
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механический принцип относительности.
В механике Ньютона все законы выполняются в инерциальных системах отсчета. Пусть имеем две инерциальные системы отсчета, одну из которых мы будем условно считать неподвижной (система К с осями декартовых координат х, у, z). Другая же система (система К’ с осями декартовых координат х’, у’, z’) пусть равномерно и прямолинейно движется со скоростью Примем для простоты, что оси х и х’ совпадают, а скорость относительного движения Так как предполагается, что в момент времени, равный t=0, начало координат обеих систем совпадали, то за время t система К’ переместится на расстояние, равное
Соотношения (1)-(4) называются преобразованиями Галилея Преобразования Галилея связывают координаты и время события в указанных двух инерциальных системах отсчета. В векторной форме:
Дифференцируя формулы (2)-(4) по времени, получим классический закон сложения скоростей:
Здесь Продифференцируем его по времени и учтем, что
В классической механике считается, что масса тела не зависит от системы отсчета, то есть
Таким образом, закон Ньютона не изменяется при переходе от системы К в систему К’. На этом основании можно сформулировать механический принцип относительности Галилея: во всех инерциальных системах отсчета одни и те же механические явления протекают одинаковым образом, и никакими механическими опытами, проводимыми внутри данной инерциальной системы отсчета, невозможно установить, покоится система отсчета или движется равномерно и прямолинейно. Физические величины и физические законы, не изменяющиеся при переходе от одной инерциальной системы отсчета к другой, называют инвариантными (не изменяющимися) по отношению к преобразованиям Галилея.
Работа и мощность. Элементарной работой силы `F, приложенной в точке М, называется скалярная величина
где a – угол между направлениями элементарного перемещения Так как |
где F
Если угол dA=Fds. Если угол Если угол Знак работы имеет следующий смысл: работаположительна, когда составляющая Работа силы на любом конечном перемещении M0M1 вычисляется как криволинейный интеграл
Следовательно, работа силы на любом перемещении M0 М1 равна взятому вдольэтого перемещения криволинейному интегралу от элементарнойработы. Если величина F В частности, такой случай может иметь место, когда действующая сила постоянна по модулю и направлению (`F=const), а точка, к которой приложена сила, движется прямолинейно (рис.7). В этом случае F Единицей измерения работы в СИ является 1 джоуль (1 Дж=1Н м=1кг м2/с2). 1 Дж – работа, совершаемая силой 1 Н на пути 1 м. Консервативная сила – сила, работа которой определяется только начальным и конечным положениями тела и не зависят от формы пути. Примеры консервативных сил – силы тяготения, силы упругости. Примером неконсервативных (диссипативных) сил являются силы трения. При сравнении различных механизмов, совершающих работу, имеет смысл говорить не только о величине работы, но и величине времени, в течение которого работа совершается (то есть о скорости выполнения работы). Мощностью называется физическая величина, равная работе, совершаемой в единицу времени. Если работа совершается равномерно, то средняя мощность N=A/t1 где t1— время, в течение которого произведена работа А. В общем случае N=dA/dt = F Следовательно, мощность равна произведению касательной составляющей силы на скорость. Единицей измерения мощности в СИ служит 1 ватт (1 Вт=1Дж/с=1Нм/с). Механическая энергия.
Говорят, что тело обладает энергией, если оно способно совершить некоторую работу. Различают два вида механической энергии: потенциальную и кинетическую. Очевидно, что всякое движущееся тело может производить работу. Поэтому оно обладает энергией, которую называют кинетической. Кинетическая энергия это энергия, зависящая от скорости движения тела.
Пусть в начальной точке пути скорость равна v1, а в конечной точке v2. Рассмотрим уравнение второго закона Ньютона
Умножим на
где
После интегрирования получим работу А12:
Отсюда вытекает формула, определяющая кинетическую энергию тела:
Тело, поднятое над землей, или сжатая пружина также способны совершить работу. То есть они обладают энергией, хотя и покоятся. Такую энергию называют потенциальной. Потенциальной называется энергия, зависящая от взаимного расположения тел или взаимодействия частей одного и того же тела. Пусть в пространстве существует некоторое стационарное силовое поле, например, поле тяготения, создаваемое некоторым телом, которое будем считать точечным. Примем, что тело является заодно и телом отсчета. Если в некоторую точку М поля поместить другое тело (материальную точку), то оно испытывает силу, зависящую только от расстояния r до источника, то есть Работа, совершаемая в стационарном силовом поле при перемещении тела из некоторой точки М1 в точку М2 равна:
В общем случае работа зависит от формы и длины пути от М1 до М2. Мы будем иметь дело только с потенциальным полем (в котором работа по перемещению не зависит ни от формы, ни от длины пути от М1 до М2, а зависит только от координат этих точек). В этом случае говорят о потенциальных (или консервативных силах). Следовательно, работа в потенциальном поле, совершаемая по замкнутому пути, равна нулю. Данное свойство потенциальных полей математически означает следующее. Подынтегральное выражение в (5.2) равно взятому со знаком минус полному дифференциалу функции Таким образом, потенциальная энергия – это физическая величина, элементарное изменение которой равно (взятой со знаком минус) элементарной работе, совершаемой силами поля. Интегрируя последнее соотношение от М1 до М2, получим:
Отсюда вытекает, что физический смысл имеет лишь разность потенциальных энергий. Условимся считать, что когда тело находится на бесконечности ( Приравнивая правые части в соотношениях (5.1) и (5.3), получаем
Или окончательно
Назовем полной механической энергией величину: Тогда из (5.4) следует важный вывод. Полная механическая энергия тела при его перемещении вдоль любой траектории в потенциальном поле остается постоянной. Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 851; Нарушение авторского права страницы
 относительно первой (см. рис.8.1.).
относительно первой (см. рис.8.1.). направлена вдоль оси х или х’. Пусть по часам наблюдателя в системе К прошло некоторое время t. В классической физике аксиоматически принимается, что такое же время зарегистрирует и наблюдатель в системе К’, т.е.
направлена вдоль оси х или х’. Пусть по часам наблюдателя в системе К прошло некоторое время t. В классической физике аксиоматически принимается, что такое же время зарегистрирует и наблюдатель в системе К’, т.е.  . (1)
. (1) (2)
(2) (3)
(3)  (4)
(4) .
. ;
;  ;
;  .
. – проекции вектора относительной скорости тела
– проекции вектора относительной скорости тела  (по отношению к системе отсчета К’), а
(по отношению к системе отсчета К’), а  – проекции вектора абсолютной скорости
– проекции вектора абсолютной скорости 
 . Получим:
. Получим:  (5)
(5) . Умножим обе части равенства (5) на m:
. Умножим обе части равенства (5) на m:  или
или 
 ,
,  и силы
и силы  . Следовательно, элементарная работа силы равна скалярному произведению силы на вектор элементарного перемещения точки ее приложения.
. Следовательно, элементарная работа силы равна скалярному произведению силы на вектор элементарного перемещения точки ее приложения. ,
,  — проекция силы
— проекция силы  на касательную М
на касательную М 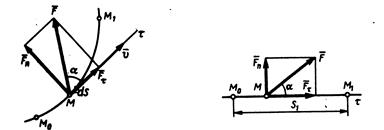
 острый, то работа положительна. В частности, если направление силы совпадает с направлением перемещения (
острый, то работа положительна. В частности, если направление силы совпадает с направлением перемещения (  .
. .
. .
. .
. .
. :
: 
 ,
,  ,
,  – элементарная работа на участке dr. Так векторы
– элементарная работа на участке dr. Так векторы  сонаправлены, то
сонаправлены, то  . Тогда:
. Тогда:  .
. =
=  . (5.1)
. (5.1) , где С – произвольная постоянная. В классической механике полагают С=0. Таким образом
, где С – произвольная постоянная. В классической механике полагают С=0. Таким образом .
. .
. . (5.2)
. (5.2) , которая называется потенциальной энергией системы:
, которая называется потенциальной энергией системы:  .
. . (5.3)
. (5.3) ), то его потенциальная энергия равна нулю. Тогда под потенциальной энергией
), то его потенциальная энергия равна нулю. Тогда под потенциальной энергией  =
=  .
. . (5.4)
. (5.4) .
.