|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Потенциальная энергия упруго деформированного тела равна работе силы упругости при переходе из данного состояния в состояние с нулевой деформацией.
Сила упругости совершит работу, равную изменению потенциальной энергии, взятому с противоположным знаком: Aупр. = - (Wp2 - Wp1) = - (kx22/2 – kx12/2). (7.31). Потенциальная энергия при упругой деформации – это энергия взаимодействия отдельных частей тела между собой силами упругости. Измеряя работу потенциальных сил, приложенных к системе, можно найти только разность значений потенциальной энергии системы в двух её состояний: начальном и конечном. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ. z: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Если тела, составляющие замкнутую механическую систему, взаимодействуют между собой только силами тяготения и упругости, то работа этих сил равна изменению потенциальной энергии, взятому с противоположным знаком: A. = - (Wp2 - Wp1). (7.32). По теореме о кинетической энергии эта работа равна изменению кинетической энергии тел. A. = - (Wk2 - Wk1). (7.33). B. Следовательно (Wk2 - Wk1) = - (Wp2 - Wp1). (7.34). Или Wk1 + Wp1= Wk2 + Wp2. (7.35). Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и силами упругости, остается неизменной. Сумму W = Wk + Wp. (7.36). Называют полной энергией. Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой консервативными силами, то есть силами, для которых можно ввести понятие потенциальной энергии. Если между телами, составляющими замкнутую систему, действуют силы трения, то механическая энергия не сохраняется. Часть механической энергии превращается во внутреннюю энергию. При любых физических взаимодействиях энергия не возникает и не исчезает. Она лишь превращается из одной формы в другую. Это фундаментальный закон природы. Закон изменения механической энергии: изменение механической энергии системы равно алгебраической сумме работ всех не потенциальных сил, действующих на систему, и изменения потенциальной энергии системы за рассматриваемый промежуток времени, обусловленного не стационарностью внешних потенциальных сил.
.
Лекция № 8. МОМЕНТ ИНЕРЦИИ.
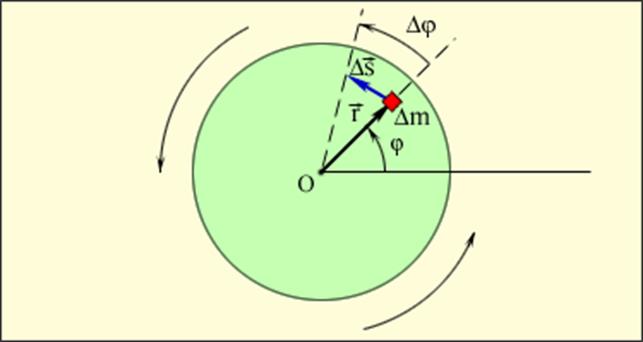
Моментом инерции системы относительно оси вращения называется физическая величина, равная сумме произведений масс точек системы на квадраты их расстояний до оси: J = Smiri2 ( J = ò r2dm), (8.1). Рис. 55. сложение производится по всему объему тела. Найдем момент инерции однородного сплошного цилиндра высотой h и радиусом R относительно его оси. Разделим большой цилиндр на отдельные полые концентрические цилиндры малой толщины dr с внутренним радиусом r и внешним радиусом r + dr. Момент инерции каждого полого цилиндра dJ = r2dm (8.2). (т.к. dr< < r, то считаем, что расстояние всех точек цилиндра от оси равно r ), где dm - масса элементарного цилиндра; его объем 2prhdr. Если r - плотность материала, то dm = r2prhdr (8.3). и dJ = 2prhr3dr. (8.4).
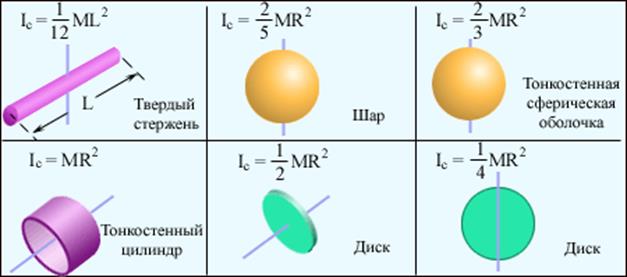
Момент инерции сплошного цилиндра J = ò dJ =2phr.0ò Rr3dr = (1/2).phR4r, (8.5). но так как phR2 - объем цилиндра, и его масса m=phR2r, (8.6). то J=(1/2).mR2. (8.7). МОМЕНТЫ ИНЕРЦИИ НЕКОТОРЫХ ТЕЛ.
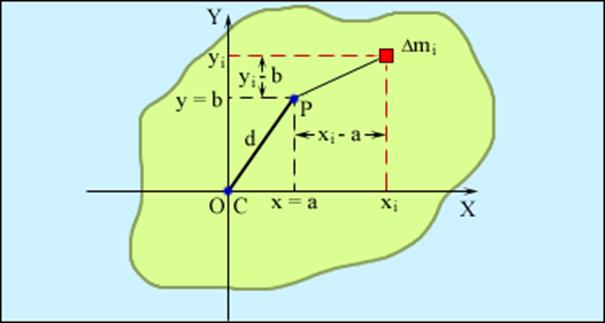
ТЕОРЕМА ШТЕЙНЕРА. Момент инерции тела J относительно любой оси вращения равен моменту его инерции J0 относительно параллельной оси, проходящей через центр его масс, плюс произведение массы тела m на квадрат расстояния a2 между осями: J = J0 + ma2. (8.8).
КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ВРАЩЕНИЯ. Кинетическая энергия вращающегося тела является суммой кинетических энергий его элементарных объемов Wk.вр.=Smivi2/2. (8.9). Заменяя линейные скорости на угловые, получим Wk.вр. = (mw2r2)/2 = (mr2w2)/2 = (Jw2)/2, (8.10). где J - момент инерции ( mr2 ) относительно оси z. Из сравнения кинетических энергий поступательного и вращательного движений, следует, что момент инерции является мерой инертности тела при вращательном движении. Если тело участвует одновременно в поступательном и вращательном движениях, то энергия движения складывается из энергий двух этих движений. МОМЕНТ СИЛЫ. Моментом силы относительно неподвижной точки О, называется физическая величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки О в точку приложения силы, на силу F: М = [r.F]. M (8.11). - псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к F. Модуль |M| = Fr. sina = F.l, (8.12). где l = r.sina - кратчайшее расстояние между линией действия силы и точкой ее приложения (плечо силы). Вектор M0 имеет проекции на оси координат Mx = yFz – zFy, My = - xFz + zFx, Mz = xMy –yFx. (8.13). называемые моментами силы F относительно осей Х, У и Z. Если оси координат взаимно ортогональны, то M0 = √ Mx2 + My2 + Mz2. (8.14).
Рис. 58. Парой сил называют совокупность двух равных по модулю, параллельных и противоположно направленных сил. Плоскость, в которой они действуют, называют плоскостью пары. Векторный момент пары является свободным вектором, т.е. он характеризуется лишь величиной M = Fh (8.15). и направлением, а точка приложения произвольна. Система действующих на твердое тело пар с моментами M1, M2 ….. Mn эквивалентна одной паре, называемой равнодействующей M = ∑ Mk. (8.16). Условие равновесия системы пар сил имеет вид M = ∑ Mk.= 0. (8.17). Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 796; Нарушение авторского права страницы
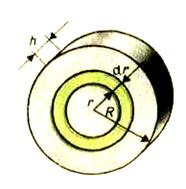 Рис. 43. Момент инерции.
Рис. 43. Момент инерции.