
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Буквенно-цифровые обозначенияСтр 1 из 7Следующая ⇒
Буквенно-цифровые обозначения Правила выполнения эл схем Виды схем АД устройство и принцип работы Механическая и эл.мех. характеристики АД Трансформатор. Конструкция, принцип действия Назначение, устройство и правило выбора магнитных пускателей для АД Расчет сечения проводников Машина постоянного тока в режиме генератора Машина постоянного тока в режиме двигателя Назначение, устройство автоматических выключателей Электромагнитное реле Магнитный пускатель Реверсированное и электромеханические способы торможения АД Классификация эл. машин Основные конструктивные исполнения эл. машин Условия устойчивости работы электропривода с АД Опыт короткого замыкания трансформатора Механическая характеристика АД. Естественная и искусственная Способы регулирования частоты вращения АД Пуск двигателя постоянного тока Частота вращения двигателя постоянного тока Законы электромеханики Правило выбора электродвигателя 25. №1 Буквенно-цифровые обозначения элементов на электрических принципиальных схемах. Принципиальная схема выполняется для изделия находящегося в отключенном состоянии. Схемы рекомендуется выполнять строчным способом т.е. условно графические обозначения элементов группируются в вертикальные или горизонтальные цепи. Всем элементам присваивается позиционные буквенно-цифровые обозначения. Если схема выполняется строчным способом то справа от позиционного обозначения или под ним указывают обозначение зон или номера строк в которых расположена составная часть устройства. При выполнении схем разнесенным способом допускается указывать номер строк на которых размещаются замыкающие и размыкающие контактные реле и магнитные пускатели. Это оформляется в виде таблицы. По стандарту все участки цепей на принципиальных схемах должны быть обозначены. Обозначение участков называют маркировкой. Участки цепи разделенных любыми элементами кроме разъемом и контактных соединений должны иметь отличную маркировку.. Маркировку выполняют в направлении ввода источника питания. Силовые цепи переменного тока принято маркировать следующим образом: 1ф L1, L11, L12… A1, A2, A3… 2ф L2, L21, L22… B1, B2, B3… Цепи управления обозначают последовательностью арабских цифр или последовательностью цифр с буквой V, либо с использованием адреса участка присоединения. Обозначения проставляют около концов или в середине участка цепи. При вертикальном расположении с лева, при горизонтальном то сверху. Данные об элементах записывают в перечень элементов, который оформляется в соответствии с ГОСТ 2. 2004. №2 Правила выполнения электрических схем. Конструкторская документация – это комплекс графических и текстовых документов которые содержат информацию о составе изделия, принципе работы, необходимые данные для изготовления и эксплуатации изделия. ЕСКД – это совокупность стандартов устанавливающих правила оформления и разработки конструкторских документов. Схема – это конструкторский документ в котором составная часть изделия и связи между ними изображены условно без соблюдения масштаба с помощью условно-графических обозначений (УГО) УГО- устанавливается ЕСКД и допускается поворачивать на угол кратный 90. Если УГО содержит буквенно-цифровые обозначения (БЦО) то элемент можно поворачивать по часовой стрелке на 90. Эл. связи между элементами показывают тонкими линиями толщиной 0, 5мм. Силовые цепи допускается изображать толстыми линиями. Все элементы на схеме должны иметь БЦО.
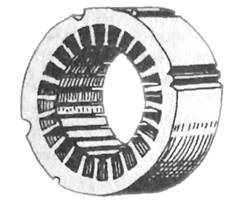
Виды схем Схемы подразделяют на следующие виды: №4 асинхр дв Асинхронный двигатель - это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока. Устройство
На рисунке: 1 - вал, 2, 6 - подшипники, 3, 8 - подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов. Основными частями асинхронного двигателя являются статор (10) и ротор (9). Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор. Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется " беличьей клеткой". В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Принцип работы При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся. Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение. Скольжение s - это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении. Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр - критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме - 1 - 8 %. Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся. Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей. Вопрос №5. Механическая характеристика Как основная, помогает проводить детальный анализ работы электродвигателя. Она выражает непосредственную зависимость частоты вращения самого ротора от электромагнитного момента n=f (M).
Точка 2 — номинальный режим работы. Точка 3 — частота вращения достигла критического значения. Пусковой момент Мпуск — точка 4. Существуют технические способы расчетов и построения механической характеристики с учетом данных паспорта. В первоначальной точке 1 n0=60f/p (p – количество пар полюсов). Поскольку nн и Mн непосредственно координаты точки 2, расчет номинального момента производится по формуле Mн=9, 55*Рн/ nн, где Рн — номинальная мощность. Значение nн указано в паспорте двигателя. В точке 3 Mкр=Mнλ. Пусковой момент в точке 4 Mпуск=Mн*λ пуск (значения λ, λ пуск — из паспорта). Механическая характеристика, построенная таким образом, называется естественной. Изменяя другие параметры можно получить искусственную механическую характеристику. Полученные результаты дают возможность проанализировать и согласовать механические свойства самого двигателя и рабочего механизма. Вопрос №6. Принцип работы АВ В режиме штатной работы через автомат протекает ток, меньший или равный номинальному значению. Питающее напряжение от внешней сети подается на верхнюю клемму, соединенную с неподвижным контактом. С неподвижного контакта ток поступает на замкнутый с ним подвижный контакт, а от него, через гибкий медный проводник – на катушку соленоида. После соленоида ток подается на тепловой расцепитель и уже после него – на нижнюю клемму, с подключенной к ней сетью нагрузки. В аварийных режимах автоматический выключатель отключает защищаемую цепь за счет срабатывания механизма свободного расцепления, приводимого в действие тепловым или электромагнитным расцепителем. Причиной такого срабатывания является перегрузка или короткое замыкание. Электромагнитное реле. Реле– это слаботочный электрический аппарат, предназначенный для выполнения логических и измерительных функций в цепях управления с током до 5 А. Имеет упрощенную контактную систему с увеличенным числом контактов, при отсутствии дугогасительных устройств. В реле при плавном изменении управляющего (входного) параметра до определенной наперед заданной величины происходит скачкообразное изменение управляемого (выходного сигнала) параметра. При этом хотя бы один из этих параметров должен быть электрическим. Реле может работать в трех режимах: - режим повторителя– срабатывание происходит при скачкообразном изменении выходной величины до ее максимального значения; - режим инвертора– супенчатое уменьшение выходного параметра до минимального уровня; - режим реле с памятью (режим триггера) – при этом достигнутое после срабатывания или отпускания значение выходного параметра сохраняется и запоминается после исчезновения входного сигнала. Реле позволяет осуществлять определенную последовательность в работе отдельных частей системы. Реле могут работать под воздействием самых различных факторов: электрического тока, световой энергии, давления жидкости или газа, уровня жидкости и т. п. По способу присоединения различают первичные, вторичные и промежуточные реле. Первичные реле включаются непосредственно в цепь управления. Вторичные реле включаются через измерительные трансформаторы тока или напряжения. Промежуточные реле работают от исполнительных органов других реле и предназначаются для усиления и размножения сигнала, т. е. распределения воздействия на несколько цепей. Основными параметрами реле являются: номинальные данные - ток, напряжение, время и другие величины, на которые рассчитаны реле; величина срабатывания, т. е. то значение параметра (ток, напряжение, время и пр.), при котором происходит автоматическое действие реле; реле реагирует на тот параметр, на который оно было изготовлено; уставка реле - значение величины срабатывания, на которую отрегулировано данное реле (реле имеет некоторое количество уставок, фиксирующих величину срабатывания в определенных пределах). Электромагнитные реле характеризуются следующими основными параметрами: напряжением (током) втягивания, т. е. наименьшим значением напряжения (или тока) на зажимах катушки реле, при котором якорь втягивается; напряжением (током) отпадения - наибольшим значением напряжения (или тока) на зажимах катушки реле, при котором происходит отпадение якоря; коэффициентом возврата реле - отношением напряжения (тока) отпадения к напряжению (току) втягивания. Реле состоит обычно из 3-х элементов: 1) воспринимающего, 2) промежуточного и 3) исполнительного. 1. Воспринимающий (чувствительный) реагирует на входной параметр и преобразует его в физическую величину, необходимую для работы реле; чувствительным элементом является, например, катушка реле. 2. Промежуточный элемент сравнивает преобразованную величину с эталоном. А по достижении заданного значения передает воздействие воспринимающего элемента исполнительному. Промежуточными составляющими контактных реле являются противодействующие пружины и успокоители. Успокоители применяются для успокоения колебаний подвижных частей, а в реле времени - для получения заданной выдержки времени. 3. Исполнительный элемент воздействует на управляемую цепь; исполнительными составляющими контактных реле являются контакты. 4. Вопрос № 13. Магнитные пускатели. Устройства, которые предназначены (основное их назначение) для автоматического включения и отключения трехфазных электрических двигателей от сети, а также их реверсирования называют магнитными пускателями. Как правило, они используются для управления асинхронными электродвигателями с напряжением питания до 600 В. Пускатели могут быть реверсивные и не реверсивные. Кроме того, в них довольно часто встраивается тепловое реле для защиты электрических машин от перегрузки по току в длительном режиме. Магнитные пускатели могут выпускаться в различных исполнениях:
Вопрос № 15 Первый Закон Электромеханическое преобразование энергии не может осуществляться с коэффициентом полезного действия 100%. Электромеханические преобразователи – сложные преобразователи, в которых преобразование электрической энергии (Рэл) в механическую ( Рмех) и обратно происходит с обязательным выделением тепловой энергии ( Рт). В каждой машине имеются потери в стали, обмотках, механические потери. По этой причине КПД всегда меньше 100%. Для электрической машины КПД можно определить как отношение полезной мощности к мощности, подводимой к электрической машине. Для генератора Второй закон Все электрические машины обратимы, ᴛ.ᴇ. одна и та же машина может работать в режимах двигателя и генератора. Обратимость электрической машины – основное отличие электромеханического преобразователя (ЭП) от других преобразователей. Работа в режимах двигателя и генератора – важнейшее преимущество ЭП, обеспечившее широкое применение электрических машин в промышленности. В режиме генератора активная мощность забирается с вала машины и преобразуется в электрическую, в режиме двигателя – поступает из сети и преобразуется в механическую. При этом реактивная мощность, идущая на создание магнитного поля, может ʼ ʼ поступатьʼ ʼ или ʼ ʼ отдаватьсяʼ ʼ в сеть независимо от режима работы ЭП. В трансформаторах энергия магнитного поля концентрируется, в основном, в магнитопроводе, а в генераторах и двигателях – в воздушном зазоре – пространстве между ротором и статором. Можно утверждать, что там и происходит электромеханическое преобразование энергии. Третий закон Электромеханическое преобразование энергии осуществляется полями, неподвижными относительно друг друга. Результирующее поле в машине создается полями статора и ротора. Ротор может вращаться с той же скоростью, что и поле, или с другой скоростью, однако поля ротора и статора в установившемся режиме неподвижны относительно друг друга. Угловая скорость ротора Угловая скорость поля ротора относительно ротора Электромагнитный момент Поля, перемещающиеся относительно друг друга, не создают электромагнитного момента͵ а создают только поток тепловой энергии. №24 Правило выбора эл дв Шаг 1-й: Узнать характеристики нагрузки. Применительно к однофазным электродвигателям, нагрузки разделяются на 3 категории: стабильный момент силы, внезапно изменяющийся момент силы и момент силы, который изменяется постепенно, через определённые промежутки времени.
Шаг 2-й. Рассмотрим мощность. Главное правило выбора мотора по мощности: нужно выбирать электродвигатель именно той мощности, какой нужно и стараться избегать её превышения или занижения.
Шаг 3-й. Запуск. Также необходимо учитывать силу инерции, особенно вовремя процедуры пуска.
Шаг 4: Регулировка в течение цикла работы. Циклом работы называется совокупность пошаговых операций, выполняемых мотором, в которые входят старт, работа в обычном режиме и остановка.
Шаг 5-й: Последний критерий выбора мотора, гипоксия.
Буквенно-цифровые обозначения Правила выполнения эл схем Виды схем Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 888; Нарушение авторского права страницы

 Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1.
Из графика видно, что на участке 1-3 машина работает устойчиво. 3-4 — непосредственный отрезок неустойчивой работы. Идеальный холостой ход соответствует точке 1. Для двигателя
Для двигателя 
 , угловая скорость поля ротора относительно неподвижного статора
, угловая скорость поля ротора относительно неподвижного статора  , где
, где  - угловая скорость поля статора,
- угловая скорость поля статора,  - угловая скорость ротора.
- угловая скорость ротора. , где Рэ – электромагнитная мощность или мощность, сконцентрированная в магнитном поле в воздушном зазоре машины.
, где Рэ – электромагнитная мощность или мощность, сконцентрированная в магнитном поле в воздушном зазоре машины.