|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
Классификация по назначению. Электрические машины по назначению подразделяют на следующие виды: электромашинные генераторы*, преобразующие механическую энергию в электрическую. Их устанавливают на электрических станциях и различных транспортных установках: автомобилях, самолетах, тепловозах, кораблях, передвижных электростанциях и др. На электростанциях они приводятся во вращение с помощью мощных паровых и гидравлических турбин, а на транспортных установках - от двигателей внутреннего сгорания и газовых турбин. В ряде случаев генераторы используют в качестве источников питания в установках связи, устройствах автоматики, измерительной техники и пр.; электрические двигатели, преобразующие электрическую энергию в механическую; они приводят во вращение различные машины, механизмы и устройства, применяемые в промышленности, сельском хозяйстве, связи, на транспорте, в военном деле и быту. В современных системах автоматического управления их используют в качестве исполнительных, регулирующих и программирующих органов; электромашинные преобразователи, преобразующие переменный ток в постоянный и, наоборот, изменяющие величину напряжения переменного и постоянного тока, частоту, число фаз и др. Их широко используют в промышленности, на транспорте и в военном деле, хотя в последнее десятилетие роль электромашинных преобразователей существенно уменьшилась вследствие применения статических полупроводниковых преобразователей; Классификация по роду тока и принципу действия. Электрические машины по роду тока делят на машины переменного и постоянного тока. Машины переменного тока в зависимости от принципа действия и особенностей электромагнитной системы подразделяют на трансформаторы, асинхронные, синхронные и коллекторные машины. Трансформаторы широко применяют для преобразования напряжения: в системах передачи и распределения электрической энергии, в выпрямительных установках, устройствах связи, автоматики и вычислительной техники, а также при электрических измерениях (измерительные трансформаторы) и функциональных преобразованиях (вращающиеся трансформаторы). Асинхронные машины используют главным образом в качестве электрических двигателей трехфазного тока. Простота устройства и высокая надежность позволяют применять их в различных отраслях техники для привода станков, грузоподъемных и землеройных машин, компрессоров, вентиляторов и пр. В системах автоматического регулирования широко используют одно- и двухфазные управляемые асинхронные двигатели, асинхронные тахогенераторы, а также сельсины. Синхронные машины применяют в качестве генераторов переменного тока промышленной частоты на электрических станциях и генераторов повышенной частоты в автономных источниках питания (на кораблях, самолетах и т. п.). В электрических приводах большой мощности применяют также синхронные электродвигатели. В устройствах автоматики широко используют различные синхронные машины малой мощности (реактивные, с постоянными магнитами, гистерезисные, шаговые, индукторные и пр.). Машины постоянного тока применяют в качестве генераторов и электродвигателей в устройствах электропривода, требующих регулирования частоты вращения в широких пределах: железнодорожный и морской транспорт, прокатные станы, электротрансмиссии большегрузных автомобилей, грузоподъемные и землеройные машины, сложные металлообрабатывающие станки и пр., а также в тех случаях, когда источниками электрической энергии для питания электродвигателей служат аккумуляторные батареи (стартерные двигатели, двигатели подводных лодок, космических кораблей и т. п.). Генераторы постоянного тока часто применяют для питания устройств связи, зарядки аккумуляторных батарей, в качестве основных источников питания на транспортных установках (автомобилях, самолетах, тепловозах, пассажирских вагонах). Однако в последнее время генераторы постоянного тока заменяются генераторами переменного тока, работающими совместно с полупроводниковыми выпрямителями.
№16 конструктивное исполнение По степени защиты: · Открытое исполнение (соответствует степени защиты IP00), · Защищенное ( IP21, IP22), · Брызгозащищенное и каплезащищенное (IP23, IP24), · Водозащищенное (IP55, IP56), · Пылезащищенное (IP65, IP66), · Закрытое (IP44, IP54), · Герметичное (IP67, IP68). 6. По группе эксплуатации Каждая электрическая машина относится к какой-либо группе эксплуатации, обозначаемая М1 - М31. Указанная группа характеризует приспособленность машины к вибрации с определенной частотой, к ускорениям и ударам. В основном, машины общего назначения относятся к группе М1, предусматривающей размещение на стенах или фундаментах при отсутствии ударных нагрузок. 7. По продолжительности и особенности работы машины. Продолжительность и особенности работы машины характеризуется режимом работы, который указывается в паспорте и обозначается буквой S и цифрой от 1 до 8. Описание режимов работы приводится в нормативных документах. См. здесь: Режимы работы электродвигателей. Например, S1 – продолжительный режим, при котором машина успевает нагреться до установленной температуры. Режим работы имеет значение при выборе электродвигателей для привода различных механизмов. На рисунке ниже представлена основная классифкация электрических машин по роду тока, принципу действия и типу возбуждения.
Классификация электрических машин 8. По способу монтажа. Исполнение электрической машины по способу монтажа обозначается буквами IМ и четырьмя цифрами, например, IМ1001, IМ3001 и др. Первая цифра характеризует конструктивное исполнение машины (на лапах – для установки на горизонтальной поверхности, электрические машины с фланцем – для крепления к вертикальной поверхности и т.д.). Далее двумя цифрами обозначается способ монтажа и направление конца вала машины, а последняя цифра указывает на исполнение конца вала (цилиндрический, конический и пр.) Основные показатели и характеристики электрической машины, на которые она рассчитана, называются номинальными и указываются на паспортной табличке, прикрепленной к корпусу машины.
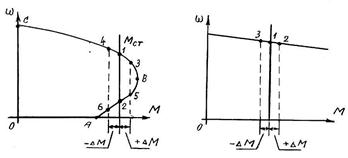
№17 устойчивая работа эл привода с ад Электропривод представляет собой электромеханическую систему, которая должна работать устойчиво. Примером устойчивой системы является детская игрушка «Ванька-встанька». Если «Ваньку» наклонить, а затем убрать руку, игрушка качнется несколько раз в разные стороны, а затем замрет, вернувшись в прежнее положение. Точно так же работают устойчивые системы. Рассмотрим устойчивость электропривода. В общем случае под устойчивостью системы ( в данном случае – электропривода ) понимают ее способность вернуться к прежнему или близкому к прежнему состоянию по- сле кратковременногодействия на нее внешнего возмущающего воздействия ( рис. 2.9 ).
. а ) б ) Рис. 2.9. Механические характеристики асинхронного двигателя ( а ) и двигателя параллельного возбуждения ( б ) В данном случае, под внешним возмущающим воздействием будем понимать изме- нение исходного статического момента М на величину + Δ М или - Δ М. Рассмотрим устойчивость работы привода в двух случаях: 1. в исходном состоянии двигатель работает в точке 1 на участке ВС своей механи- ческой характеристики; 2. в исходном состоянии двигатель работает в точке 2 на участке АВ. Для упрощения объяснения механическую характеристику механизма изобразим в виде вертикальной прямой М. В первом случае асинхронный двигатель работает в точке 1 в установившемся режиме.Для этой точки справедливо равенство моментов двигателя М = М.Если кратковременно увеличить статический момент на величину + Δ М, до значения М' = М + Δ М, двигатель за счет саморегулирования перейдет из точки 1 в точку 3.В этой точке наступит установившийся режим, т.к. момент двигателя увеличился до значения, равного возросшему моменту механизма. Если скачкообразно убрать внешнее воздействие, т.е. статический момент механизма уменьшить до прежнего значения М, то электромагнитный момент двигателя в первый момент времени не изменится. Последнее объясняется тем, что из-за инерции якоря его скорость не может измениться мгновенно, т.е. в первый момент останется такой, как в точке 3. Поэтому ( см. логическую цепочку выше ) противоэлектродвижущая сила обмотки якоря, а значит, ток якоря и электромагнитный момент двигателя останутся прежними, как в точке 3.Значит, электромагнитный момент двигателя в точке 3 окажется больше статического момента механизма ( точка 1 ), поэтому двигатель станет разгоняться по участку 3 -1 своей механической характеристики, возвращаясь из точки 3 в точку 1.На этом участке скорость двигателя увеличивается, а момент уменьшается. Как только двигатель, уменьшая свой момент, вернется в точку 1, переходный процесс закончится, т.к. в этой точке вновь наступит равновесие двух моментов – двигателя и механизма ( М = М). Наоборот, при уменьшении исходного статического момента на величину - Δ М электродвигатель автоматически, за счет саморегулирования, также уменьшит свой электромагнитный момент и перейдет из точки 1 в точку 4.В этой точке наступит равновесие моментов двигателя и механизма ( М' = М' ).Если скачкообразно убрать внешнее воздействие, т.е. статический момент механизма увеличить до прежнего значения М, то электромагнитный момент двигателя в первый момент времени не изменится из-за инерции якоря ( см. саморегулирование ).В результате этот момент ( точка 4 ) станет меньше тормозного статического ( точка 1 ), и двигатель станет тормозиться по участку 4 – 1 своей механической характеристики. На этом участке момент двигателя увеличивается, и в точке 1 вновь наступит установившийся режим. Таким образом, в любой точке отрезка ВС механической характеристики двигателя последний работает устойчиво. Во втором случае асинхронный двигатель работает в точке 2 в установившемся режиме. Для этой точки справедливо равенство моментов двигателя М = М.Если кратковременно увеличить статический момент на величину + Δ М, до значения М' = М + Δ М, двигатель за счет саморегулирования перейдет из точки 1 в точку 5. В этой точке наступит установившийся режим, т.к. момент двигателя увеличился до значения, равного возросшему моменту механизма. Если скачкообразно убрать внешнее воздействие, т.е. статический момент механизма уменьшить до прежнего значения М, то электромагнитный момент двигателя М в первый момент времени не изменится, и он окажется больше тормозного статического. Поэтому в последующие моменты времени двигатель станет разгоняться по участку 5- В -1 и в точке 1 вновь наступит равновесие моментов двигателя и механизма. Таким образом, в рассмотренном случае двигатель не вернулся в точку 2 исходного режима, а перешел работать в точку 1 с повышенной против точки 2 скоростью. Если же, начиная с точки 2, кратковременно уменьшить статический момент М на величину - Δ М, двигатель перейдет за счет саморегулирования из точки 2 в точку 6, в которой наступит установившийся режим. Если скачкообразно убрать внешнее воздействие, т.е. статический момент механизма увеличить до прежнего значения М, то электромагнитный момент двигателя М в первый момент времени не изменится, и он окажется меньше тормозного статического. Поэтому в последующие моменты времени двигатель станет тормозиться по участку 6 – А, и в точке А остановится и перейдет в режим стоянки под током. Таким образом, и в этом случае двигатель не вернулся в точку 2 исходного режима а перешел в точку А с пониженной против точки 2 скоростью, равной нулю. Таким образом, в любой точке отрезка АВ механической характеристики двигателя последний работает неустойчиво. Получим условие устойчивости асинхронного двигателя. На участке ВС ( устойчивая работа ) жесткость механической характеристики β = < 0, т.е. при увеличении момента М ( Δ М > 0 ), например, при переходе из точки 1 в точку 3, скорость уменьшается ( Δ ω < 0 ), и наоборот. На участке АВ ( неустойчивая работа ) жесткость механической характеристики β = > 0, т.е. при увеличении момента М ( Δ М > 0 ), например, при переходе из точки 2 в точку 5 скорость также увеличивается ( Δ ω > 0 ), и наоборот. Таким образом, двигатель работает устойчиво на участке механической характеристики, где жесткость отрицательна ( β < 0 ) и неустойчиво на участке, где жесткость положительна ( β > 0 ).Более подробно устойчивость работы асинхронного двигателя рассматривается ниже ( см. §*** «Опрокидывание асинхронного двигателя» ). Сравним устойчивость асинхронного двигателя и двигателя постоянного тока с параллельным возбуждением ( рис. 2.9, б ).Рассуждая аналогично, можно показать, что при увеличении статического момента на величину + Δ М двигатель постоянного тока перейдет из исходной точки 1 в точку 2, в которой наступит установившийся режим. Если скачкообразно убрать внешнее воздействие, т.е. статический момент механизма уменьшить до прежнего значения М, то электромагнитный момент двигателя М в первый момент времени окажется больше статического. Поэтому в последующие моменты времени двигатель станет разгоняться по участку 2 – 1, и в точке 1 переходный процесс закончится. В этой точке вновь наступит установившийся режим. Наоборот, при уменьшении статического момента на величину – Δ М двигатель перейдет из исходной точки 1 в точку 3, в которой наступит установившийся режим. Если скачкообразно убрать внешнее воздействие, т.е. статический момент механизма увеличить до прежнего значения М, то электромагнитный момент двигателя М в первый момент времени не изменится, и он окажется меньше тормозного статического. Двигатель станет тормозиться по участку 3 – 1 своей механической характеристики. На этом участке момент двигателя увеличивается. В точке 1 вновь наступит установившийся режим. Таким образом, двигатель с параллельным возбуждением работает устойчиво в любой точке своей механической характеристики до момента остановки якоря. При остановке якоря двигатель перейдет в режим короткого замыкания ( режим стоянки под током ). Этому режиму соответствует точка пересечения механической характеристики электродвигателя с положительной полуосью оси моментов М.Если, начиная с этой точки, увеличить активный статический момент ( в элекроприводах ГПМ или ЯШУ увеличением веса груза или якоря с якорь-цепью, двигатель реверсирует и станет увеличивать свой электромагнитный момент до те пор, пока последний не сравняется с возросшим статическим моментом механизма. При наступлении равенства этих двух моментов вновь наступит установившийся режим тормозного спуска
№18 Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 1216; Нарушение авторского права страницы