|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Краткая характеристика структуры и функций основных подразделений предприятия, обеспечивающих функционирование ПТСДМ.Стр 1 из 7Следующая ⇒
Краткая характеристика структуры и функций основных подразделений предприятия, обеспечивающих функционирование ПТСДМ. Функционирование, обслуживание и ремонт ПТСДМ на предприятии ООО «ТРАК ЦЕНТР» в городе Пенза осуществляется инженерно-техническим работником, ответственным за содержание грузоподъемных механизмов в исправном состоянии. Инженерно-технический работник, ответственный за безопасное содержание грузоподъемных механизмов обязан: - следить за исправным состоянием всех механизмов, исправным состоянием каната, механизма подъема груза, температурой нагрева электродвигателей тележки и тельфера, которая не должна превышать - за четкой работой тормозов механизма подъема и тележки; - проверять при ежесменном осмотре состояние всех болтовых соединений, стопорных устройств опорных тележек, смазочных устройств, каната и его крепления; - знать сроки и результаты проведения ТО ГПМ. - обеспечивать периодические осмотры, техническое обслуживание и ремонт, обеспечивающие содержание грузоподъемных машин, крановых путей, съемных грузозахватных приспособлений и тары в исправном состоянии; При выявлении неисправностей, нарушений настоящих Требований при работе грузоподъемных машин и их обслуживании лицо контроля, обеспечивающее безопасную эксплуатацию грузоподъемных машин, принимает меры по их устранению, а в случае необходимости останавливает машину. Не допускается эксплуатация грузоподъемной машины при: 1) выявлении неисправностей тормозов, блоков, канатов и их крепления цепей, крюков, лебедок, ходовых колес, блокировочных устройств и приборов безопасности, несоответствия электросхемы крана проекту; 2) наличии трещин и деформаций в несущих металлоконструкциях; 3) выявлении неисправностей кранового пути (приложение 10); 4) истечении срока технического освидетельствования или нормативного срока службы машины; 6) отсутствии регистрации грузоподъемной машины; 7) отсутствии соответствующих массе и характеру перемещаемых грузов съемных грузозахватных приспособлений и тары или их неисправности; 8) невыполнении указаний лиц контроля или предписаний государственных инспекторов; 9) неисправности заземления или электрооборудования; 321. Для управления грузоподъемными машинами и их обслуживанием владелец назначает крановщиков, слесарей, электромонтеров. Для зацепки и обвязки (строповки) груза на крюк грузоподъемной машины назначаются стропальщики. В качестве стропальщиков допускаются рабочие (такелажники, монтажники и другие профессии), обученные выполнению работ по строповке груза. В случаях, когда зона, обслуживаемая грузоподъемной машиной, полностью не просматривается из кабины крановщика, и при отсутствии между крановщиком и стропальщиком радио или телефонной связи для передачи сигнала стропальщика крановщику назначается сигнальщик из числа стропальщиков. Крановщики и их помощники, переводимые с крана одного типа на кран другого типа (например, с башенного на мостовой), перед переводом обучаются и аттестуются на данный тип крана. При переводе крановщиков и их помощников с одного крана на другой того же типа, но другой модели, индекса или с другим приводом, они знакомятся с особенностями устройства и обслуживания такого крана и проходят стажировку. После проверки знаний и практических навыков эти работники допускаются к самостоятельной работе. Допуск к работе крановщиков, их помощников, слесарей, электромонтеров, наладчиков приборов безопасности и стропальщиков оформляется приказом владельца крана. Рабочие основных профессий (станочник, монтажник и других профессий), имеющие удостоверение на право обслуживания, допускаются к управлению грузоподъемной машиной с пола или со стационарного пульта и к зацепке груза на крюк такой машины после проверки навыков по управлению машиной и строповке грузов. К управлению кранами по радио допускаются рабочие, имеющие профессию и удостоверение крановщика. Сигнальщиками допускаются рабочие из числа аттестованных стропальщиков. Крановщики проводят осмотр грузоподъемных машин перед началом работы, для чего владельцем крана выделяется соответствующее время.
Рисунок 1 – Подъем двигателя за рымболты.
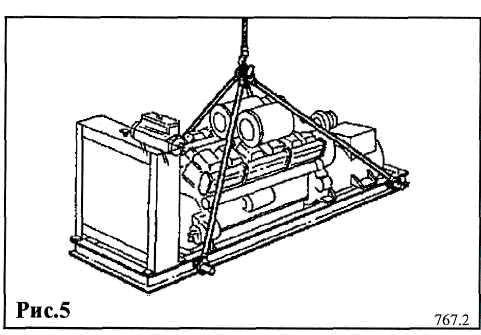
Рисунок 2 – Подъем двигателя на грузоподъемной оправе.
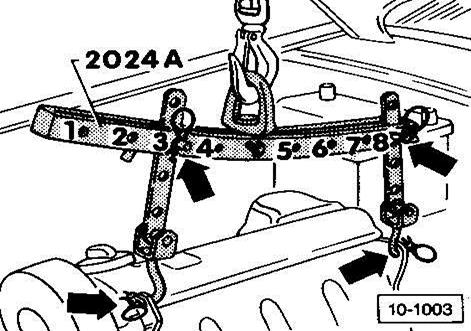
Рисунок 3 – Универсальная стропа для подъема ДВС.
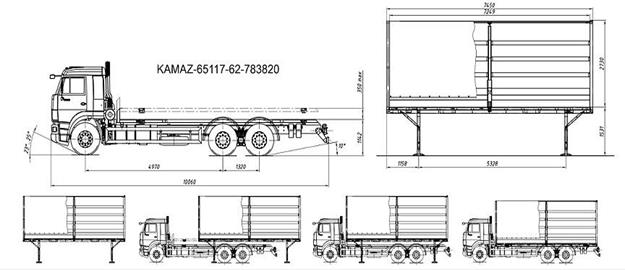
- кузова грузовых автомобилей, размерами: длиной – от 1000мм до 9000мм, шириной – от 500мм до 3000мм, высотой до 4500мм; формы – прямоугольной; бортовые, самосвальные, тентованые, цельнометаллические, изотермические, рефрижераторные и цистерны различного назначения; массой – от 20кг до 5000кг; изготовленных из стали, алюминиевых сплавов, древесины, пластика.
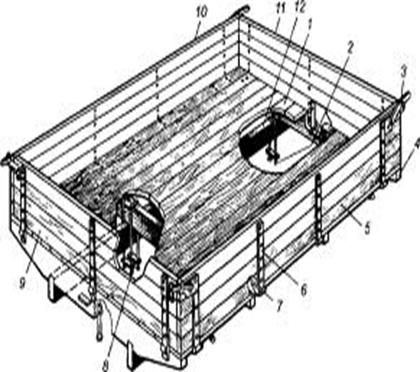
Рисунок 4 – Подъем кузова грузового автомобиля при помощи грузоподъемных опор.
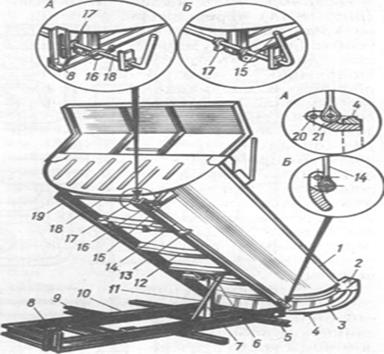
Рисунок 5 – Проушины для подъема самосвального кузова грузового автомобиля.
Рисунок 6 – Бортовой кузов грузового автомобиля и места для крепления строп для его подъема.
- кабины грузовых автомобилей, размерами: длиной – от 1000мм до 5000мм, шириной – от 1000мм до 3000мм, высотой до 4500мм; формы – прямоугольной; массой – от 20кг до 2000кг; изготовленных из стали, алюминиевых сплавов, пластика.
Рисунок 7 – Кабины грузовых автомобилей и места для зацепления их стропами.
- разукомплектованные рамы грузовых автомобилей, размерами: длиной – от 1000мм до 12000мм, шириной – от 500мм до 2500мм, высотой до 1000мм; формы – прямоугольной; массой – от 20кг до 5000кг; изготовленных из стали.
Рисунок 8 – Рама грузового автомобиля.
- колеса грузовых автомобилей, радиусом от 500мм до 2000мм; формы – округлой; массой – от 5кг до 5000кг; изготовленных из стали и резины.
Рисунок 9 – Приспособление для снятия и транспортировки колес грузового автомобиля.
- запчасти упакованные в коробки и установленные на евро поддоны.
Рисунок 10 – Транспортировка груза установленного на европоддон вилочным погрузчиком.
3. Характеристика грузопотоков (цель подъема, направления и интенсивность перемещения грузов). Планировка производственного участка. На предприятии ООО «ТРАК ЦЕНТР» в городе Пенза, ПТСДМ используются для подъема и перемещения узлов и агрегатов, автомобилей находящихся на ремонте и обслуживании, а также для разгрузки вновь прибывающих запчастей. Цели подъема узлов и агрегатов: - для центрирования с сопрягаемыми деталями; - для снятия с автомобиля и отправки в цеха мойки, ремонта, покраски.
Планировка производственного участка:
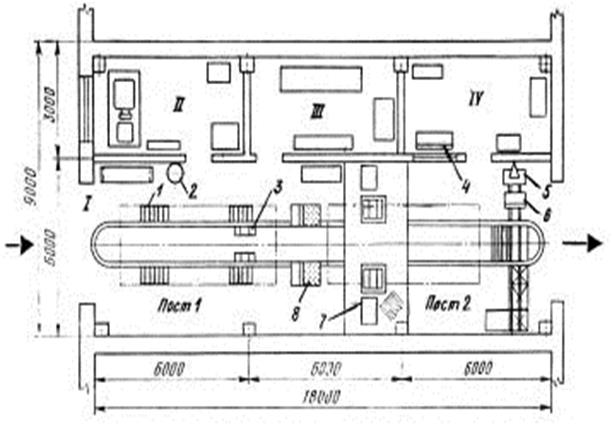
Рисунок 10 – Универсальный участок диагностирования для грузовых автомобилей и автобусов (двухпостовой вариант): I – помещение постов диагностирования; II – машинное отделение; III – помещение для работ по обслуживанию стендов и приборов; IV – помещение операторов; 1 – установка для обдува колес горячим воздухом; 2 – автоматическая воздухораздаточная колонка для подкачки шин; 3 – гидроподъемник; 4 – пульт управления; 5 – стенд для проверки электрооборудования, включая систему зажигания; 6 – прибор для проверки установки фар; 7 – стенд для проверки тормозных и тягово-экономических свойств автомобиля; 8 – площадочный стенд для проверки углов установки управляемых колес.
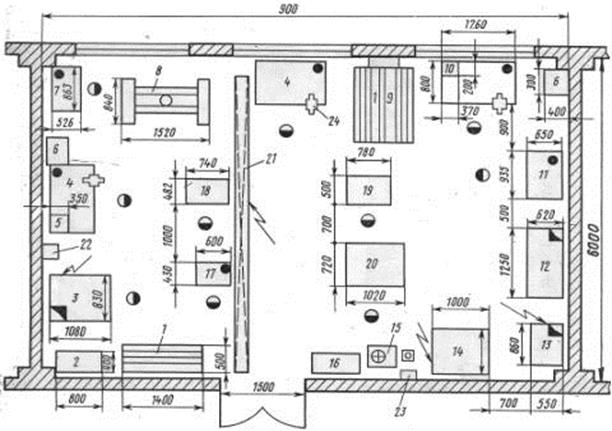
Рисунок 11 – Планировка рабочего места слесаря по ремонту агрегатов: 1 – стеллаж для деталей; 2 – ларь для обтирочных материалов; 3 – станок для расточки тормозных барабанов; 4 – слесарный верстак; 5 – радиально-сверлильный настольный станок; 6 – настенный шкаф для приборов и инструментов; 7 – стенд для разборки и регулировки сцеплений; 8 – гидравлический пресс 40 т; 9 – стеллаж для инструментов; 10 – настольно-верстачный пресс; 11 – стенд для ремонта карданных валов и рулевых механизмов; 12 – передвижная моечная ванна; 13 – заточный станок; 14 – вертикально-сверлильный станок; 15 – раковина для мытья; 16 – ларь для отходов; 17 – стенд для клепки тормозных накладок; 18 – стенд для ремонта редукторов задних мостов; 19 – стенд для ремонта коробок передач; 20 – стенд для ремонта передних и задних мостов; 21 – подвесная кран-балка; 22 – телефон и радио; 23 – электрический рукосушитель; 24 – тиски.
Рисунок 12 – Планировка рабочего места слесаря по ремонту двигателей:
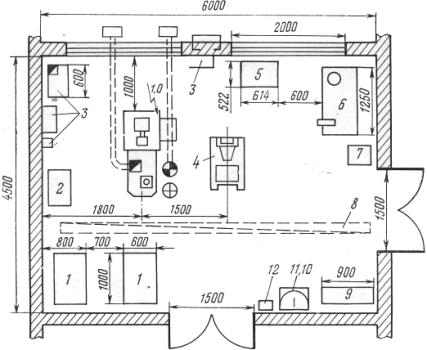
Рисунок 12 – Планировка рабочего места слесаря-обкатчика: 1 – подставка для хранения двигателей; 2 – стеллаж для хранения узлов двигателя; 3 – приспособление для установки двигателя; 4 – стенд для осмотра двигателей; 5 – инструментальная тумбочка; 6 – слесарный верстак; 7 – ларь для отходов; 8 – кран-балка; 9 – шкаф; 10 – раковина для мытья рук; 11 – зеркало; 12 – электрический рукосушитель.
Рисунок 13 – Планировка рабочего места шиномонтажника: 1 – силовой щит; 2 – приспособление для правки замочных колец; 3 – станок для очистки ободов дисков; 4 – верстак; 5 – сушильная камера; 6 – стеллаж; 7 – пылесос (он же пульверизатор); 8 – стенд для демонтажа колес; 9 – площадка для монтажа колес; 10 – воздухораздаточная колонка; 11 – машина для мойки колес; 12 – стальная эмалированная раковина; 13 – электрический рукосушитель; 14 – подвесная кран-балка; 15 – вешалка для хранения камер; 16 – шкаф для хранения средств защиты; 17 – стеллаж для хранения колес и покрышек; 18 – предохранительная клеть для накачивания шин; 19 – ящик для хранения песка.
Рисунок 14 – Объемно-планировочная схема производственного
Рисунок 15 – Таль ручная цепная.
Тельферы – это специальные устройства для подъема и опускания грузов, которые крепятся к крюку. По конструкции изделия классифицируются на ручные (с соответствующим приводом) и электрические (оборудованные электроприводом). На предприятиях может применяться еще одна модификация – устройство, размещенное на каретке. Их отличие состоит в возможности транспортировки по горизонтальной оси по монорельсовым путям. Механическое оборудование можно разделить на изделия с рычажной и шестеренной конструкцией управления. Шестеренное оснащено тяговыми и грузовыми цепями. Грузовые предназначены для передачи усилия посредством редуктора механического типа и приводятся в действие оператором. При необходимости тельфер можно закрепить над опорой на относительно большой высоте. Управление движением оборудования при этом осуществляется с помощью дистанционного пульта. Шестеренные приспособления характеризуются небольшим объемом транспортируемых предметов, в связи с этим оператор должен постоянно находиться близко к точке подвески тельфера. Движение осуществляется посредством рычага. Максимальная высота подъема не превышает человеческий рост. Таль тельфер с электроприводом бывает канатной и цепной. Вторые используют на кранах консольно-поворотного типа. Небольшая масса и компактность позволяют пользоваться ими в качестве дополнительного устройства для перемещения и поднятия различных предметов. Электротали канатного типа работают на тяжелых мостовых кранах и монорельсах в среднем и тяжелом режимах эксплуатации. Они выпускается для стационарных и передвижных установок.
Рисунок 16 – Таль тельфер. Вилочные погрузчики – это специальный транспорт, служащий для погрузки, перемещения, разгрузки, штабелирования разнообразной клади. При этом могут использоваться как вилы, так и иное навесное оснащение.
Рисунок 17 – Вилочный погрузчик. Погрузчик может быть оснащен ДВС или электродвигателем. Последние разновидности практически бесшумны. Они отличаются простотой и экологичностью, способны работать в закрытых складских помещениях. Тем не менее, такие машины требуют регулярной подзарядки тяговых батарей и наличия для этого специального оснащения. Погрузчики с ДВС могут быть газовыми, дизельными, бензиновыми (газобензиновыми). Такая спецтехника работает преимущественно на открытых площадках. Эти машины более шумны. Двигатели вырабатывают тепло, производят выхлопные газы, затрудняющие работу в помещениях. Высота и тип мачты, грузоподъемность и габариты перемещаемых спецтехникой грузов тесно увязаны между собой. Надо сказать, что зачастую технические характеристики вилочных погрузчиков и область применения соответствуют типу мачты, которая сможет быть:
Технику, оснащенную мачтами последних двух видов, очень удобно использовать в стесненных условиях, скажем, вагонах, кузовах фур и пр. Тип шин. Существует несколько разновидностей шин для погрузчиков:
Первые характеризуются тонким амортизирующим слоем и весьма требовательны к ровности и качеству напольного покрытия. Пневмошины отличает доступная цена и хорошая амортизация ударов. Изделия из суперэластика (цельные) не пробиваются, а потому более долговечны и дороги, нежели пневматические. Центр тяжести машины. Обычно центр тяжести такой спецтехники расположен выше колесной базы. Грузоподъемность и некоторые иные характеристики вилочных погрузчиков основываются на точке его размещения. Расположение центра тяжести меняется в зависимости от бокового смещения вил, загрузки, высоты подъема клади, отклонения мачты, центра нагрузки. Трансмиссия. Может быть автоматической и механической. Первый вариант предпочтительнее, поскольку погрузчику приходится выполнять массу маневров, причем нередко в ограниченном пространстве. Второй уместнее, если погрузчику приходится преодолевать значительные расстояния, либо перемещаться по скользкой поверхности. Кроме того, вилочные погрузчики характеризуют:
Итак, технические характеристики вилочных погрузчиков находятся в прямой зависимости от целого ряда названных параметров, свойственных каждой модели. Лишь основываясь на знаниях о предполагаемой специфике работы (условиях использования техники, типе перемещаемого груза и пр.) можно подобрать максимально отвечающее задачам спецсредство. Домкраты бутылочные, грузоподъемностью до 8т.
Рисунок 18 – Бутылочные домкраты. Домкраты подкатные, грузоподъемностью до 5тонн.
Рисунок 19 – Подкатные домкраты.
Гидравлическая подкатная тележка для грузовых колес предназначена для снятия, установки и транспортировки одиночных и сдвоенных колёс грузовых автомобилей. Лапы регулируются под диаметр колеса.
Рисунок 20 – Гидравлическая подкатная тележка. А также различный измерительный инструмент – линейки, штанген- и микрометрический инструмент, компрессометры, измерители давления, приборы для проверки аккумуляторов, динамометрические ключи. Также очень много разнообразных ключей – специальных, ступичных, свечных, баллонных (торцевых и механических гайковертов). Нельзя забывать и про различный технический вспомогательный инструмент, типа съемников шкивов и подшипников, домкратов, пневмоинструментов и т.п. Технические данные
Описание Тележка для снятия и транспортировки колес грузовых автомобилей, автобусов, сельскохозяйственной техники. Позволяет снимать и транспортировать колеса и колесные пары в сборе. Привод подъема колеса - гидравлический домкрат. Максимальная грузоподъемность 1т.
Рисунок 21 – Тележка для снятия и транспортировки колес грузовых автомобилей. Рисунок 22 – Клещевые захваты. Клещевые (зажимные) грузозахватные приспособления в зависимости от исполнения конструкции могут работать с грузами различной геометрической формы. Захват представляет собой рычажную систему, фиксация груза осуществляется за счет обхвата свободными концами рычагов выступающих элементов груза, например головку рельса, полку балки, закраины бочки или непосредственно сам груз. Разновидностью клещевых захватов являются фрикционно-зажимные приспособления. Удержание груза при их использовании осуществляется за счет силы трения, возникающей при сжатии груза или распора его изнутри прижимными элементами (лапами). Захваты клещевого типа часто применяются для подъема и перемещения труб, бетонных блоков и сортового проката.
Рисунок 23 – Вилочные захваты. Вилочные (лапчатые) грузозахватные приспособления предназначены для подхвата груза лежащего на подкладках и поддонах, имеющего специальные технологические отверстия, монтажные петли или полости. Особенностью захватов данного вида является положение груза при его подъеме и перемещении — центр тяжести груза должен находится на одной вертикали с точкой подвеса захвата на крюк грузоподъемного механизма, это обязательное условия для предотвращения самопроизвольного падения груза с лап. Для выравнивания центра тяжести используют противовесы, автоматически или вручную перемещаемые точки подвеса захвата, демпферные устройства и т. д. Вилочные захваты применяют для компактного размещения пакетированных грузов, грузов на поддонах, а так же перемещения строительных материалов в горизонтальном положении (например бетонные кольца, бухты проволоки, лестничные пролеты и т. д.).
Рисунок 23 – Эксцентриковые захваты Эксцентриковые грузозахватные приспособления предназначены для захвата и перемещения плоских грузов в вертикальном или горизонтальном положении. Принцип действия захватов данного типа состоит в преобразовании эксцентриком подъемной силы в зажимающее усилие. Рабочие элементы груза создают значительную контактную нагрузку, поэтому их применение ограничивается работой с грузами с относительно твердой поверхностью. Наиболее часто эксцентриковые захваты применяются для подъема и перемещения листов металла различной толщины как по отдельности, так и стопками. Современные эксцентриковые захваты выполняются как самозатягивающиеся (с принудительным подведением эксцентрика к поверхности груза при его подъеме), однако существуют так же захваты при работе с которыми необходим ручной первоначальный зажим груза с небольшим усилием. Более подробно об эксцентриковых захватах говорится в ранее опубликованных статьях.
Рисунок 24 – Винтовые (струбцинные) захваты.
Струбцины в традиционном понимании это приспособления для крепежа различных деталей и максимально плотного соединения их между собой. Для винтовых приспособлений применяемых при проведении подъемно-транспортных работ основной функцией стали перемещение и кантование грузов. Фиксация грузов осуществляется с помощью винтовой передачи вручную, при этом создается контактная нагрузка, которая за счет силы трения не позволяет грузу выскользнуть. Так как создаваемая нагрузка велика, применение струбцин обычно ограничивают использованием с грузами имеющими твердую поверхность, как правило это листы металлы и сортовой прокат. Для более бережного обращения изделия с грузами на рабочие органы захвата устанавливают накладки а также увеличивают их площадь, такое решение было реализовано при разработке захвата для сэндвич-панелей.
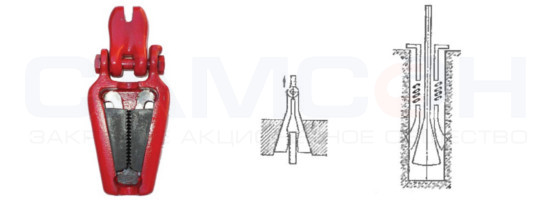
Рисунок 25 – Штырево-строповые захваты. Штыревые захваты используются только совместно со стропами и служат для удобной дистанционной расстроповки грузов. Конструкций захватов данного вида довольно много, отличительной особенностью захватов является наличие подвижного штыря, посредством оттяжки которого и производится удаленная расстроповка. Приспособление применяется при подъеме стальных, железобетонных конструкций и технологического оборудования способом строповки «на удавку».
Рисунок 26 – Коромысловые захваты.
Коромысловые грузозахватные приспособления применяются при работе с грузами имеющими сквозные отверстия, под которыми можно разместить поворотный, вокруг вертикальной или горизонтальной оси, несущий элемент (коромысло), воспринимающий вес груза. Как правило такое приспособление состоит из коромысла и гибкого элемента (канатного или цепного стропа), так же возможна реализация приспособления с жесткой металлической тягой. В случае если отверстие груза имеет небольшой диаметр или само коромысло имеет большой вес и не способно повернуться вокруг своей оси при установке/извлечении, применяют тросик для поворота коромысла снаружи. Коромысловые приспособления используются при работе с железобетонными панелями и плитами перекрытий, бетонными кольцами, бобинами и кабельными барабанами, а так же аналогичными грузами имеющими технологические отверстия.
Рисунок 27 – Клиновые захваты.
Клиновые грузозахватные приспособления предназначены для подъема и перемещения грузов, имеющих полость (как правило это круглое отверстие) для взаимодействия с распорными элементами захвата. Конструкция захвата состоит из подвижных в горизонтальной плоскости распорных элементов и конусообразного клина. Захваты данного типа сейчас применяются крайне редко, однако они могут быть хорошей альтернативой для работы с грузами не имеющими монтажных петель. Для подъема груза клиновой захват вводится в глухое или сквозное технологическое отверстие, при подъеме клин раздвигает распорные элементы и их зубья врезаются в стенки отверстия. Это происходит до тех пор, пока не наступит состояние равновесия, когда внутренние силы сопротивления растяжению (раскалыванию) будут равны внешней силе — весу груза, после чего происходит его подъем.
Рисунок 28 – Вакуумные захваты.
Одним из наиболее современных грузозахватных приспособлений являются вакуумные захваты. Принцип работы захватов заключается в следующем — в установленной на поверхности груза камере создается область разреженного воздуха (вакуум), под действием атмосферного давления возникает сила взаимодействия (притяжения) между грузом и захватом. Для работы данным захватом есть ограничение — груз должен быть выполнен из относительно воздухонепроницаемого материала с гладкой поверхностью (стекло, прокат металла, полированный мрамор и т. д.). Вакуумные захваты удобны для работы с грузами не имеющими точек крепления, при этом позволяют быстро произвести его захват и высвобождение, захват бережно относится к поверхности поднимаемого груза и осуществляет подъем не повреждая её. Конструкция захватов данного вида и характер их использования зависит от способа создания разрежения в вакуумной камере и методов её девакуумизации.
Рисунк 29 – Грузозахватные приспособления: а, б, в, г — простейшие грузозахватные приспособления (способы вязки канатов с коушами); д — быстродействующий клещевой захват; е — эксцентриковый захват; ж — бадья; з — кюбель; и — грейфер; к — электромагнит. Требования промышленной безопасности к устройству и безопасной эксплуатации грузоподъемных механизмов
Общие положения
1. Настоящие Требования распространяются на проектирование, устройство, изготовление, установку, ремонт, реконструкцию и эксплуатацию грузоподъемных механизмов (машин) (далее – ГПМ)*, грузозахватных органов, приспособлений и тары. 2. Настоящие Требования распространяются на грузоподъемные краны всех типов, включая краны-манипуляторы. Технические требования
5. Возможность работы грузоподъемной машины во взрывопожароопасной среде (с указанием категории среды) указывается в паспорте, методических рекомендациях по эксплуатации. 6. Проектирование и изготовление грузоподъемных машин, предназначенных для эксплуатации в районах с расчетной температурой ниже -40°С, осуществляется в соответствии с температурным режимом. Проектирование и изготовление грузоподъемных машин, предназначенных для эксплуатации в сейсмических районах (более 6 балов), согласно СНиП РК 2.03-30 осуществляются в сейсмостойком исполнении. 7. Проектирование грузоподъемных машин выполняется в соответствии со стандартом ИСО 4301/1 и другой нормативной документацией. 8. Стреловые самоходные, железнодорожные и прицепные краны, краны-экскаваторы, башенные и портальные краны устойчивы в рабочем, нерабочем состоянии и транспортном положении. Расчет устойчивости крана производится при действии испытательной нагрузки, действии груза (грузовая устойчивость), отсутствии груза (собственная устойчивость), внезапном снятии нагрузки и монтаже (демонтаже). У кранов, по условиям эксплуатации которых требуется опускание ненагруженной стрелы в горизонтальное положение, обеспечивается устойчивость при таком положении стрелы. 9. Уклон пути грузовых тележек у козловых и консольных кранов при наиболее неблагоприятном положении тележки с наибольшим рабочим грузом не превышает 0, 003. Указанная норма уклона не относится к кранам, у которых механизм передвижения тележки оборудован автоматическим тормозом нормально закрытого типа или у которых тележка перемещается канатной тягой. 10. Механизмы подъема груза и изменения вылета выполнены так, чтобы опускание груза или стрелы осуществлялось только двигателем. 11. Механизмы грузоподъемных машин, оборудованные кулачковыми, фрикционными или другими механическими приспособлениями для их включения или переключения скоростей рабочих движений, устроены таким образом, чтобы самопроизвольное включение или расцепление механизма было невозможно. У лебедок подъема груза и стрелы, кроме того, исключается возможность отключения привода без наложения тормоза. Применение фрикционных и кулачковых муфт включения в механизмах, предназначенных для подъема людей, расплавленного металла или шлака, ядовитых и взрывчатых веществ, в механизмах с электроприводом не допускается, за исключением: 1) механизма передвижения или поворота, имеющего несколько диапазонов скоростей для переключения с одной скорости на другую; 2) механизма передвижения гусеничных кранов с общим приводом двух гусениц для раздельного управления ими. В случаях, указанных в подпунктах 1) и 2), тормоз имеет неразрываемую кинематическую связь с поворотной частью крана, гусеницами или колесами. 12. В узлах механизмов грузоподъемной машины, передающих крутящий момент, применяются шлицевые, шпоночные и болтовые соединения. 13. Болтовые, шпоночные и клиновые соединения грузоподъемных машин предохраняются от произвольного развинчивания или разъединения. 14. У кранов, имеющих выдвижные стрелы и башни, предусматривается фиксация выдвинутой конструкции. 15. Подъемные механизмы ковочных кранов имеют амортизирующие устройства. 16. У канатных и цепных талей и полиспастов грузоподъемной машины исключается самопроизвольное спадание каната (цепи) с тали, заклинивание каната (цепи) между блоком и осью (звездочкой и осью). 17. При применении сдвоенного полиспаста установка уравнительного блока или балансира обязательна. 18. Тяговые колеса грузоподъемных машин с ручным приводом имеют направляющие для предотвращения спадания работающих на них цепей. Тяговая цепь принимается такой длины, чтобы нижняя ее часть находилась на высоте около 500 мм от поверхности, на которой находится рабочий, управляющий машиной. 19. Металлоконструкции и металлические детали грузоподъемных машин предохраняются от коррозии. В коробчатых и трубчатых металлоконструкциях кранов, работающих на открытом воздухе, предусматриваются меры против скопления в них влаги. 20. К механизмам, предохранительным устройствам, электрооборудованию, элементам металлоконструкций грузоподъемных машин, требующим технического обслуживания, обеспечивается безопасный доступ. Для этой цели устраиваются галереи, площадки, лестницы. При отсутствии площадок и лестниц для обслуживания блоков и приборов безопасности на стреле предусматривается возможность ее опускания. 21. Электрическое оборудование грузоподъемных машин, его монтаж, токоподвод и заземление отвечает требованиям Правил к устройству электроустановок. Эксплуатация электрического оборудования грузоподъемных машин производится в соответствии с требованиями Правил к безопасности эксплуатации электроустановок. 22. Для кранов с гидравлическим приводом обеспечивается автоматический останов и фиксация механизмов (поворота, грузовой и стреловой лебедок, подъема стрелы и выносных опор, выдвижения секций стрелы) при разрыве трубопроводов или падении давления в гидросистеме. Для кранов-манипуляторов, при обрыве гибких трубопроводов, обеспечивается автоматический останов механизмов. 23. Гидросистема кранов обеспечивает возможность контроля давления в каждом рабочем контуре и возможность замены гидроагрегатов, шлангов, фильтров без слива рабочей жидкости из бака. 24. Грузоподъемные краны оборудуются устройствами для учета наработки в моточасах. Устройства позволяют определять остаточный ресурс крана в процессе его эксплуатации. 25. Расчет стропов из стальных канатов производится с учетом числа ветвей канатов и угла наклона их к вертикали (приложение 2). При расчете стропов общего назначения, имеющих несколько ветвей, расчетный угол между ними принимается равным 90°. При расчете стропов, предназначенных для определенного груза, допускается принимать фактический угол. При расчете стропов коэффициент запаса прочности канатов принимается не менее 6. Конструкция многоветвевых стропов обеспечивает равномерное натяжение всех ветвей. 26. Расчет стропов из пеньковых, капроновых и хлопчатобумажных канатов (лент) производится с учетом числа ветвей канатов и угла наклона их к вертикали. При этом коэффициент запаса прочности принимается не менее 8.
Грузозахватные органы
80. Грузовые кованые и штампованные крюки изготовляются в соответствии с ГОСТ 2105 и конструкторской документацией. Размеры и основные параметры кованых и штампованных крюков принимаются в зависимости от типа крюка и рода привода грузоподъемной машины по ГОСТ 6627 и ГОСТ 6628. 81. Специальные кованые и штампованные крюки соответствуют конструкторской документации. 82. Крюки грузоподъемностью свыше 3 т устанавливаются на подшипниках качения, за исключением крюков кранов специального назначения. 83. Крепление кованого и штампованного крюка грузоподъемностью 5 т и выше, вилки пластинчатого крюка в траверсе исключает самопроизвольное свинчивание гайки, для чего она укрепляется стопорной планкой. Стопорение гайки посредством штифтов, шплинтов и стопорного болта не допускается. 84. Грузовые крюки кранов и электрических талей снабжаются предохранительным замком, предотвращающим самопроизвольное выпадение съемного грузозахватного приспособления. Грузовые крюки кранов, транспортирующих расплавленный металл или жидкий шлак, не допускается снабжать предохранительными замками. 86. Грузовые крюки специального исполнения снабжаются паспортом с указанием изготовителя, номера крюка, грузоподъемности и материала, из которого он изготовлен.
Канаты
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1012; Нарушение авторского права страницы
 ;
;