По второму закону Ньютона GmMз/r=mv2/r, (8.38). и с учетом g =GMз/Rз и Rз> > (Rз+ h), (8.39). получим v1=gRз=7, 9 км/c. Вторая космическая скорость необходима для превращения тела в спутник Солнца v2=2gRз=11, 2км/с. Третья космическая скорость, нужна чтобы тело покинуло Солнечную систему v3 = 16, 7 км/с.
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ.
Рис. 65. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ. Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напряжение и ток в цепи. Физическая природа колебаний может быть разной, поэтому различают колебания механические, электромагнитные и другие. Однако различные колебательные процессы описываются одинаковыми характеристиками и одинаковыми уравнениями. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Колебани я называются свободными (или собственными ), если они совершаются за счет первоначально совершенной энергии при последующем отсутствии внешних воздействий на колебательную систему (систему, совершающую колебания). Простейшим типом колебаний являются гармонические колебания - колебания, при которых колеблющаяся величина изменяется со временем по закону синуса. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif
х = Amcos(w0t + j), (8.40). Am - максимальное значение х (амплитуда колебания), w0 - круговая (циклическая) частота, j - начальная фаза колебаний в момент времени t =0, (w0t + j) - фаза колебаний в момент времени t. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif
Положения точки повторяются через промежуток времени Т (период), за который фаза колебаний получает приращение 2p. w0(t + T) = w0t + 2p, (8.41). откуда T = 2p/w0. (8.42). z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif
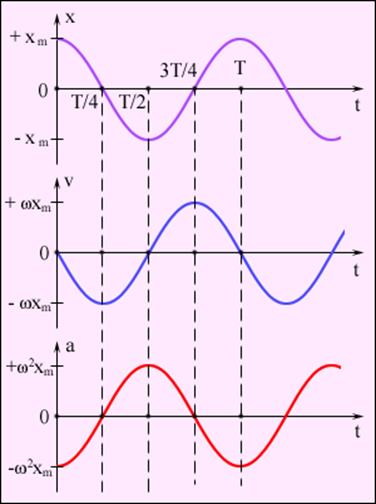
w0 =2pn. (8.43). Поскольку скорость является первой производной по времени от координаты, а ускорение второй производной, v = - Aw0sin(w0t + j) = Aw0cos(w0t + j + p/2). (8.44). a = Aw02cos(w0t + j) = Aw0 2cos(w0t + j + p). (8.45). Сила F =- am, действующая на точку массой m, равна F = -mw02x. (8.46). Сила пропорциональна смещению материальной точки из положения равновесия и направлена в противоположную сторону. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif
Wкин. = mv2/2 = [mA02w02sin2(w0t +j)]/2. (8.47). Wкин. = [mA02w02 {1 - cos2(w0t +j)}]/4. (8.48). Потенциальная энергия точки, совершающей гармонические колебания под действием упругой силы F, равна Wпот. = - 0ò хFdx = (mw02x02)/2 = [mA02w02cos2(w0t +j)]/2. (8.49). Wпот. = [mA02w02{1 + cos22(w0t +j)}]/4. (8.50). Сумма кинетической и потенциальной энергии дает полную энергию, которая остается постоянной. Wпол. = Wкин. + Wпот. = Wпот. = (mw02А02)/2, ( 8.51). При гармонических колебаниях справедлив закон сохранения механической энергии. Обе энергии изменяются с частотой 2w0.
ПРУЖИННЫЙ МАЯТНИК.
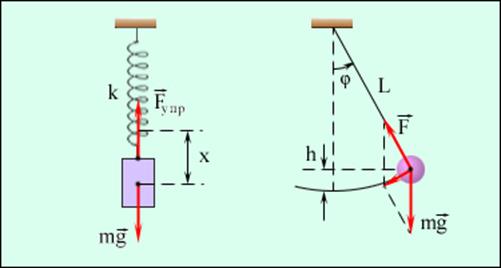
Масса m, подвешенная на упругой пружине и совершающая гармонические колебания под действием упругой силы F = - kx, (8.52). где k - коэффициент упругости. Уравнение движения маятника mx// = - kx (8.53). или x// + (k/x)m = 0. (8.54). Маятник совершает гармонические колебания с частотой w02 = k/m и периодом T = 2pÖ (m/k). (8.55). Формула справедлива для упругих колебаний в пределах, когда масса пружины мала по сравнению с массой тела. Потенциальная энергия такого маятника, равна Wпот. = (kx2)/2. (8.56). ФИЗИЧЕСКИЙ МАЯТНИК.
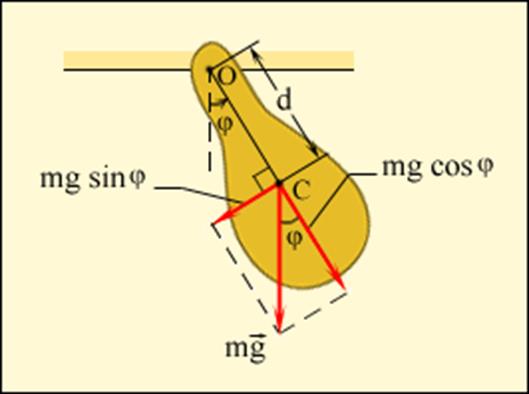
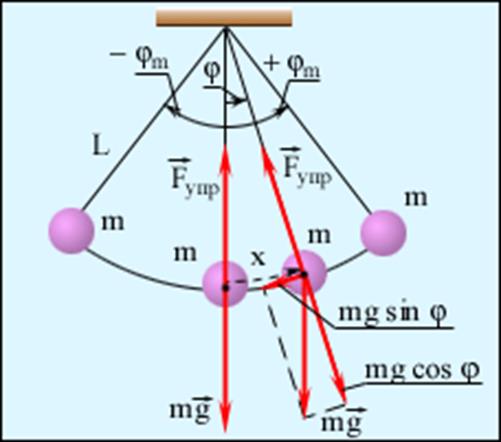
Это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной оси подвеса, не проходящей через центр масс тела. При его отклонении из положения равновесия на малый угол a, по уравнению динамики вращательного движения твердого тела, момент М силы M = Je = Ja// = F.l = - mglsina = - mgla. (8.57). где J - момент инерции маятника относительно оси, проходящей через точку О, l - расстояние между точкой подвеса и центром масс маятника, F = - mgsina = - mga (8.58). - возвращающая сила. Ja// + mgla = 0. (8.59). или a// + (mgla)/J = 0. (8.60). С учетом w = Ö mgl/J, получим уравнение a + wa = 0, (8.61). решая которое, получим a = acos(wt + j). (8.62). При малых колебаниях физический маятник совершает колебания с циклической частотой w и периодом T = 2p/w = 2pÖ J/(mgl). (8.63). МАТЕМАТИЧЕСКИЙ МАЯТНИК. Это точка массой m, подвешенная на невесомой нити, и колеблющейся под действием силы тяжести. Момент инерции J = ml2, (8.64). где l - длина маятника. Поскольку математический маятник это частный случай физического маятника, когда вся масса сосредоточена в одной точке, то период его колебаний T = 2pÖ l/g. (8.65).
РЕЗОНАНС. Резкое возрастание амплитуды вынужденных колебаний при сближении частот вынуждающей силы и собственной называется резонансом. При d2 < < w02 значение wрез. практически совпадает с собственной частотой w0 колебательной системы. И получим Aрез. = x0/2dÖ w02 - d2. (8.66). Для скорости wAрез=x0w/Ö (w02-w2)+4d2w2=x0/Ö (w02-w2)/w2+4d2. (8.67). максимальна при w = w0 и равна x0/(2d), т.е. чем больше коэффициент затухания d, тем ниже максимум резонансной кривой и амплитуда скорости при резонансе равна Aрез. = x0/(2d) = F/r. (8.68). Изображенная на рисунке совокупность графиков функции называется резонансными кривыми. A/x = ω 0/2β = 2π /2β T = π /λ = Q. (8.69). где
Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 739; Нарушение авторского права страницы

 - логарифмический декремент затухания. Явления резонанса могут быть как вредными, так и полезными. Например, при конструировании машин и различного рода сооружений необходимо, чтобы собственная частота колебаний их не совпадала с частотой возможных внешних воздействий, в противном случае возникнут вибрации, которые могут вызвать серьезные разрушения. С другой стороны, наличие резонанса позволяет обнаружить даже очень слабые колебания, если их частота совпадает с частотой собственных колебаний прибора.
- логарифмический декремент затухания. Явления резонанса могут быть как вредными, так и полезными. Например, при конструировании машин и различного рода сооружений необходимо, чтобы собственная частота колебаний их не совпадала с частотой возможных внешних воздействий, в противном случае возникнут вибрации, которые могут вызвать серьезные разрушения. С другой стороны, наличие резонанса позволяет обнаружить даже очень слабые колебания, если их частота совпадает с частотой собственных колебаний прибора.