|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
УРАВНЕНИЕ БЕРНУЛЛИ И ЕГО СЛЕДСТВИЯ.
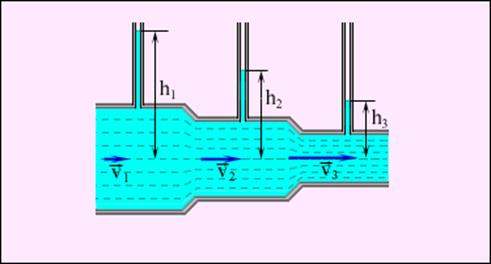
Выделим в текущей жидкости трубку тока, с сечениями S1 и S2. В месте сечения S1 скорость течения v1, давление р1 и высота, на которой это сечение расположено h1. А в месте сечения S2, скорость течения v2, давление р2 и высота сечения h2. За промежуток времени Dt жидкость перемещается от сечения S1 и S11 к сечениям S2 и S21. По закону сохранения энергии, изменение полной энергии W2 - W1 жидкости равно работе А внешних сил по перемещению массы m жидкости: W2 - W1 = A, (6.15). где W2 и W1 - полные энергии жидкости массой m в местах сечений S1 и S2. Но А - это работа, перемещения жидкости, заключенной между сечениями S1 и S2, за время Dt. При перенесении массы m от S1 до S11 жидкость перемещается на расстояние l1 = v1Dt. (6, 16). и от S2 до S21 - на расстояние l2 = v2Dt. (6.17). Следовательно, A = F1l1 + F2l2, (6.18). где F1 = p1S1 (6.19). и F2 = p2S2. (6.20). Полные энергии: W1 и W2, будут складываться из потенциальной и кинетической энергий: W1 =(mv12)/2 +mgh1; (6.21). W2 =(mv22)/2 +mgh2. (6.22). Подставим выражение для энергий в выражение для работы: (mv12)/2 + mgh1 + p1S1v1Dt = (mv22)/2 + mgh2 + p2S2v2Dt. (6.23). По уравнению неразрывности, объем жидкости, постоянен: DV = S1v1Dt = S2v2Dt. (6.24). Разделив уравнение для работы на DV, получим (rv12)/2 + rgh1 + p1 = (rv22)/2 + rgh2 +p2, (6.25). где r - плотность жидкости. Для любого сечения (rv2)/2+rgh + p = cоnst. (6.26). Уравнение Бернулли — это закон сохранения энергии для установившегося течения жидкости. Величина р, называется статическим давлением, величина (rv2)/2 - динамическим давлением, а rgh - гидростатическим давлением. Для горизонтальной трубки тока (h1 = h2) можно записать (rv2)/2 + p = const, (6.27). где p + (rv2)/2 (6.28). называется полным давлением. Из уравнений неразрывности и Бернулли следует, что при течении жидкости по горизонтальной трубе с разными сечениями, скорость больше в местах сужения, а статическое давление больше в более широких местах. В частности, для горизонтально расположенной трубы (h1 = h2) уравнение Бернулли принимает вид: (ρ v2)/2 + p =const. (6.29). Из него следует, что: Давление в жидкости, текущей по горизонтальной трубе переменного сечения, больше в тех сечениях потока, в которых скорость ее движения меньше, и наоборот, давление меньше в тех сечениях, в которых скорость больше. Если сечение потока жидкости достаточно велико, то уравнение Бернулли следует применять к линиям тока, т.е. линиям, вдоль которых перемещаются частицы жидкости при стационарном течении. При истечении жидкости из отверстия в боковой стенке или дне широкого сосуда линии тока начинаются вблизи свободной поверхности жидкости и проходят через отверстие. Рассмотрим два сечения (на уровне h1 поверхности жидкости в сосуде и на уровне h2 выхода ее из отверстия). (rv12)/2 + rgh1 + p1= (rv22)/2 + rgh2 + p2. (6.30).
Д авления р1 и р2 вне жидкости на уровнях первого и второго сечений равны атмосферному ( р1 = р2), то уравнение примет вид: (v12)/2 + gh1 = (v22)/2 + gh2. (6.31). Из уравнения неразрывности следует, что v2/v1 = S1/S2, (6.32). где S1 и S2 - площади поперечных сечений. Если S1 > > S2, то членом v12/2 можно пренебречь и тогда v22 = 2g(h1 - h2) = 2gh, (6.33). v2 = Ö 2gh. (Формула Торичелли). (6.34).
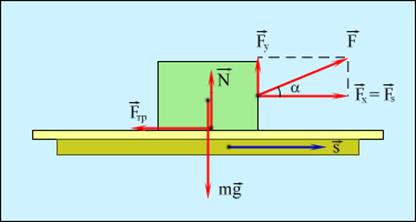
z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifЛекция № 7. ЭНЕРГИЯ. РАБОТА. В качестве единой количественной меры различных форм движения материи и соответствующих им взаимодействий в физики вводится скалярная величина ( энергия). Движение - неотъемлемое свойство материи. Поэтому любое тело, любая система тел и полей обладают энергией. Для различных форм движения и соответствующих им взаимодействий в физике вводят различные виды энергии – механическую, внутреннюю, электромагнитную, ядерную и т.д. Энергия - мера способности тела совершить работу. Движущиеся тела обладают кинетической энергией. Поскольку существуют два основных вида движения - поступательное и вращательное, то кинетическая энергия представлена двумя формулами - для каждого вида движения. Потенциальная энергия - энергия взаимодействия. Полная механическая энергия является суммой кинетической и потенциальной. Для оценки процесса обмена энергией между телами, в механике вводится понятие работы. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifРаботой A, совершаемой постоянной силой F называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла α между векторами силы F и перемещения s. A = (F.s) = F.s(cosa). (7.1). Работа является скалярной величиной. Она может быть как положительна (0 ≤ ά < 90o), так и отрицательна (900 < ά ≤ 180o). В системе СИ работа измеряется в джоулях (Дж). Джоуль равен работе, совершаемой силой в 1 H на перемещении 1 м в направлении действия силы.
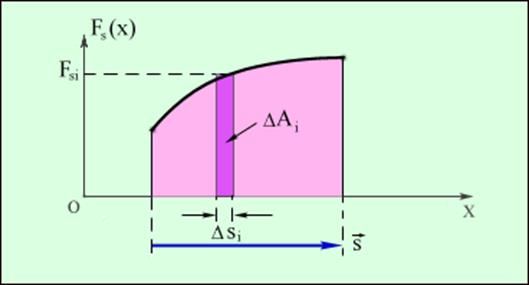
z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Если проекция Fx силы F на направление перемещения s не остается постоянной, работу следует вычислять для малых перемещений Δ si и суммировать результаты: A = ∑ Δ Ai = ∑ FsiΔ si. (7.2). Элементарной работой силы называется скалярная величина: dA = (F.dr) = F(cosa).ds. (7.3). A = ò F(cosa)ds. (7.4).
Необходимо только знать функцию силы F вдоль траектории. Работа всех внешних сил, действующих на материальную точку, равна приращению кинетической энергии этой точки: A = W2 - W1 = (mv22)/2 - (mv12)/2. (7.5).
z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Графически работа определяется по площади криволинейной фигуры под графиком Fs(x). Если к телу приложено несколько сил, то общая работа всех сил равна алгебраической сумме работ, совершаемых отдельными силами и равна работе равнодействующей приложенных сил. Работа силы, совершаемая в единицу времени или скорость совершения работы, называется мощностью. N = dA/dt = F.dr/dt = F.v. (7.6). Мощность N это физическая величина, равная отношению работы A к промежутку времени t, в течение которого совершена эта работа: N = A/t. В Международной системе СИ единица мощности называется ватт (Вт). Ватт равен мощности силы, совершающей работу в 1 Дж за время 1 с. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ. Кинетическая энергия - это энергия движения. Сила F, действуя на тело, совершает работу, и энергия тела возрастает на величину затраченной работы, т.е. dA = dW. (7.7). По второму закону Ньютона F = m(dv/dt) (7.8). и умножив обе части равенства на dr, получим Fdr = m.dv.dr/dt = dA (7.9). и зная, что v = dr/dt, dA = mvdv/dt = dW. (7.10). Проинтегрировав уравнение, найдем, что кинетическая энергия равна W = (mv2)/2. (7.11). Теорема о кинетической энергии справедлива и когда тело движется под действием изменяющейся силы, направление которой не совпадает с направлением перемещения. Кинетическая энергия механической системы равна сумме кинетических энергий всех частей этой системы.
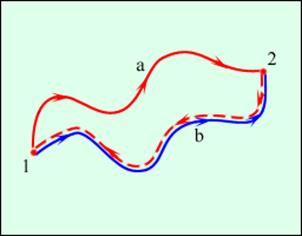
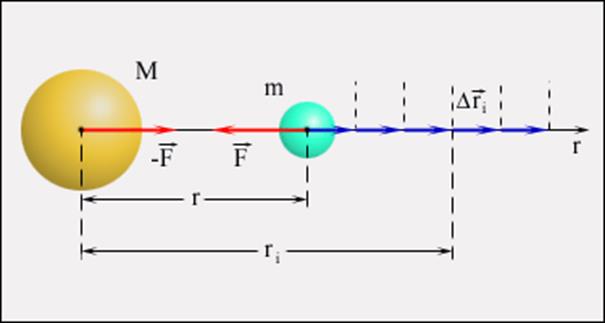
ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ. Потенциальная энергия – это энергии взаимодействия тел. Потенциальная энергия вводится только для сил, работа которых не зависит от траектории движения тела и определяется только начальным и конечным положениями. Взаимодействие тел осуществляется через силовые поля. Тело в потенциальном поле имеет энергию Wn.. Работа при малом изменении конфигурации системы равна приращению потенциальной энергии (со знаком минус), поскольку она совершается за счет убыли потенциальной энергии: dA = - dWn. (7.12). dA это скалярное произведение силы F на перемещение dr: Fdr=- dWn. (7.13).
Отсюда сила F по модулю и направлению F=-dWn/dr, (7.14). а потенциальная энергия Wn=- ò Fdr+C, (7.15). где С - постоянная интегрирования, т.е. потенциальная энергия определяется с точностью до постоянной. Для консервативных сил Fx = - dWn/dx, Fy = - dWn/dy, Fz = - dWn/dz, F = -gradWn. (7.16).
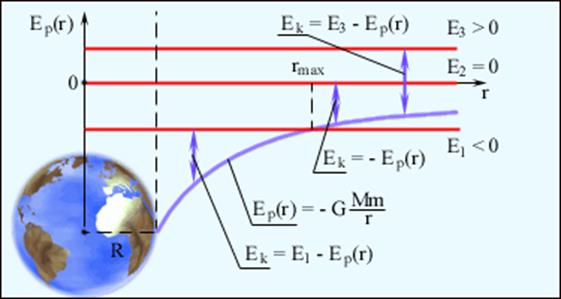
Конкретный вид функции Wn зависит от характера поля. Так потенциальная энергия тела массой m на высоте h над Землей Wn = mgh, (7.17). где высота h отсчитывается от нулевого уровня, на котором Wn = 0.
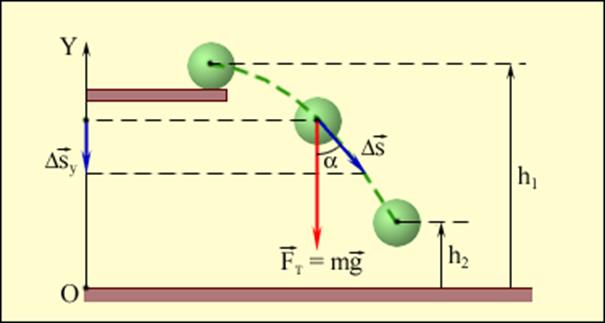
Для упруго деформированного тела сила упругости пропорциональна величине деформации Fупр = - kx, (7.18). где k - коэффициент упругости. По третьему закону Ньютона, Fдеф= - Fупр = kx. (7.19). Работа dA, совершаемая силой Fдеф, при малой деформации dx, dA = Fдефdx = kxdx, (7.20). а полная работа A = ò kxdx = kò xdx = (kx2)/2 (7.21). идет на увеличение потенциальной энергии деформированного тела, Wn = (kx2)/2. (7.22). На тело вблизи поверхности Земли, действует сила тяжести F = mg. (7.23). Работу силы тяжести можно записать в проекциях вектора перемещения Δ s на ось OY, направленную вертикально вверх: A = FTΔ scosά = mgΔ sv. (7.24). Где FT = F Tv = - mg. (7.25). – проекция силы тяжести, Δ sv. – проекция вектора перемещения. При подъеме тела вверх сила тяжести совершает отрицательную работу, так как Δ sv.> 0. Если тело переместилось из точки, расположенной на высоте h1, в точку, расположенную на высоте h2 от начала координатной оси OY , то сила тяжести совершила работу A = - mg(h2 – h1) = - - (mgh2 – mgh1). (7.26). Эта работа равна изменению mgh, взятому с противоположным знаком. Эту величину называют потенциальной энергией тела в поле силы тяжести Wp = mgh. (7.27). Она равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень. Потенциальная энергия Wp зависит от выбора начала координат оси OY. Физический смысл имеет не сама потенциальная энергия, а ее изменение Δ Wp = (Wp2 – Wp1). (7.28). Это изменение не зависит от выбора нулевого уровня. Понятие потенциальной энергии справедливо и для упругой силы. Работа равна работе внешней силы A, взятой с противоположным знаком. Aупр. = - A = -(kx2/2). (7.29). Где k – жесткость пружины. Потенциальной энергией упруго деформированного тела называют величину Wp = (kx2/2). (7.30). Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 830; Нарушение авторского права страницы