|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Внутренним трением называется трение между слоями жидкости, двигающимися с различными скоростями.
Трение играет большую роль в природе и технике, являясь в одних случаях полезным, а в других вредным. Для уменьшения сил трения на трущиеся поверхности наносят смазку (сила трения уменьшается).
ЗАКОН ВСЕМИРНОГО ТЯГОТЕНИЯ. Два тела притягиваются друг к другу с силой пропорциональной произведению масс этих тел и обратно пропорциональной квадрату расстояния между ними, F = g.(m1m2)/r2, (4.8). где g - гравитационная постоянная, равная 6, 67.10-11 м2/кг.с2.
Силы, с которыми тела различной массы притягиваются друг к другу, называются гравитационными силами. Сила тяжести, с которой тело массой m притягивается к центру Земли, определяется силой гравитации между этим телом и Землей, можно записать, что mg =g(mM)/Rз2, (4.9). где M - масса Земли, Rз - радиус Земли. Отсюда получаем ускорение свободного падения g: g = gM/Rз2. (4.10).z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Движение планет в Солнечной системе, движение искусственных спутников Земли, траектории полета баллистических ракет, движение тел вблизи поверхности Земли – все эти явления находят объяснение на основе закона всемирного тяготения и законов динамики. Центробежная сила инерции равна Fцб.= mώ 2r, (4.11) где r = (R + h)cosά (4.12) - расстояние от тела до оси вращения. Центробежная сила максимальна на экваторе и обращается в нуль на полюсах. Под действием указанных двух сил тело движется с ускорением, называемым ускорением свободного падения g.
СИЛА ТЯЖЕСТИ И ВЕС. Равнодействующую силы тяготения и центробежной силы инерции называют силой тяжести. По второму закону Ньютона имеем: mg = Fтяж. = FT + Fцб.. (4.13). Сила тяжести равна произведению массы тела на ускорение свободного падения и всегда направлена к центру Земли.
Сила тяжести действует всегда, а вес проявляется, если на тело кроме силы тяжести действуют другие силы. Вес тела P определяется реакцией опоры. P = m(g - a), (4.14). где g - ускорение свободного падения, a - ускорение опоры. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Ускорение свободного падения для Земли равно 9, 81 м/с2 и радиус Земли (RЗ = 6, 38 106 м), и тогда масса Земли M = (gRЗ2)/G = 5, 98 1024 кг.
z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifПри этом предполагается, что тело неподвижно относительно опоры или подвеса. На тело действуют сила тяжести FT = mg направленная вертикально вниз, и сила упругости FY = N, с которой опора действует на тело. Силу N называют силой нормального давления или силой реакции опоры. Силы, действующие на тело, уравновешивают друг друга: FT =- FY = - N. (4.15). По третьему закону Ньютона тело действует на опору с некоторой силой P равной по модулю силе реакции опоры и направленной в противоположную сторону: P = - N. (4.16). Из приведенных выше соотношений видно, что P = FT = mg. (4.17). Но эти силы приложены к разным телам! Сила тяжести действует всегда, а вес проявляется, если на тело кроме силы тяжести действуют другие силы. Поверхность Земли не сферична, а имеет форму геоида, т.е. сплюснута с полюсов, что также влияет на зависимость ускорения свободного падения от географической широты. На ускорение свободного падения влияет неоднородность в распределении масс в Земле, что позволяет проводить поиск и разведку месторождений полезных ископаемых (методы гравиразведки).
z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifЛекция № 5. ОСНОВНЫЕ ПОНЯТИЯ О СИСТЕМЕ ТЕЛ. Твердое тело можно рассматривать как систему большого числа материальных точек. Состояние системы характеризуется одновременным заданием координат и скоростей всех ее частей. При движении системы ее состояние с течением времени изменяется. Тем не менее, существуют такие величины, которые обладают весьма важным и замечательным свойством сохраняться во времени. В механике такими величинами являются энергия, импульс и момент импульса. Система тел, на которую НЕ действуют никакие посторонние тела, называется замкнутой или изолированной. Силы взаимодействия между частицами (телами) системы называют внутренними, а силы, обусловленные действием других тел, не входящими в данную систему, - внешними. В неинерциальных системах отсчета к внешним относят и силы инерции. Потенциальными или консервативными называют силы, зависящие при данном характере взаимодействия только от конфигурации механической системы. ДЕФОРМАЦИИ ТВЕРДОГО ТЕЛА. Деформация, это изменение размеров и формы тела под действием каких-то сил. Деформация называется упругой, если после прекращения действия внешних сил тело принимает первоначальные размеры и форму. Деформации, которые сохраняются в теле после прекращения действия внешних сил, называются пластическими или остаточными.
z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Деформация это результат изменения межатомных расстояний и перегруппировки блоков атомов. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif При деформации тела возникает сила, которая стремится восстановить прежние размеры и форму тела. Эта сила возникает вследствие электромагнитного взаимодействия между атомами и молекулами вещества. Ее называют силой упругости.Простейшим видом деформации является деформация растяжения или сжатия. Все виды деформации (растяжение, сдвиг, изгиб, кручение) сводятся к одновременно происходящим деформациям растяжения (сжатия) и сдвига.
Рис. 29. Деформация растяжения (x > 0) и сжатия (x < 0). Внешняя сила F = - F упр. Возьмем однородный стержень длиной l и площадью поперечного сечения S, к концам которого приложены направленные вдоль его оси силы F1 и F2 (F1=F2 ), в результате чего длина стержня меняется на величину D l. Сила, действующая на единицу площади поперечного сечения, называется напряжением: s = F/S. (5.1). Продольная деформация e = Dl/l, (5.2). а относительное поперечное растяжение (сжатие) e1 = Dd/d, (5.3) где l - длина стержня, Dl - изменение длины, d -толщина стержня, Dd -изменение толщины. Деформации e и e1 всегда имеют разные знаки (при растяжении Dl -- положительно, а Dd - отрицательно, при сжатии - наоборот). Из опытов вытекает взаимосвязь e1 = -me, (5.4) где m - положительный коэффициент, зависящий от свойств материала, называемый коэффициентом Пуассона. Силы, возникающие в теле при его упругой деформации и направленные против направления смещения частиц тела, вызываемого деформацией, называют силами упругости. ЗАКОН ГУКА. (УПРУГИЕ СИЛЫ).
Для малых деформаций сила упругости определяется по закону Гука. Fупр.= - kDx, (5.5) где k - коэффициент деформации, Dх - величина деформации, знак “ минус ” означает, что сила упругости всегда действует в направлении, противоположном действию внешней силы.
z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Коэффициент k определяет жесткостью тела. В системе СИ жесткость измеряется в ньютонах на метр (Н/м). Коэффициент жесткости зависит от формы и размеров тела, а также от материала. Отношение έ = x/l (5.6). называется относительной деформацией, а отношение σ = F/S = - FУпр./S , (5.7). где S – площадь поперечного сечения деформированного тела, называется напряжением. И по закону Гука относительная деформация έ пропорциональна напряжению σ: έ = (1/E) σ. (5.8). Коэффициент E в этой формуле называется модулем Юнга. Модуль Юнга зависит от свойств материала и не зависит от размеров и формы тела. Закон Гука может быть обобщен и на случай более сложных деформаций. .При деформации изгиба упругая сила пропорциональна прогибу стержня, концы которого лежат на двух опорах. Деформации твердых тел подчиняются закону Гука до известных пределов. Линейная зависимость s от e, выполняется лишь в очень узких пределах. Линейная зависимость s(e), установленная Гуком, выполняется лишь в очень узких пределах до так называемого предела пропорциональности (sп). При дальнейшем увеличении напряжения деформация еще упругая (хотя зависимость s(e) уже нелинейна ) и до предела упругости (sу) остаточные деформации не возникают.
Напряжение, при котором появляется заметная остаточная деформация (»0, 2%), называется пределом текучести (sт) — точка С на кривой. В области CD деформация возрастает без увеличения напряжения, т. е. тело как бы «течет». Эта область называется областью текучести (или областью пластических деформаций). Материалы, для которых область текучести значительна, называются вязкими, для которых же она практически отсутствует — хрупкими. При дальнейшем растяжении (за точку D ) происходит разрушение тела. Максимальное напряжение, возникающее в теле до разрушения, называется пределом прочности (sр).
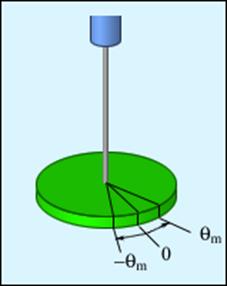
ДЕФОРМАЦИИ СДВИГА. Под действием касательной (тангенциальной) силы Ft, приложенной к верхней грани, брусок получает деформацию, называемую сдвигом. Величина, равная тангенсу угла сдвига tgγ = ∆ l/d, называется относительным сдвигом. При упругих деформациях угол g бывает очень мал, поэтому относительный сдвиг определяется формулой: tgγ = γ. (5.9). Деформация сдвига приводит к возникновению в каждой точке бруска тангенциального напряжения σ τ , которое определяется как модуль силы, действующей на единицу площади поверхности: σ τ = Fτ /S = |Fупр.τ |/S. (5.10) Закон Гука для сдвиговых деформаций имеет вид: γ = (1/G)σ τ , (5.11) где G зависит только от свойств материала и называется модулем сдвига. Для большинства однородных изотропных тел G = 0, 4 E. Модуль Юнга и модуль сдвига измеряются в Паскалях. ДЕФОРМАЦИИ КРУЧЕНИЯ.
Рассмотрим стержень в виде прямого кругового цилиндра радиуса r, верхнее основание которого закреплено, а в некотором произвольном сечении, расположенном на расстоянии L от закрепленного, приложена пара касательных сил Ft, момент которых по величине равен M = [FxL] (5.12) и направлен вдоль оси цилиндра. Под действием вращающего момента все сечения цилиндра поворачиваются на угол j тем больший, чем дальше эти сечения расположены от закрепленного основания. При упругих деформациях угол кручения пропорционален вращающему моменту: φ = (1/D)M. (5.13) Деформации кручения являются частным случаем сдвиговых деформаций, поскольку любое нижнее сечение испытывает сдвиг относительно верхнего. Поэтому модуль кручения можно выразить через модуль сдвига. Детальный расчет приводит к следующему выражению: D = G(π γ 4)/(2L). (5.14). Закон Гука может быть обобщен и на случай более сложных деформаций. В технике часто применяются спиралеобразные пружины. ИМПУЛЬС. Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой. Силы взаимодействия между материальными точками механической системы называются — внутренними. Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними. Механическая система тел, на которую не действуют внешние силы, называется замкнутой (или изолированной ). Если мы имеем механическую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю. Физическая величина, равная произведению массы тела на скорость его движения, называется импульсом тела. Импульс тела – векторная величина. Единицей измерения импульса в СИ является (кг·м/с). Физическая величина, равная произведению силы на время ее действия, называется импульсом силы. Второй закон Ньютона может быть сформулирован следующим образом: изменение импульса тела (количества движения) равно импульсу силы. FΔ t = Δ P. (5.15)
Рис. 35. Закон сохранения импульса. Векторное равенство в проекциях на координатные оси: FxΔ t = Δ Px. FyΔ t = Δ Py. FzΔ t = Δ Pz. (5.16). Рассмотрим в качестве примера одномерное движение, т.е. движение тела по одной из координатных осей (например, оси OY). Пусть тело свободно падает с начальной скоростью v0 под действием силы тяжести; время падения равно t. Направим ось OY вертикально вниз. Импульс силы тяжести Ft = mg за время t равен mgt. Этот импульс равен изменению импульса тела .Ftt = mgt = Δ P = m(v – v0), (5.17). откуда v = v0 + gt. (5.18). z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif При взаимодействии тел импульс одного тела может частично или полностью передаваться другому телу. В замкнутой системе векторная сумма импульсов всех тел, входящих в систему, остается постоянной при любых взаимодействиях тел этой системы между собой. Закон сохранения импульсаявляется следствием из второго и третьего законов Ньютона. Силы взаимодействия между двумя телами обозначим через F1 и F2. По третьему закону Ньютона F2 = - F1. Если эти тела взаимодействуют в течение времени t, то импульсы сил взаимодействия одинаковы по модулю и направлены в противоположные стороны: F2t = - F1t. Применим к этим телам второй закон Ньютона: F1t = m1v11 – m1v1., F2t = m2v21 – m2v2. (5.19). Где m1v1. и m2v2. - импульсы тел в начальный момент времени, m1v11 и m2v21 – импульсы тел в конце взаимодействия. Из этих соотношений следует: m1v1 + m2v2 = m1v11 + m2v21. (5.20). Это равенство означает, что в результате взаимодействия двух тел их суммарный импульс не изменился p = Spi = const. dp/dt=0; (5.21). Этот закон говорит о том, что обмен импульсами внутри системы не приводит к изменению суммарного импульса всей системы, если не действуют внешние силы. Закон сохранения импульса справедлив не только в классической физике, он выполняется и для замкнутых систем микрочастиц (они подчиняются законам квантовой механики). Этот закон носит универсальный характер, т. е. закон сохранения импульса — фундаментальный закон природы. Закон сохранения импульса является следствием определенного свойства симметрии пространства — его однородности. Однородность пространства заключается в том, что при параллельном переносе в пространстве замкнутой системы тел как целого ее физические свойства и законы движения не изменяются, иными словами, не зависят от выбора положения начала координат инерциальной системы отсчета. Отметим, что, импульс сохраняется и для незамкнутой системы, если геометрическая сумма всех внешних сил равна нулю. В механике Галилея—Ньютона из-за независимости массы от скорости импульс системы может быть выражен через скорость ее центра масс. Центром масс (или центром инерции ) системы материальных точек называется точка С, положение которой характеризует распределение массы этой системы. Ее радиус-вектор равен rc = ∑ (miri)/m. где mi и ri — соответственно масса и радиус-вектор i-й материальной точки; n — число материальных точек в системе; m = ∑ (mi) – масса системы. Скорость центра масс vc = drc/dt = (∑ mivi)/m. Учитывая, что pi = mivi , a (∑ pi. есть импульс р системы, можно написать p = mvc т. е. импульс системы равен произведению массы системы на скорость ее центра масс.
АБСОЛЮТНО УПРУГИЙ УДАР.
Закон сохранения механической энергии и закон сохранения импульса позволяют решать задачи в тех случаях, когда неизвестны действующие силы. Удар — это столкновение двух тел, при котором взаимодействие длится очень короткое время. Тела во время удара претерпевают деформацию и кинетическая энергия относительного движения соударяющихся тел на короткое время преобразуется в энергию упругой деформации. Во время удара происходит перераспределение энергии между соударяющимися телами. В механике используются две модели ударного взаимодействия – абсолютно упругий и абсолютно неупругий удары. Абсолютно упругий удар — столкновение двух тел, в результате которого в обоих взаимодействующих телах не остается никаких деформаций и вся кинетическая энергия, которой обладали тела до удара, после удара снова превращаются в кинетическую энергию. Для абсолютно упругого удара выполняются законы сохранения импульса и кинетической энергии. Центральным ударом шаров называют соударение, при котором скорости шаров до и после удара направлены по линии центров. Рассмотрим это на примере удара двух шаров массами m1 и m2, двигающихся со скоростями v1 и v2 до удара и со скоростями v11 и v21 после удара. m1v1 + m2v2 = m1v11 + m2v21, (5.22) и [m1v12]/2 + [m2v22]/2 = [m1(v11)2]/2 + [m2(v21)2]/2. (5.23). Проведя соответствующие преобразования, получим m1(v1 - v11) = m2(v21 - v2) и m1[v12 - (v11)2] = m2[(v21)2 - v22] (5.24) откуда v1 + v11 = v2 + v21. (5.25). Решая эти уравнения, находим v11 = [(m1 - m2)v1 + 2m2v2]/(m1 + m2); (5.26). v21 = [(m2 - m1)v2 + 2m1v1]/(m1 + m2); (5.27). ПРИМЕРЫ: При v2 = 0; v11 = [(m1 - m2)/(m1 + m2)].v1; v21 = [2m1/(m1 + m2)].v2 а) m1 = m2. Если второй шар был до удара неподвижен, v2 = 0, то после удара остановится первый шар (v11 = 0), а второй будет двигаться с той же скоростью и в том же направлении, в котором двигался первый шар до удара (v21 = v1); б) m1 > m2. Первый шар продолжает двигаться в том же направлении, как и до удара, но с меньшей скоростью (v11 < v1). Скорость второго шара после удара больше, чем скорость первого после удара (v21 > v11) в) m1 < m2. Направление движения первого шара при ударе изменяется — шар отскакивает обратно. Второй шар движется в ту же сторону, в которую двигался первый шар до удара, но с меньшей скоростью (v1 < v1). г) m2 > > m1. ( Cтолкновение шара со стеной.) v11 = - v1. v21 » 0.
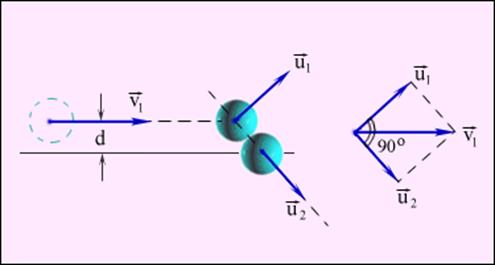
При нецентральном упругом соударении скорости частиц (шаров) до и после столкновения не направлены по одной прямой. При таком ударе центры шаров не только сближаются из-за деформации, но и скользят по поверхности друг друга. Возникшие при этом силы трения приводят к изменению скорости шаров и возникновению вращательного движения. Если силы трения отсутствуют, то тангенциальные силы во время столкновения не возникают и, следовательно, тангенциальные скорости шаров изменяться не будут. Нормальные составляющие скорости после удара можно определить на основании закона сохранения количества движения и закона сохранения энергии так же, как и при центральном ударе. После нецентрального соударения шары разлетаются под углом друг к другу.
Для определения скоростей u1 и u2 после удара нужно знать положение линии центров в момент удара или прицельное расстояние d, т.е. расстояние между двумя линиями, проведенными через центры шаров параллельно вектору скорости v1 налетающего шара. Если массы шаров одинаковы, то векторы скоростей u1 и u2 шаров после упругого соударения направлены перпендикулярно друг к другу. Это легко показать, применяя законы сохранения импульса и энергии. При m1 = m2 = m эти законы принимают вид: . v1 = u1 + u2, v22 = u12 + u22. (5.28). Векторы скоростей. v1, u1, u2, образуют треугольник (диаграмма импульсов), а для этого треугольника справедлива теорема Пифагора, т.е. он прямоугольный. Угол между катетами u1 и u2 равен 90°. АБСОЛЮТНО НЕУПРУГИЙ УДАР. Это столкновение двух тел, в результате которого тела объединяются, двигаясь дальше как единое целое.
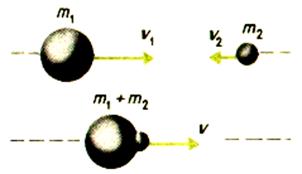
Рис. 40. Центральный неупругий удар. Если массы шаров m1 и m2, и скорости v1 и v2, то используя закон сохранения импульса получим m1v1 + m2v2 = (m1 + m2)v (5.29) откуда v = (m1v1 + m2v2)/(m1 + m2). (5.30) Если массы шаров равны (m1 = m2), то v = (v1 + v2)/2. (5.31) При абсолютно неупругом ударе часть энергии идет на необратимую деформацию тел. Следовательно, закон сохранения механической энергии в этом случае применять нельзя. Эту часть находят как разность кинетических энергий до и после удара: DW = [(m1v12)/2 + (m2v22)/2] - [(m1 + m2)v2/2] = = [(m1m2)/2(m1 + m2)].(v1 - v2)v2. (5.32) Если ударяемое тело было первоначально неподвижно (v2 = 0), v = (m1v1)/(m1 + m2); DW = [(m2)/(m1 + m2)].[m1v12/2]; (5.33) Когда m2> > m1, то v < < v1 и почти вся кинетическая энергия тела при ударе переходит в другие виды энергии. 5.9. ДВИЖЕНИЕ ТЕЛА С ПЕРЕМЕННОЙ МАССОЙ. Движение некоторых тел сопровождается изменением их массы, например масса ракеты уменьшается вследствие истечения газов, образующихся при сгорании топлива, и т. п. Выведем уравнение движения тела переменной массы на примере движения ракеты. Если в момент времени t масса ракеты m, а ее скорость v, то по истечении времени dt ее масса уменьшится на dm и станет равной т — dm, а скорость станет равной v + dv. По второму закону Ньютона изменение импульса равно dp = Fdt, (5.34) и изменение импульса системы dp = mdv + udm, (5.35) где v - скорость тела, а u - cкорость с которой масса dm покидает основную массу m. Тогда F = dp/dt = m.dv/dt +u.dm/dt. (5.36) Второе слагаемое в правой части называют реактивной силой Fp. Если u противоположен v по направлению, то ракета ускоряется, а если совпадает с v, то тормозится. Если масса со временем уменьшается (реактивное движение), то изменение массы dm за время dt отрицательно. m.dv/dt= F - u.dm/dt. (5.37). Таким образом, мы получили уравнение движения тела переменной массы, которое впервые было выведено И. В. Мещерским (1859—1935). Если u противоположна v, то тело ускоряется, а если u и v одинаковы по направлению, то тело тормозится. Применим это уравнение к движению ракеты, на которую не действуют никакие внешние силы. Если для ракеты скорость выбрасываемых газов постоянна, m.dv/dt = - u.dm/dt, (5.38) откуда v = - uò dm/m = - u.ln(m) +C. (5.39). Если в начальный момент времени скорость ракеты равна нулю, а ее стартовая масса m0, то С = u.ln(m0). (5.40). И получим формулу Циолковского для реактивного движения, v = u.ln(m0/m). (5.41). Идея применения реактивной силы для создания летательных аппаратов высказывалась в 1881 г. Н. И. Кибальчичем (1854—1881). К. Э. Циолковский (1857—1935) в 1903 г. опубликовал статью, где предложил теорию движения ракеты и основы теории жидкостного реактивного двигателя. Поэтому его считают основателем отечественной космонавтики. Она показывает, что: 1) чем больше конечная масса ракеты т, тем больше должна быть стартовая масса ракеты m0; 2) чем больше скорость истечения и газов, тем больше может быть конечная масса при данной стартовой массе ракеты.
z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifЛекция № 6. 6.1. ЭЛЕМЕНТЫ ГИДРОСТАТИКИ. ЗАКОН ПАСКАЛЯ.z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\buttonModel_h.gif z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Жидкость отличается от твердых тел способностью изменять свою форму. Поэтому жидкость принимает форму сосуда, в который она налита. В жидкость, как и в газообразную среду, можно погружать твердые тела. В отличие от газов жидкости практически несжимаемы. Давление это отношение силы F действующей перпендикулярно поверхности, к площади S этой поверхности: P = F/S. В СИ давление измеряется в паскалях (Па): 1Па=1Н/м2. Нормальная атмосфера (атм) и миллиметр ртутного столба (мм Hg): 1 атм.=101 325 Па =760 мм.Нg.
Жидкость является сплошной средой (системой частиц, равномерно и непрерывно распределенных в пространстве). Закон Паскаля: Давление в жидкости или газе передается во всех направлениях одинаково и не зависит от ориентации площадки, на которую оно действует.
Давление жидкости на дно или боковые стенки сосуда зависит от высоты столба жидкости. Сила давления на дно цилиндрического сосуда высоты h и площади основания S равна весу столба жидкости mg, где m = ρ ghS (6.1). – масса жидкости в сосуде, ρ – плотность жидкости. Следовательно p = ρ ghS/S = ρ gh. (6.2). Такое же давление на глубине h в соответствии с законом Паскаля жидкость оказывает и на боковые стенки сосуда. Давление столба жидкости p = ρ gh (6.3). называют гидростатическим давлением. Если жидкость находится в цилиндре под поршнем, то действуя на поршень некоторой внешней силой F можно создавать в жидкости дополнительное давление p0 = F/S, (6.4). где S – площадь поршня. Таким образом, полное давление в жидкости на глубине h можно записать в виде: p = p0 + ρ gh. (6.5). ЗАКОН АРХИМЕДА. Из-за разности давлений в жидкости на разных уровнях возникает выталкивающая или архимедова сила FA . В жидкость погружено тело в виде прямоугольного параллелепипеда высотой h и площадью основания S.
Разность давлений на нижнюю и верхнюю грани есть: Δ p = p2 – p1 = ρ gh. (6.6). Поэтому выталкивающая сила FA будет направлена вверх, и ее модуль равен FA = F2 – F1 = SΔ p = ρ gSh = ρ gV. (6.7). где V – объем вытесненной телом жидкости, а ρ gV – ее масса. Архимедова сила, действующая на погруженное в жидкость (или газ) тело, равна весу жидкости (или газа), вытесненной телом.
ГИДРАВЛИЧЕСКИЕ МАШИНЫ.
В сообщающихся сосудах любой формы, заполненных однородной жидкостью, давления в любой точке на одном и том же уровне одинаковы.
Если вертикально расположенные сообщающиеся сосуды закрыты поршнями, то с помощью внешних сил, приложенных к поршням, в жидкости можно создать большое давление p, во много раз превышающее гидростатическое давление ρ gh в любой точке системы. Тогда во всей системе устанавливается одинаковое давление p. Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 731; Нарушение авторского права страницы
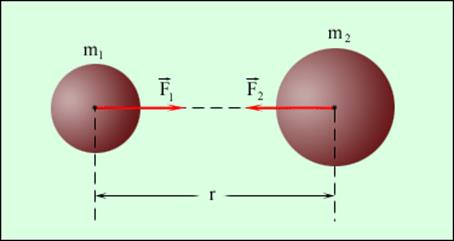
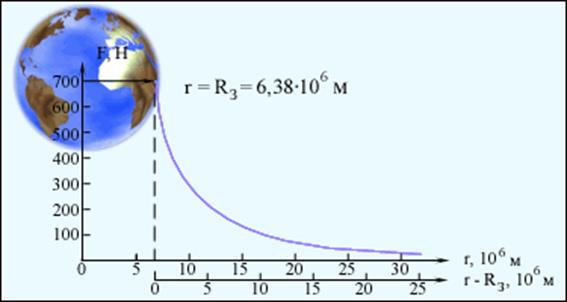


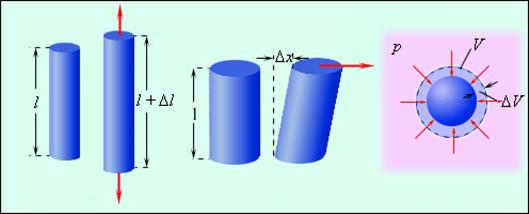
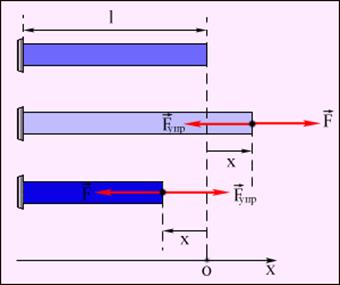






 Рис. 33.
Рис. 33.