
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнение динамики замкнутой системы
Система автоматического регулирования состоит из ряда звеньев, динамика которых в общем случае описывается дифференциальными уравнениями. Так как элементы САР находятся во взаимодействии друг с другом, а сама система является замкнутой, то математическим описанием САР будет являться система дифференциальных уравнений динамики звеньев, входящих в систему и их связей. Путем исключения промежуточных координат систему дифференциальных уравнений можно привести к одному дифференциальному уравнению, которое включает в себя только входные воздействия и выходную, регулируемую величину. В качестве примера рассмотрим систему автоматического регулирования частоты вращения вала теплового двигателя, принципиальная схема которой приведена на рис. 39. Структурная схема этой САР изображена на рис. 40. Динамику звеньев, входящих в состав системы, запишем в операторной форме:
объект — чувствительный элемент — сервопривод —
где у — регулируемая величина; x2 — положение топливорегулирующего органа.
Рис. 39. Схемы САР частоты вращения вала дизель-генератора: а — принципиальная; б — функциональная: 1 — золотник; 2 — поршень сервомотора; 3 — рычаг; 4 — грузы; 5 — муфта; 6 — вал регулятора; СУ — корректирующее устройство; ЧЭ — чувствительный элемент; ЗУ — задающее устройство; УС — устройство сравнения; УУ — усилительное устройство; ИМ — исполнительный механизм; f(t) — возмущающее воздействие; g(t) — управляющее воздействие
Решая систему (70), получим уравнение динамики замкнутой системы в операторной форме:
Для этой же САР составим дифференциальное уравнение по передаточным функциям звеньев.
Рис. 40. Структурная схема САР частоты вращения вала дизель-генератора
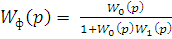
Для случая, когда возмущение приложено к объекту, передаточная функция замкнутой САР будет иметь выражение
где (для нашего случая)
Тогда
Отсюда уравнение динамики замкнутой системы
аналогично уравнению (71).
Вопросы для самоконтроля:
Литература [2, 5, 6].
ГЛАВА 3 УСТОЙЧИВОСТЬ И КАЧЕСТВО СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ Определение устойчивости Основным назначением САР является поддержание регулируемой величины на заданном уровне при наличии воздействия на систему внешних возмущений. Поэтому систему автоматического регулирования называют устойчивой, если, будучи выведенной из состояния равновесия и предоставленной самой себе, она с течением времени будет стремиться вернуться к равновесному состоянию. Устойчивость системы определяется характером свободного движения, которое, как известно, описывается однородным дифференциальным уравнением (без правой части). Поэтому форма правой части уравнения, описывающего динамику системы, не оказывает влияния на устойчивость. В общем случае свободное движение системы можно описать однородным дифференциальным уравнением вида:
где у — регулируемая величина; а0, а1... ап — постоянные коэффициенты, определяемые параметрами системы.
Согласно определению система будет устойчивой, если
Решение уравнения (72) можно представить в следующем виде:
где Сi — постоянные интегрирования, определяемые из начальных условий, pi — корни характеристического уравнения (75), соответствующего дифференциальному уравнению (72):
Условие (73) может быть выполнено в том случае, если все составляющие решения (74) с течением времени будут стремиться к нулю. Так как все коэффициенты Сi — величины постоянные, то характер каждой составляющей Если pi будет положительной вещественной величиной, то
переходный процесс колебательный, амплитуда А которого будет возрастать или убывать в зависимости от знака вещественной части комплексного корня. При этом, если вещественная часть комплексного корня будет положительной величиной, то переходный процесс будет колебательным с нарастающим значением амплитуды колебаний, т. е. будет расходящимся; если же вещественная часть комплексно-сопряженного корня будет отрицательной величиной, амплитуда колебаний с течением времени будет стремиться к нулю. Так как вещественные корни представляют собой частный случай комплексных (при β =0), то на основании приведенных соображений вытекает следующее условие устойчивости линейных систем. Для того чтобы линейная САР была устойчива, необходимо и достаточно, чтобы вещественные части всех корней характеристического уравнения САР были отрицательными.
Рис. 41. Распределение корней характеристического уравнения на комплексной плоскости: а — устойчивая система; б — неустойчивая система
Если корни характеристического уравнения расположить на комплексной плоскости, то для устойчивости системы необходимо и достаточно, чтобы все корни лежали слева от мнимой оси. Если пара комплексных корней лежит на мнимой оси, а остальные — слева от нее, то система находится на границе устойчивости. На рис. 41 показано распределение корней характеристического уравнения 5-го порядка. Таким образом, исследование устойчивости сводится к определению знаков вещественной части корней характеристического уравнения. Популярное:
|
Последнее изменение этой страницы: 2016-07-13; Просмотров: 1046; Нарушение авторского права страницы
 ;
;  ; (70)
; (70) ,
, 

 . (71)
. (71)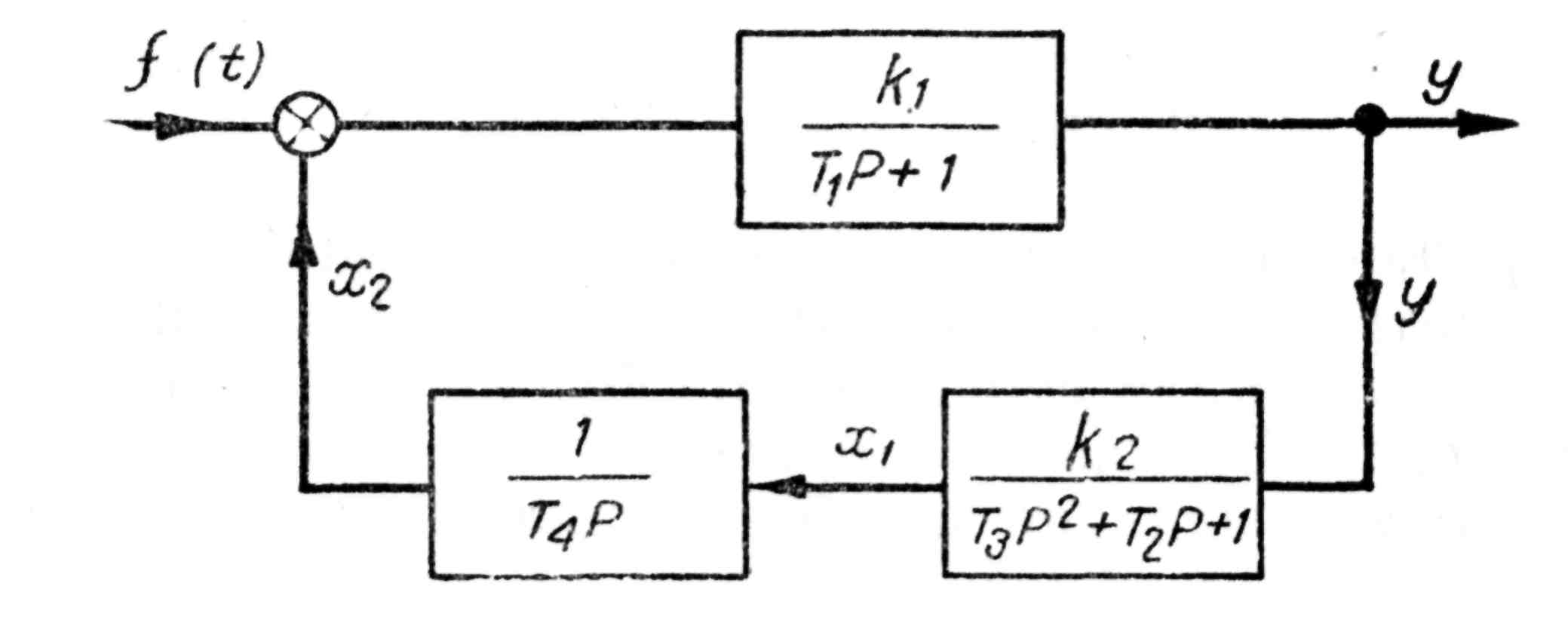
 ,
,  — передаточная функция объекта регулирования;
— передаточная функция объекта регулирования;  — передаточная функция регулятора.
— передаточная функция регулятора.
 .
. , (72)
, (72)
 (73)
(73) , (74)
, (74) . (75)
. (75) зависит только от pi.
зависит только от pi. — комплексная величина, то
— комплексная величина, то —
—