|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Раздел 1. Основы проектирования и расчёта общесудовых системСтр 1 из 5Следующая ⇒
Раздел 1. Основы проектирования и расчёта общесудовых систем
Тема 1.1. Назначение и классификация общесудовых систем.
Мореходные качества и обитаемость судна
Мореходные качества судна – это качества, определяющие способность судна безопасно совершать плавание, сохраняя живучесть в случае повреждения. К мореходным качествам относятся: Плавучесть – способность судна плавать при заданной нагрузке в заданном положении относительно поверхности воды. Положение судна относительно поверхности воды называется посадкой. Посадка характеризуется тремя величинами: средней осадкой Тср, углом крена q и углом дифферента f (рис. 1.1.1).
Рис. 1.1.1. Посадка судна Если q = 0, то говорят, что судно сидит прямо, если f = 0 - судно сидит на ровный киль. Необходимым условием плавания судна в равновесии является равенство силы тяжести и выталкивающей силы (силы Архимеда):
где m – масса судна, V – объёмное водоизмещение (объём погружённой части судна). Выражение (1.1.1.) – уравнение плавучести. D = Pпор. + DW, где Рпор. – водоизмещение порожнем (собственная масса судна), DW – дедвейт судна (грузоподьёмность), включающий в себя все массы, не входящие в водоизмещение судна порожнем DW = Pгр. + Рзап.. + Pэк.. Сила тяжести, как известно, приложена к центру тяжести (ЦТ) судна, а сила Архимеда – к геометрическому центру погружённого объёма, называемому центром величины (ЦВ). Для плавания прямо и на ровный киль необходимо, чтобы векторы сил Архимеда и тяжести находились на одной вертикали, то есть должны выполняться следующие условия для координат ЦТ и ЦВ:
Так как ЦВ лежит в диаметральной плоскости (ДП) судна, (1.1.3) принимает вид:
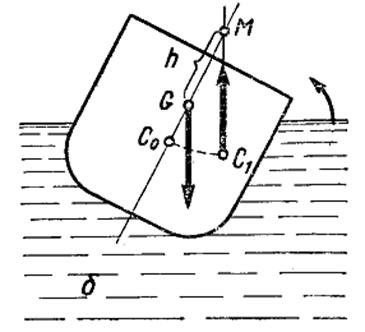
Объём водонепроницаемых отсеков выше ватерлинии называется запасом плавучести. Остойчивость – способность судна, выведенного из положения равновесия (получившего крен или дифферент) под воздействием внешних сил, возвращаться в исходное положение по окончании этого воздействия. Остойчивость при крене называется поперечной, при дифференте – продольной.
Рис. 1.1.2. Поперечная остойчивость При крене (рис. 1.1.2) ЦВ смещается из положения C0 в положение C1. На пересечении линии действия силы Архимеда с ДП находится так называемый метацентр М. По своему смыслу метацентр – это предельное положение ЦТ, при котором судно ещё сохраняет остойчивость. Таким образом, судно обладает остойчивостью, только если ЦТ G расположен ниже метацентра М. Расстояние межу М и G называется метацентрической высотой. Непотопляемость – способность судна оставаться на плаву и не опрокидываться в условиях затопления водой одного или нескольких отсеков. Таким образом, требование непотопляемости - сохранение остойчивости до полного исчерпания запаса плавучести. Ходкость – способность судна двигаться с заданной скоростью при эффективном использовании мощности энергетической установки. Качка – колебания судна под действием волн и других периодических сил. Характеризуется амплитудой и периодом. Управляемость – способность судна по мере необходимости изменять или сохранять курс.
Обитаемость судна – это комплексная характеристика судна, показывающая степень приспособленности его к жизнедеятельности человека в условиях плавания. Элементы обитаемости: размеры помещений, расположение оборудования, микроклимат, обеспечение бытовых нужд, а так же показатели качки, вибрации и шума.
Для обеспечения упомянутых качеств в процессе эксплуатации судов приходится решать следующие задачи: - обеспечение приёма и перекачивания жидкого балласта для спрямления крена и дифферента и замещения переменных грузов, - откачивание воды из затопленных помещений в ходе борьбы за непотопляемость, - поддержание необходимых параметров воздушной среды, - обеспечение санитарно-бытовых нужд (подача воды и удаление продуктов жизнедеятельности личного состава), - борьба с пожарами. Перечисленные задачи решаются посредством общесудовых систем.
Тема 1.2. Основы проектирования судовых систем.
Требования и порядок приоритетов при проектировании судовых систем.
Основные общие требования к судовым системам следующие: 1) Надежность в работе при всех условиях эксплуатации судна (крене, дифференте, качке); 2) Работоспособность при выходе из строя (повреждении) отдельных участков или механизмов; 3) Приемлемые массогабаритные показатели; 4) Стойкость применяемых материалов к коррозии и эрозии; 5) Применение для изготовления систем стандартных и типовых унифицированных конструктивных элементов, причем число типоразмеров их по возможности должно быть минимальным; 6) Достаточная экономичность аппаратов и механизмов систем; 7) Удобство расположения механизмов и арматуры для обслуживания и ремонта; 8) Исключение возможности загрязнения акватории водами, содержащими остатки нефтепродуктов и других вредных веществ.
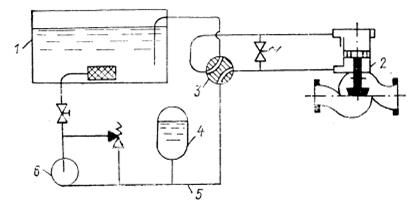
При проектировании судовых систем нужно учитывать ряд разнородных требований и условий разной степени важности. Для упорядочения проектной работы целесообразно сформировать определённый порядок приоритетов, которым нужно следовать при проектировании: 1) Соответствие условиям технического задания на проектирование судна. Естественно, что в первую очередь должны быть обеспечены требуемые показатели судна и выполнение им своих основных функций. Как правило, техническое задание не содержит явных требований к конкретным системам. Однако, назначение, архитектурно-конструктивный тип судна и его технические характеристики оказывают существенное влияние на общий технический облик судовых систем. 2) Выполнение требований нормативных документов, обязательных для предотвращения гибели судна, нанесения вреда здоровью экипажа и загрязнения окружающей среды. Основные нормативные документы, предъявляющие требования к общесудовым системам: - «Правила классификации и постройки морских судов» Российского морского регистра судоходства. Содержат основные требования ко всем судовым системам. Несмотря на многообразие этих требований, в основном они сводятся к обеспечению безопасности и надёжности.Выполнение этих требований обязательно для утверждения проекта судна Регистром. - «Санитарные правила для морских судов СССР (1982)». Регламентируют вопросы, связанные с обеспечением обитаемости для экипажа и пассажиров, а также предотвращением загрязнения с судов.Выполнение этих правил обязательно для утверждения проекта судна Санитарной инспекцией. - Международные конвенции: Конвенция по охране человеческой жизни на море (СОЛАС)– требования по безопасности и предотвращения нанесения вреда здоровью экипажа и пассажиров. Конвенция по предотвращению загрязнения моря с судов (МАРПОЛ) — требования по предотвращению загрязнения нефтесодержащими и сточными водами. Конвенция о контроле балластных вод и осадков и управлению ими— требования по уничтожению водных организмов в балластных водах. - Отраслевые стандарты (ОСТ) и руководящие документы (РД). Содержат правила и рекомендации по проектированию отдельных систем. В отличие от Правил Регистра, ряд положений ОСТ и РД носит рекомендательный характер (обязательными к применению являются только военные ОСТы и РД). Дистанционное управление. Для возможности дистанционного управления работой систем используется специальная арматура. Такая арматура по конструкции главных элементов аналогична арматуре с ручным управлением, только перемещающий запорный орган шпиндель приводится в движение специальным исполнительным механизмом. Основные требования к арматуре с дистанционным управлением: - осуществление надёжного контроля над закрытием и открытием арматуры; - обеспечение требуемой скорости срабатывания; - исключение самопроизвольного изменения режима работы управляемого объекта; - возможность использования в случае необходимости резервных средств управления (ручных); Для дистанционного управления арматурой может применяться гидропривод, пневмопривод и электропривод. 1. Гидропривод. В гидравлическом приводе потенциальная энергия (давление) жидкости, полученная в объёмном насосе, передаётся к исполнительному механизму и преобразуется в механическую работу открытия или закрытия арматуры. В качестве рабочих жидкостей в гидроприводах используют вязкие капельные жидкости, чаще всего минеральные масла высокой очистки. Для поддержания заданного давления (10 – 15 МПа) при неработающих насосах и обеспечения плавности срабатывания привода в его состав включают гидроаккумуляторы. В качестве распределительных устройств используются клапанные, крановые и золотниковые манипуляторы. В качестве исполнительных механизмов наибольшее распространение получили однополостные подпружиненные сервоприводы, двухполостные сервоприводы, реечные и рычажные гидромашинки, реже – гидромоторы. Схема гидропривода представлена на рисунке 1.3.2.12.
Рис. 1.3.2.12. Схема гидравлического привода. В состав привода входят бак с рабочей жидкостью (маслом) 1, насос 6, пневмогидроаккумулятор 4, трубопроводы 5, кран-манипулятор 3, исполнительный механизм 2 (двухполостной сервопривод), управляющий шпинделем клапана. С помощью крана-манипулятора поток масла направляется в одну из полостей гидроцилиндра 2, для другой полости одновременно открывается слив масла в бак. Достоинства гидропривода: надёжность и плавность работы, простота предохранения от перегрузок, возможность создания больших усилий и одновременного управления большим количеством арматуры, свобода компоновки. Недостатки: большая масса, сложность монтажа и контроля работы исполнительных механизмов. 2. Пневмопривод. По принципу действия пневматический привод подобен гидравлическому, с той разницей, что в качестве рабочей среды используется сжатый воздух давлением до 4, 5 МПа, получаемый от системы воздуха среднего давления. Управление впуском воздуха осуществляется краном-манипулятором. Системы пневмопривода выполняются открытыми (отработавший в исполнительном механизме воздух стравливается в атмосферу). Достоинства: пневматический привод легче гидравлического и проще по конструкции, обладает большей быстротой срабатывания. Недостатки: из-за стравливания воздуха работа пневмопривода сопровождается шумом, расширение воздуха приводит к неравномерности срабатывания. 3. Электропривод. Используется для преобразования электрической энергии в механическую работу закрытия или открытия арматуры. В состав привода входят: источник электроэнергии, электрокабели, пульт управления и исполнительный механизм. Питание электропривода осуществляется от общесудовой электросети или аккумуляторных батарей. По характеру движения выходного звена электроприводы подразделяют на: - поворотные, обеспечивающие поворот по дуге до 3600 (для управления кранами и поворотными затворами); - многооборотные, обеспечивающие вращательное движение выходного звена (для управления задвижками); - прямоходные, обеспечивающие поступательное движение выходного звена (для управления клапанами). В качестве исполнительных механизмов могут использоваться электродвигатели и электромагниты. Привод с электродвигателями получается весьма громоздким и требует значительных электрических мощностей, поэтому не получил распространения для управления судовой арматурой. В основном применяется электромагнитный привод, отличающийся малыми габаритами, быстротой действия и лёгкостью управления.
Для арматуры условным проходом до DУ50 наиболее компактным и технологичным является электропривод. Однако, его недостатком является необходимость обеспечения электрозащиты и пожарной безопасности. Для арматуры условным проходом более DУ50 наиболее компактным и технологичным является гидропривод и пневмопривод. Использование пневмопривода запрещается на арматуре, установленной внутри цистерн с жидкостью – обрыв трубопровода сжатого воздуха может привести к разрушению цистерны и гибели судна.
Схемы систем дистанционного управления арматурой. По принципу действия выделяются разомкнутые и следящие системы. Однополостные сервоприводы могут использоваться только в разомкнутых системах, двухполостные с фиксацией положения - и в тех, и в других. Разомкнутые системы. Нагнетатели рабочих сред.
Для перемещения рабочих сред по трубопроводам необходимо сообщить им определённый запас механической энергии. Повышение удельной механической энергии ( напора ) сред осуществляется нагнетателями (гидравлическими механизмами), которые бывают следующих типов: - для нагнетания жидких сред – насосы; - для нагнетания газообразных сред – вентиляторы, воздуходувки и компрессоры.
Каждый гидравлический механизм характеризуется следующими основными параметрами: 1. Производительность – количество жидкости (газа), перемещаемое в единицу времени. Измеряется в объёмных (м3/с, также используются единицы м3/ч) или массовых (кг/с, также используется единицы т/ч) единицах. 2. Напор Н – приращение энергии единицы массы жидкости в гидравлическом механизме (разность удельных энергий жидкости на выходе из механизма и на входе в него). Измеряется в Дж/кг, также используется единица – метр столба перекачиваемой жидкости. Энергия, отнесённая к единице объёма, даёт давление жидкости Р, Па. Напор и давление связаны зависимостью Р = rН. Для понимания смысла выражения напора в метрах водяного столба можно привести следующее определение: напор H, [м] - это высота, на которую насос может поднять воду при подаче Q при отсутствии потерь в трубопроводе. 3. Полезная, или гидравлическая, мощность NП, Вт:
где G – массовая производительность, кг/с; Q – объёмная производительность, м3/с; H – напор, Дж/кг. 4. Коэффициент полезного действия (КПД) h, который определяется как отношение полезной мощности к мощности приводного двигателя N:
КПД можно выразить следующим образом:
где: hМ – механический КПД, учитывающий механические потери в гидравлическом механизме (потери, обусловленные трением в подшипниках, сальниках и т.д.); hО – объёмные потери (потери, обусловленные утечками жидкости через зазоры между неподвижными и вращающимися частями при наличии разности давлений); hГ – гидравлические потери (потери, обусловленные внутренним трением в жидкости, вихреобразованием и отрывом потока от поверхностей проточной части). 5. Допустимый кавитационный запас Нвак - минимальный напор, который должен обеспечиваться на входе в насос для предотвращения возникновения кавитации на лопастях рабочего колеса насоса. Кавитация - явление вскипания жидкости, когда давление в жидкости падает ниже давления насыщенных паров при данной температуре. Кавитация вызывает эрозионное разрушение лопаток рабочего колеса и может привести к срыву работы насоса. С этим же явлением связана также такая характеристика, как допустимая вакуумметрическая высота всасывания
Классификация насосов. Насосы по принципу действия делятся на 2 группы: 1. Объёмные (насосы вытеснения), в которых жидкости сообщается в основном потенциальная энергия давления. Энергообмен и перемещение жидкости в этих насосах обеспечиваются периодическим изменением объёма рабочих камер с помощью вытеснителей, совершающих возвратно-поступательное движение (поршневые насосы) или вращательное движение (роторные насосы – шестерённые, винтовые, пластинчатые или шиберные, роторно-поршневые). Рабочая камера попеременно сообщается с всасывающим и нагнетательным патрубком. Важным преимуществом объёмных насосов является свойство самовсасывания - при включении за счёт значительного разряжения на входе они сначала высасывают из трубопровода воздух, подтягивая к насосу воду и начиная её перекачку. Недостатком является значительное возрастание массы и габаритов с увеличением производительности: при одинаковой производительности масса поршневого насоса в несколько раз превышает массу центробежного. Ещё один существенный недостаток поршневых насосов - необходимость преобразования вращения вала электродвигателя в возвратно-поступательное движение поршня и пульсационный характер подачи жидкости. Недостатком шестерённых и винтовых насосов является сравнительно невысокий КПД, поэтому они применяются при малых значениях подачи, когда потери энергии не так существенны. Объёмные насосы как правило применяются для перекачивания вязких жидкостей - масла и топлива (в масляных и топливных системах энергетических установок, в системах гидравлики). Также поршневые и винтовые насосы используются в трюмных системах для перекачки загрязнённых нефтепродуктами льяльных вод. 2. Динамические насосы, в которых жидкости сообщается в основном кинетическая энергия. Рабочая камера в них постоянно сообщается и с всасывающим, и с нагнетательным патрубком. Динамические насосы в свою очередь подразделяют на лопастные и струйные. Лопастные насосы делят на центробежные, осевые, вихревые и комбинированные. Их принцип действия основан на силовом взаимодействии лопастей рабочего колеса насоса с потоком жидкости. Наибольшее распространение получили центробежные насосы, обладающие оптимальными массогабаритными характеристиками в широком диапазоне подачи. В центробежных насосах жидкость получает приращение кинетической энергии, перемещаясь от центра вращающегося рабочего колеса к периферии под действием центробежной силы. Наиболее существенный недостаток лопастных насосов - отсутствие свойства самовсасывания. Поэтому насосы либо должны работать с подпором (например, пожарные насосы, располагающиеся в трюме ниже уровня ватерлинии), либо оборудоваться дополнительными устройствами, обеспечивающими самовсасывание. Пример - изображённый на рисунке 1.3.3.1 насос типа НЦВС, широко применяемый в трюмно-балластных системах.
Рис. 1.3.3.1. Насос центробежный вертикальный самовсасывающий (НЦВС)
Для обеспечения самовсасывания центробежного насоса он снабжён водокольцевым вакуумным насосом 1, вращающимся на одной оси с рабочим колесом центробежного насоса 2 от электродвигателя 3; поплавковый клапан 4 отключает вакуумный насос от входного патрубка 5 в тот момент, когда воздух из трубопровода выкачан, и вода начинает поступать на крыльчатку насоса. Цифрой 6 обозначен нагнетательный патрубок центробежного насоса. В вихревых насосах поток жидкости движется в кольцевом канале по касательной к рабочему колесу с образованием множественных вихрей - различные порции жидкости постоянно попадает в ячейки рабочего колеса и выбрасывается обратно в кольцевой канал, таким образом жидкость получает многократное приращение энергии. Преимуществом вихревых насосов является более высокий напор (по сравнению с центробежными) и свойство самовсасывания, недостатком - довольно низкий КПД и значительное возрастание массы и габаритов с увеличением подачи, что ограничивает их применение небольшими значениями подачи (как правило не более 10 м3/ч). В струйных насосах приращение удельной энергии перекачиваемой жидкости осуществляется в процессе энергообмена с другой жидкостью, обладающей большей энергией. К струйным насосам относятся эжекторы (применяются для откачивания жидкости) и инжекторы (применяются для подачи жидкости). Важное преимущество струйных насосов - простота конструкции, отсутствие механического привода и движущихся частей. Схема эжектора изображена на рисунке 1.3.3.2.
Рис. 1.3.3.2. Водоструйный эжектор
Принцип действия эжектора следующий: рабочая (напорная) жидкость, выходя из сужающегося сопла 2 с большой скоростью, создаёт в смесительной камере 3 разрежение, засчёт которого туда по патрубку 1 подсасывается (эжектируется) перекачиваемая жидкость. В камере смешения перекачиваемая жидкость смешивается с потоком рабочей жидкости и увлекается им в цилиндрическое горло 4 и диффузор 5, в котором скорость падает, а давление повышается. Затем жидкость поступает в нагнетательный патрубок 6. Эжекторы применяются в осушительных системах для автономного осушения помещений форпика и цепных ящиков. В качестве рабочей жидкости используется вода от системы водяного пожаротушения.
Особенность судовых насосов - требование сохранения работоспособности при затоплении отсека, в котором находится насос. Поэтому судовые насосы имеют защищенное от воды исполнение электродвигателей и подвода к ним энергии. Соответственно, такие насосы должны иметь сертификат одобрения Регистром и могут изготавливаться только на предприятиях, допущенных к этому Регистром. При использовании насосов зарубежных производителей в каждом отдельном случае требуется дополнительно разрешение Регистра.
Классификация нагнетателей газообразных сред: 1. Вентиляторы – служат для перекачивания газообразных сред, имеют производительность до 40000 м3/ч и могут создавать напоры до 0, 0085 МПа. У вентиляторов степень повышения давления (отношение давления на выходе к давлению на входе) π < 1, 15. Для получения бОльших давлений применяются воздуходувки и компрессоры. По принципу действия вентиляторы делятся на центробежные и осевые. В осевых вентиляторах рабочее колесо перемещает газ вдоль своей оси, они применяются при малых давлениях и больших подачах. В центробежных вентиляторах газ движется радиально от центра рабочего колеса к периферии. Благодаря использованию работы центробежных сил такие вентиляторы позволяют получить большее давление, чем осевые. Центробежные вентиляторы получили наиболее широкое распространение в судовых системах. 2. Воздуходувки – служат для нагнетания газа с давлением от 0, 015 до 0, 3 МПа. Воздуходувки по принципу действия подразделяются, так же как и насосы, на две группы – объёмные (воздуходувки Рутса, Лисхольма, пластинчато-роторные) и динамические (турбовоздуходувки, вихревые воздуходувки). 3. Компрессоры – служат для создания высокого давления газов в ограниченном объёме, обеспечивают сжатие газа до давлений более 0, 3 МПа. Так как сжатие газа до высоких давлений приводит к существенному увеличению его температуры, часто приходится использовать искусственное охлаждение полостей сжатия компрессоров. Компрессоры по принципу действия подразделяются, так же как и насосы, на две группы – объёмные (поршневые, винтовые, спиральные и другие) и динамические (центробежные и осевые). Мембранные уровнемеры. Применяются для измерения уровня в балластных цистернах, грузовых танках и т.д. Принцип действия этих датчиков основан на свойстве жидкости оказывать гидростатическое давление на дно цистерны. Это давление определяется основным уравнением гидростатики:
где h – уровень жидкости в цистерне, м; r - плотность жидкости, кг/м3; Р0 – давление на поверхности жидкости, Па. Тогда уровень равен:
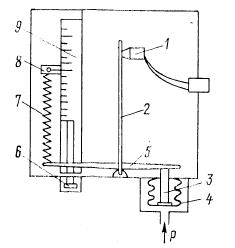
Таким образом, необходимо измерить перепад давлений у дна цистерны и на поверхности. Для измерения этой разности применяется дифференциальный манометр. Схема дифференциального манометра с дистанционной передачей сигнала представлена на рисунке.
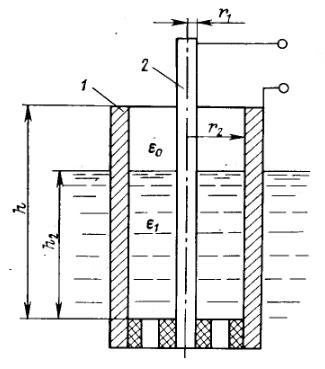
Чувствительный элемент состоит из перегородки 2, в которую ввёрнуты две гофрированные мембранные коробки 1 и 3, внутренние полости которых между собой каналом и заполнены дистиллированной водой. К центру верхней мембраны закреплён ферромагнитный сердечник 6 дифференциального трансформатора с первичной 4 и вторичной 5 обмотками. Сердечник находится внутри разделительной трубки 5. В нижнюю и верхнюю камеры корпуса 8 подводятся давления Р1 (у дна цистерны) и Р2 (на поверхности). Под действием разности давлений в камерах (Р1 > Р2) нижняя коробка 1 сжимается, вода из неё перетекает в верхнюю коробку 3, вызывая перемещение сердечника дифференциального трансформатора, что в свою очередь вызывает изменение ЭДС вторичной обмотки. Емкостные уровнемеры. Принцип действия этих уровнемеров основан на использовании ёмкостных преобразователей с переменным диэлектриком. Схема датчика такого уровнемера в виде цилиндрического конденсатора представлена на рисунке.
Конденсатор образован двумя концентрическими электродами – трубой 1 и стержнем 2. Датчик помещён в контролируемую среду с уровнем h2. Ёмкость датчика может быть определена как ёмкость двух параллельно соединённых конденсаторов, один из которых образован электродами длиной h2 (с диэлектриком – контролируемой жидкостью, диэлектрической проницаемостью e1), второй – электродами длиной h – h2 (с диэлектриком – воздухом, диэлектрической проницаемостью e0). Ёмкость датчика изменяется пропорционально уровню h2:
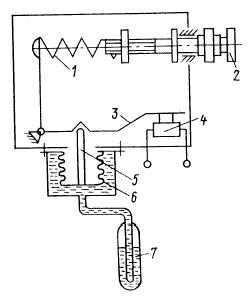
где Недостатком данного способа измерения является то, что диэлектрические свойства жидкостей изменяются в зависимости от температуры и состава. Ёмкостные уровнемеры можно применять и для измерения уровня электропроводных жидкостей – в этом случае один из электродов покрывается тонким слоем изоляционного материала. Ультразвуковые уровнемеры. Принцип действия этих приборов основан на отражении ультразвуковых волн от поверхности раздела сред. Схема такого уровнемера представлена на рисунке.
В нижней части цистерны размещены излучатель 6 и приёмник 7 ультразвуковых колебаний. Излучатель через определённые промежутки времени посылает импульсы ультразвуковых колебаний, которые распространяются со скоростью с. Достигнув поверхности раздела на высоте h, часть энергии ультразвуковых колебаний отражается и с той же скоростью распространяется к приёмнику. Время от момента излучения до попадания на приёмник:
Приборы контроля давления. Датчики давления обычно состоят из двух измерительных преобразователей. Первый служит для преобразования давления в механический параметр (например, перемещение) с помощью упругих чувствительных элементов (мембран, мембранных коробок, сильфонов), второй – для преобразования механического параметра в электрический (сопротивление, ёмкость, индуктивность). Более подробно – см. курс ТТИ. Датчик давления с потенциометрическим преобразователем. Схема датчика представлена на рисунке.
Чувствительным элементом является мембранная коробка 1, которая деформируется под действием измеряемого давления Р. Эта деформация приводит к перемещению штока 2 и связанного с ним движка потенциометрического преобразователя 3. Соответственно, изменяется электрическое сопротивление и значение выходного сигнала цепи. Реле давления типа РДК. Схема данного реле, применяемого как сигнализатор давления, показана на рисунке.
Принцип действия реле основан на уравновешивании силы давления Р, действующей на сильфон 4, силами упругости пружины 7 и сильфона. При повышении давления дно сильфона со штоком 3 и правым концом рычага 5 движется вверх, а левый конец рычага – вниз, растягивая пружину 7. Рычаг 2 идёт влево, размыкая кнопкой микровыключателя 1 электрическую цепь. Винт 6 с движущейся по нему кареткой 8 служит для настройки реле на требуемое давление. При этом величина установленного предельного давления отображается на шкале 9.
Приборы контроля температуры. Для контроля температуры рабочих сред применяют датчики с механическими и электрическими чувствительными элементами. Более подробно – см. курс ТТИ (жидкостные, биметаллические, дилатометрические, манометрические, термоэлектрические, датчики сопротивления). Термореле типа ТРК. Схема данного реле, применяемого в системах кондиционирования воздуха, приведена на рисунке.
Реле предназначено для размыкания цепи при достижении заданной температуры воздуха. Его действие основано на изменении давления легкоиспаряющейся жидкости в термобаллоне 7 при изменении температуры окружающего воздуха. При повышении температуры эта жидкость закипает, давление в термобаллоне увеличивается и через капиллярную трубку воздействует на сильфон 6. Сильфон сжимается, и шток 5 движется вверх, поворачивая рычаг 3, который в свою очередь размыкает контакты переключателя 4. Заданная температура срабатывания реле устанавливается с помощью пружины 1, натяжение которой регулируется винтом 2.
Раздел 1. Основы проектирования и расчёта общесудовых систем
Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 936; Нарушение авторского права страницы



 , (1.1.1)
, (1.1.1) (1.1.2)
(1.1.2) (1.1.3)
(1.1.3)
 ,
,  .
. ,
,  . Именно эта высота наглядно показывается мановакуумметром на всасывающем трубопроводе.
. Именно эта высота наглядно показывается мановакуумметром на всасывающем трубопроводе.

 ,
, 

 ,
,  . r1 и r2 – радиусы стержня и трубы.
. r1 и r2 – радиусы стержня и трубы.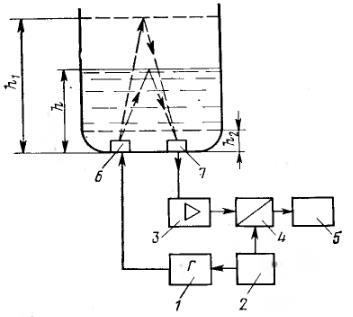
 , где k – поправочный коэффициент. Таким образом, промежуток времени между излучением и приёмом при постоянной скорости распространения однозначно характеризует уровень жидкости. Излучателем и приёмником ультразвуковых колебаний служат пьезоэлектрические преобразователи. Генератор 1 вырабатывает высокочастотные электрические колебания, которые подаются на излучатель 6. Приёмник 7 производит обратное преобразование ультразвуковых колебаний в электрические. Этот электрический сигнал усиливается в усилителе 3 до значений, достаточных для обработки в измерителе времени 4. Синхронизирующее устройство 2 обеспечивает одновременный с излучением пуск измерителя времени. Измеритель времени вырабатывает сигнал, пропорциональный промежутку времени t, и подаёт его на показывающий прибор 5, проградуированный в единицах уровня.
, где k – поправочный коэффициент. Таким образом, промежуток времени между излучением и приёмом при постоянной скорости распространения однозначно характеризует уровень жидкости. Излучателем и приёмником ультразвуковых колебаний служат пьезоэлектрические преобразователи. Генератор 1 вырабатывает высокочастотные электрические колебания, которые подаются на излучатель 6. Приёмник 7 производит обратное преобразование ультразвуковых колебаний в электрические. Этот электрический сигнал усиливается в усилителе 3 до значений, достаточных для обработки в измерителе времени 4. Синхронизирующее устройство 2 обеспечивает одновременный с излучением пуск измерителя времени. Измеритель времени вырабатывает сигнал, пропорциональный промежутку времени t, и подаёт его на показывающий прибор 5, проградуированный в единицах уровня.