
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Перемещение будет определяться разностью конечного и начального радиус-векторов
Dr = r2 - r1, (2.15) т.е. перемещение это z: \Program Files\Physicon\Open Physics 2.5 part 1\content\chapter1\section\paragraph2\theory.htmlz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\ring_h.gif отрезок прямой, соединяющий начальное положение тела с его последующим.
Перемещение есть векторная величина. Пройденный путь s равен длине дуги траектории, пройденной телом за некоторое время t. Путь – скалярная величина.При движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути.
При этом путь Ds= SDr (2.16) будет равен сумме всех перемещений. Траектория движения материальной точки — линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. Для твердого тела добавляются еще три степени свободы вращательного движения, т.е. оно имеет шесть степеней свободы. При движении координаты с течением времени изменяются. Уравнения, характеризующие эти изменения, называются кинематическим уравнениями движения.
z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifЛекция № 3. 3.1. СКОРОСТЬ. Скоростью движения тела является вектор, характеризующий величину изменения координат тела с течением времени и направление этого изменения. Средней скоростью перемещения называется отношение вектора перемещения к тому промежутку времени, за который это перемещение произошло: ‹v› = ∆ r/∆ t. (3.1) При координатномспособе описания вводятся средние значения проекций скорости ‹vx› = ∆ x/∆ t. ‹vy› = ∆ y/∆ t. ‹vz› = ∆ z/∆ t., (3.2) Мгновенная скорость - это скорость в данный момент времени. Устремив Dt ® 0, получаем:.v = lim(∆ r/∆ t) = dr/dt, при ∆ t → 0. (3.3). т.е. вектор скорости точки в данный момент времени равен производной от радиуса-вектора r по времени t. Аналогично определяются проекции вектора скорости: vх = lim(∆ х/∆ t) = dх/dt, при ∆ t → 0. (3.4). vу = lim(∆ у/∆ t) = dу/dt, при ∆ t → 0. (3.5).
Рис. 12. Изменение вектора скорости по величине и направлению ∆ v = ∆ vτ + ∆ v n – изменение вектора скорости за время ∆ t. Модуль вектора мгновенной скорости легко находится по теореме Пифагора. При двумерном движении.v = √ vх2 +.v2у. (3.6). Графически мгновенная скорость всегда направлена по касательной к траектории движения. Длина пути, пройденного точкой за промежуток времени от t1 до t2, дается интегралом s = ò v(t)dt. (3.7) z: \Program Files\Physicon\Open Physics 2.5 part 1\content\chapter1\section\paragraph2\theory.htmlz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\ring_h.gif При движении тела по криволинейной траектории его скорость v изменяется по модулю и направлению. Вектор изменения скорости Δ v = v2 – v1 (3.8) за малое время Δ t можно разложить на две составляющие: Δ vτ направленную вдоль вектора v (касательная), и Δ vn направленную перпендикулярно вектору v (нормальная).
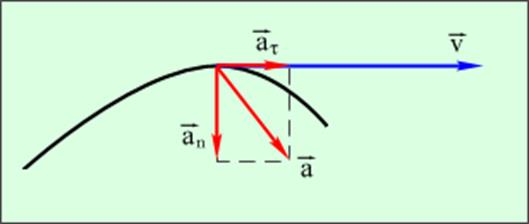
УСКОРЕНИЕ Ускорение — это вектор, характеризующий изменение величины и направления скорости с течением времени. Среднее < a> и мгновенное a ускорения определяются как: < a> = Dv/Dt, a = lim(∆ v/∆ t) = dv/dt = d2s/dt2, при ∆ t → 0. (3.9). А модуль ускорения a = dv/dt = d2s/dt2. (3.10). Модуль вектора мгновенного ускорения легко находится по теореме Пифагора. При двумерном движении a = √ aх2 +.a2у. (3.11). При криволинейном движении вектор полного ускорения целесообразно разложить по двум составляющим — тангенциальному ускорению at, направленному по касательной к траектории в сторону изменения скорости, и перпендикулярному нормальному (центростремительному) ускорению an, направленному по радиусу к центру траектории.
Полное ускорение будет геометрической суммой тангенциальной и нормальной составляющих a = aτ + an. (3.12). Тангенциальное ускорение отвечает за изменение модуля скорости, а нормальное ускорение — за изменение направления скорости. Величина тангенциального ускорения равна производной от модуля вектора скорости по времени: aτ = dv/dt. (3.13). Составляющая ускорения, характеризующая быстроту изменения скорости по направлению, называется нормальным ускорением. Она связана с приращением вектора скорости, направленным перпендикулярно касательной к траектории и равна an = v2/R, (3.14). где R - радиус кривизны траектории. Нормальное ускорение всегда направлено к центру кривизны траектории. Вектор полного ускорения Его модуль легко найти по теореме Пифагора: a = √ aτ 2 +.a2n (3.16). Дело в том, что и аτ , и аn – каждый имеет свою " специализацию": аτ отвечает за изменение скорости по величине, а аn отвечает за изменение скорости по направлению. Если скорость тела меняется только по величине и, следовательно, сохраняет свое направление, то, в соответствии с определением скорости, мы имеем дело с прямолинейным движением, и его ускорение будет только тангенциальным: aτ = dv/dt. (3.17). Если же скорость меняется лишь по направлению, а ее величина остается постоянной, то при таком криволинейном движении ускорение все равно будет, но оно полностью нормальное an = v2/R, (3.18). и в любой момент направлено к центру кривизны траектории:
УРАВНЕНИЯ ДВИЖЕНИЯ. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Простейшим видом механического движения является движение тела вдоль прямой линии с постоянной по модулю и направлению скоростью (равномерное прямолинейное движение ). При равномерном движении тело за равные промежутки времени проходит равные пути. Зависимость координаты x от времени t выражается при равномерном прямолинейном движении линейным математическим уравнением: X (t) = x0 + vt, (3.19) где v = const – скорость движения тела, x0 – координата точки, в которой тело находилось в момент времени t = 0.
На графике закон движения x(t) прямая линия. Чем больше угол α, который образует прямая с осью времени, т.е. чем больше наклон графика, тем больше скорость тела. Скорость тела равна тангенсу угла α наклона прямой x(t), так как стороны BC и AC треугольника ABC имеют разные размерности: сторона BC измеряется в метрах, а сторона AC – в секундах. a = at = an = 0; (3.20). v = const. (3.21). s = vt. (3.22). Путь, пройденный телом, можно тоже определить из графика. Т.к. при равномерном прямолинейном движении, s = vxt, (3.23). то путь численно равен площади под графиком vx(t): Равноускоренным прямо линейным движением z: \Program Files\Physicon\Open Physics 2.5 part 1\content\chapter1\section\paragraph2\theory.htmlz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\ring_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif называют движение, при котором вектор ускорения a остается неизменным по модулю и направлению. В случае прямолинейного движения векторы скорости v и ускорения a направлены вдоль прямой движения. Поэтому скорость v и ускорение a можно рассматривать в проекциях на направление движения как алгебраические величины. an = 0; (3.24). a = at = const. (3.25). График такой зависимости – отрезок прямой. Его наклон к оси времени говорит о величине ускорения: aх = tg α. (3.26). Как и в случае с равномерным движением, площадь под графиком vх(t) численно равна пути, пройденным телом.
Перемещение Δ s за время Δ t будет равно Δ s = vΔ t. (3.27). Перемещение за время t при равноускоренном прямолинейном движении равно площади трапеции ODEF. Перемещение s тела при равномерно ускоренном движении на промежутке времени от 0 до t:.s = v0t + (at2)/2. (3.28). Для нахождения координаты y тела в любой момент времени t к начальной координате y0 прибавляют перемещение за время t: y = y0 + v0t + (at2)/2. (3.29). График зависимости координаты тела от времени – парабола. При анализе равноускоренного движения иногда возникает задача определения перемещения тела по заданным значениям начальной v0 и конечной v скоростей и ускорения a. s = (v2 – v02)/2a. (3.30). Из этой формулы можно получить выражение для определения конечной скорости v тела, если известны начальная скорость v0, ускорение a и перемещение s: v = √ v02 + 2as. (3.31). Если начальная скорость v0 равна нулю то. s = v2/2a., (3.32). v = √ 2as. (3.33). an = 0; (3.34). a = at = const. (3.35). v = v0 + at; (3.36). s = s0 + v0t + at2/2,. (3.37). СВОБОДНОЕ ПАДЕНИЕ ТЕЛ. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Ускорение, с которым падают на Землю тела, называется ускорением свободного падения, обозначается символом g и направлен по вертикали вниз. В зависимости от географической широты числовое значение g оказывается неодинаковым, изменяясь от 9, 83 м/с2 на полюсах до 9, 78 м/с2 на экваторе. Свободное падение является прямолинейным движением с постоянным ускорением. y = h – gt2/2. (3.38). Время падения tп тела на Землю найдется из условия y = 0: (3.39). .tn = √ 2h/g. (3.40. Скорость тела в любой точке составляет: v =√ 2g(h – y). (3.41). При y = 0 скорость vn падения тела на землю равна.v = √ 2gh. (3.42). Отсюда можно вычислить время падения тела с высоты, скорость падения тела в любой момент после начала падения и в любой точке его траектории и т.д.. y = v0 –gt. (3.43).
Через время v0/g скорость тела v обращается в нуль, т.е. тело достигает высшей точки подъема. y = v0t – gt2/2. (3.44). Тело возвращается на землю (y = 0) через время 2v0/g, т.е., время подъема и время падения одинаковы. Во время падения на землю скорость тела равна – v 0, т.е. тело падает на землю с такой же по модулю скоростью, с какой оно было брошено вверх.. h = yмах. = v02/2g. (3.45). Если тело, брошено под некоторым углом к горизонту, то для кинематического описания движения тела удобно одну из осей системы координат направить вертикально вверх (ось OY), а другую (ось OX) - расположить горизонтально.
Тогда движение тела можно представить как сумму двух движений, протекающих независимо друг от друга – движения с ускорением свободного падения вдоль оси OY и равномерного прямолинейного движения вдоль оси OX. Таким образом, для движения вдоль оси OX имеем следующие условия: x0 =0, v0x=v0cosά, ax = 0. (3.46). а для движения вдоль OY: y0=0, (3.47) v0y=v0sinά, (3.48) av = -g. (3.49). Время полета: t=(2v0sinά )/g. (3.50). Дальность полета: L=(v02sin2ά )/g, (3.51). L =Lмач.=v02/g. при ά =450 (3.52). Максимальная высота подъема: h = (v02sin2ά )/2g. (3.53). Движение тела, брошенного под углом к горизонту, происходит по параболической траектории. ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. Движение тела по окружности является частным случаем криволинейного движения. Наряду с вектором перемещения Δ s удобно рассматривать угловое перемещение ∆ φ (или угол поворота ), измеряемое в радианах. Длина дуги связана с углом поворота соотношением Δ l = RΔ φ. (3.54) При равномерном движении тела по окружности величины v и ω остаются неизменными, а изменяется только направление вектора v. Равномерное движение тела по окружности является движением с ускорением. Ускорение. a = Δ v/Δ t, (Δ t → 0). (3.55) направлено по радиусу к центру окружности. Его называют нормальным или центростремительным ускорением. Модуль центростремительного ускорения связан с линейной v, и угловой ω скоростями: an = v2/R = ω 2R. (3.56) . R/(vΔ t) ≈ v/Δ v. (3.57). или Δ v/Δ t ≈ v2/R. (3.58). a = an = const. (3.59). at = 0; (3.60). v = const; (3.61). v = 2pR/T; (3.62). an= v2/R = (2pR)2/RT2 = (4p2R)/T2. (3.63)
Если тело движется по окружности неравномерно, то появляется также тангенциальная составляющая ускорения. aτ = Δ vτ /Δ t, (Δ t → 0). (3.64). В этой формуле Δ vτ = v2 – v1 – изменение модуля скорости за промежуток времени Δ t. Направление вектора полного ускорения a = aτ – an (3.65). определяется в каждой точке круговой траектории величинами нормального и касательного ускорений. at = dv/dt = R.dw/dt = Re; (3.66). an = v2/R = w2R; (3.67). a2 = at2 + an2 = (dv/dt)2 + (v2/R)2 = R(e2 + w2). (3.68). Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 788; Нарушение авторского права страницы



 (3.15).
(3.15). 



