
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ТЕОРИЯ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВАСтр 1 из 18Следующая ⇒
ЛЕКЦИИ 1- 3 ТЕОРИЯ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА ЛЕКЦИЯ 2 Применение уравнения движения для различных режимов движения подвижного состава Рассмотрим уравнение движения применительно к различным видам движения подвижного состава. Чтобы привести подвижной состав в движение, к нему нужно приложить силу тяги. Сила тяги подвижного состава F создается установленными на нем тяговыми двигателями. Однако наличие только силы тяги недостаточно для управления подвижным составом, так как она всегда действует в направлении его движения или равна нулю. Для остановки подвижного состава к нему необходимо приложить силу, направленную в сторону, противоположную движению. Она создается тормозными средствами и называется тормозной силой В . Сила тяги F и тормозная сила В являются управляемыми (их может регулировать водитель через аппараты управления). Существуют еще неуправляемые силы. К ним относятся сила тяжести подвижного состава G = mg и все остальные внешние силы (не поддающиеся регулированию), действующие на подвижной состав в направлении его движения или в обратном направлении. Они составляют силы сопротивления движению W. Положительным направлением для силы тяги F является направление движения подвижного состава, а для тормозной силы В и силы сопротивления движению W - направление, противоположное движению. Равнодействующей всех сил, одновременно приложенных к подвижному составу, является действующая сила Fд = F – W - B или в удельных величинах
где
Различают три основных режима движения подвижного состава: тяга, выбег и торможение. В режиме тяги к подвижному составу приложены сила тяги F и силы сопротивления движению W: Fд = F – W. В режиме выбега на подвижной состав действуют только силы сопротивления движению W: Fд = – W. В режиме торможения к подвижному составу приложены тормозная сила В и силы сопротивления движению W, тогда действующая сила: Fд = -(В + W). Все силы, действующие на подвижной состав, приложены к центру тяжести ПС. Интегрируя уравнение движения, можно получить зависимости скорости от пути v(l), скорости от времени v(t) и времени от пути t(l), которые называются кривыми движения подвижного состава. На рис. 1 приведены кривые движения v(t) и v(l) для перегона с неизменным профилем пути. Рассмотрим зависимости v(t), расположенную слева от оси ординат, и v(l), расположенную справа от оси ординат, при движении по характерным участкам.
Рис. 1. Кривые движения Режим тяги. Период тяги разделяется на периоды пуска подвижного состава ОА и ОА' и движения по автоматической характеристике АБ и А'Б'. При пуске тяговые двигатели развивают наибольшую силу тяги, которую при неавтоматическом пуске регулирует водитель. Ее следует поддерживать в среднем постоянной. Тангенс угла наклона кривой движения v (t) к оси времени определяет ускорение подвижного состава в данный момент. Если угол наклона отрезка ОА' к оси времени неизменен, то ускорение подвижного состава в момент пуска будет постоянным, а движение равномерно ускоренным. В момент пуска сила тяги всегда больше сопротивления движению (F > W), а действующая сила Fд = F - W положительна. Точки А и А' на кривой движения соответствуют моменту окончанию пуска и выхода на автоматическую характеристику со скоростью vn. В период движения по автоматической характеристике (участки АБ и А'Б') характер изменения скорости подвижного состава зависит от значения и направления действующей силы. Если действующая сила положительна Fд > 0 (F > W), скорость движения будет возрастать, но медленнее, чем при пуске, так как сила тяги с увеличением скорости уменьшается, а сопротивление движению возрастает. Поэтому на участке АБ (А'Б') скорость возрастает медленнее, чем на участке О А (ОА'). Точки Б и Б' соответствуют моменту выключения двигателей (тока) и началу выбега. Режим выбега. В период выбега подвижной состав движется по инерции, так как тяговые двигатели отключены, следовательно, ток и сила тяги отсутствуют (I = 0 и F = 0). Кинетическая энергия подвижного состава, накопленная в период движения под током, расходуется на преодоление сил сопротивления движению. Скорость подвижного состава при движении на горизонтальном участке, подъеме и малых спусках постепенно уменьшается (участки БВ и Б'В'), ускорение при этом становится отрицательным. Действующая сила в период выбега будет определяться силой сопротивления движению Fд = - W. Точки В и В' соответствуют моменту окончания выбега и началу режима торможения. Режим торможения. В период торможения создается значительная тормозная сила В, направленная против движения подвижного состава. В результате скорость подвижного состава быстро уменьшается, отрицательное ускорение (тормозное замедление аТ) по абсолютному значению велико. На кривых движения режим торможения определяется отрезками ВГ и ВГ', движение при этом равномерно замедленное, vT — скорость начала торможения. Тормозное замедление характеризуется тангенсом наклона отрезка ВГ' к оси времени. Действующая сила при этом будет замедляющей и будет определяться суммой тормозной силы и силы сопротивления движению.
ЛЕКЦИЯ 3 Рис. 2. Реализация силы тяги колесом
Тогда момент, приложенный к колесу,
где здесь R – радиус колеса;
здесь J – момент инерции вращающихся частей;
Направление движения указано стрелкой v. Представим момент Мк в виде пары сил FK с плечом, равным радиусу колеса R. Одна из этих сил приложена в точке А от колеса к рельсу и направлена против движения. Она стремится создать скольжение опорной точки колеса относительно рельса в сторону, противоположную поступательному движению. Однако как реакция на эту силу под действием нормального нажатия колеса GK в опорной точке А возникает благодаря наличию сцепления (трения) с рельсом или дорожным покрытием сила сцепления Тк. Эта сила Тк является реактивной, внешней по отношению к колесу и согласно третьему закону Ньютона равна и противоположна силе FK т. е. ТК = FK. Если сила сцепления Тк не превысит предельной величины Тк.пр, то точка А колеса, соприкасающаяся с рельсом или дорогой, окажется как бы неподвижной, т. е. мгновенным центром вращения. Вокруг этой точки под действием вращающего момента начнут поворачиваться все остальные точки колеса. Сила сцепления Тк будет непрерывно перемещать мгновенный центр вращения, а вместе с ним и колесо вдоль пути. В последующие моменты в соприкосновение с рельсом или дорогой будут приходить все новые и новые точки окружности колеса, оказывающиеся мгновенным центром его вращения. Таким образом, в результате возникновения в опорной точке А колеса на рельс или путь внешней силы Тк, направленной по касательной к окружности колеса, мгновенный центр его вращения непрерывно перемещается вдоль пути, а геометрический центр 0 получает поступательную скорость v. Приложенная к колесу внешняя сила Тк представляет собой силу сцепления, направленную по касательной к окружности колеса в точке его касания с поверхностью пути, и является силой тяги, вызывающей поступательное движение подвижного состава. Поэтому силу сцепления Тк называют касательной силой тяги на ободе движущего колеса. Силу FK, которая обусловлена вращающим моментом тягового двигателя, называют силой тяги . При равномерном движении подвижного состава, чему соответствует равномерное вращение колеса (угловая скорость ω = const), при отсутствии трения в подшипниках и передаче можно принять FK = TK. При ускоренном или замедленном вращении колеса с учетом трения в подшипниках силы FK и TK не будут равны, так как действующий на колесо результирующий момент Мк, согласно выражению
Это соотношение справедливо для одного колеса. Для подвижного состава соотношение между силой тяги F и силой сцепления Т будет иметь вид:
Ограничение силы тяги. Сила тяги ограничивается предельно допустимой силой сцепления, имеющей природу сил трения. Если этот предел будет превышен, произойдет срыв сцепления. Движущие колеса начнут скользить относительно пути в точке касания А. При этом их угловая скорость ω ' будет больше угловой скорости ω , соответствующей поступательной скорости v, на значение угловой скорости скольжения ω ск колес по рельсам ω ' = ω + ω ск. Начнется боксование колес, при котором происходит повышенный износ бандажей (или шин) и пути. По мере увеличения скорости скольжения сила сцепления колеса с поверхностью качения резко уменьшается, что приводит к чрезмерному увеличению частоты вращения двигателя. Это в свою очередь вызывает дальнейший рост скорости скольжения и соответственно снижение силы сцепления. Нормальное качение колеса становится невозможным. Поэтому при боксовании подвижного состава на тяжелых подъемах или скользкой дороге он останавливается и иногда не может тронуться с места вследствие вновь возникающего боксования. В этом случае нарушение сцепления может вызвать задержку движения. Восстановить сцепление колес с рельсами можно, увеличив силу сцепления. Следовательно, для предельной силы сцепления всего подвижного состава по выражению получим следующее ограничение:
откуда наибольшая допустимая по условию сцепления сила тяги
Величины Сила сцепления определяется как произведение силы нажатия GK колеса на рельс и коэффициента сцепления ψ к колеса с рельсом, т. е. Тк = Gк ψ к.
В тормозном режиме на каждую колесную пару вагона, движущегося в направлении, указанном стрелкой v, действует тормозной момент Мт, направленный против часовой стрелки. В этом же направлении будет приложен момент Мтр, определяемый внутренним сопротивлением в подшипниках. Момент Мj, определяемый инерциями колеса и связанных с ним вращающихся частей, будет направлен по часовой стрелке. Рис. 3. Реализация тормозной силы Результирующий момент М будет равен алгебраической сумме моментов, действующих на колесную пару: Представим тормозной момент парой сил Вк, приложенных соответственно в точках О и А. Если бы колеса вращались свободно, не касаясь рельсов или дороги, т. е. были приподняты над уровнем пути, то под действием тормозного момента они бы остановились. В действительности колеса опираются на рельсы или путь, следовательно, в точке соприкосновения А возникает сила сцепления Тк. Поэтому колеса не останавливаются, а продолжают катиться по пути, одновременно как бы упираясь в него под действием тормозного момента. Таким образом, под действием тормозной силы Вк в результате сцепления колеса с рельсом в точке А образуется внешняя сила Тк, направленная противоположно силе Вк. Точка А в каждый момент является как бы неподвижной, т. е. мгновенным центром вращения. В целом на подвижной состав действует сумма тормозных сил всех колес, которые можно заменить их равнодействующей. Условно эту равнодействующую можно считать приложенной к центру тяжести подвижного состава. При движении колеса силы Вк и Тк не будут равны, так как действующий на колеса результирующий момент М равен алгебраической сумме моментов. Следовательно, соотношение между силами Вк и Тк для одной оси будет иметь вид
и для всего подвижного состава
Ограничение тормозной силы. Если в режиме торможения тормозная сила В превысит предельно допустимую силу сцепления Тпр, произойдет заклинивание колес. Тормозные колеса начнут скользить относительно пути в точке А. Это явление называется юзом . При юзе резко уменьшается тормозная сила, так как она определяется коэффициентом трения качения между колесом и рельсом при скольжении их относительно друг друга. А коэффициент скольжения всегда меньше коэффициента сцепления, соответствующего нормальному торможению. Юз — опасное явление для безопасности движения, так как во время юза увеличиваются время торможения итормозной путь. Кроме того, во время юза при скольжении колес происходит сильное истирание бандажей колесных пар или шин троллейбуса. Таким образом, предельная сила сцепления всего подвижного состава будет иметь следующие ограничения:
откуда наибольшая допустимая по условиям сцепления тормозная сила
Величины Движению Структура расчетных зависимостей основного сопротивления движению. На основное сопротивление движению влияют многие разнообразные постоянные и переменные факторы, взаимосвязанные и зависящие друг от друга. Поэтому определение основного сопротивления движению аналитическим путем очень сложно и весьма неточно. В результате экспериментальных исследований установлено, что определяющее влияние на основное сопротивление движению рельсового транспорта оказывают два фактора: скорость движения и сила нажатия колесной пары на рельсы. С увеличением скорости основное удельное сопротивление движению растет, с увеличением силы нажатия колесной пары на рельсы оно уменьшается. При практических расчетах основного удельного сопротивления движению применяют эмпирические формулы вида ω = а + вv + сv2, где а, в и с — постоянные числовые коэффициенты, получаемые опытным путем и отражающие влияние различных факторов на основное сопротивление движению. Коэффициенты а и в характеризуют силы трения, определяемые конструкцией подвижного состава, коэффициент с - сопротивление воздушной среды. Каждому типу подвижного состава соответствуют разные значения коэффициентов а, в и с. Для подвижного состава небольшой длины коэффициент в можно принять равным нулю. Сопротивление движению в режимах тяги, выбега и торможения. Для моторных вагонов рассматривают зависимости основного сопротивления движению в режиме тяги или электрического торможения, т. е. движении, когда тяговые двигатели обтекаются током (движение под током) и в режиме выбега. При движении под током силы сопротивления движению, обусловленные механическими потерями в тяговых двигателях, тяговой передаче, моторно-осевых подшипниках, учтены в электромеханических характеристиках тяговых двигателей. Поэтому при движении под током расчетное сопротивление движению меньше, чем в режиме выбега и механического торможения на значение сил, которые вызываются этими потерями. В реальных условиях эта разница вызвана тем, что при движении под током потери энергии в тяговых двигателях, тяговой передаче, подшипниках, которые учитываются в характеристиках двигателей, покрываются энергией, потребляемой из контактной сети. При движении в режиме выбега на покрытие этих потерь расходуется кинетическая энергия, накопленная подвижным составом, и эти потери учитываются увеличением сопротивления движению на значение Δ ω 0.
Рис. 1. Зависимость основного сопротивления движению под током и без тока от скорости Рис. 2. Определение сопротивления движению от уклона Подставляя выражение (2) в выражение (1), получим, ‰
Следовательно, уклон, выраженный в ‰, - это число метров высоты, приходящихся на 1 км горизонтальной длины пути. Сопротивление движению подвижного состава от уклона, кН,
На реальном профиле пути подъемы не превышают 2 – 2.50, поэтому можно принять, что
или, Н,
Удельное сопротивление движению от уклона, Н/кН,
Как следует из выражения (3), удельное сопротивление движению от уклона численно равно уклону в тысячных долях и не зависит ни от скорости, ни от типа подвижного состава. Формула (3) выведена при движении на подъеме. Но она будет справедлива и для движения на спуске. На спуске составляющая силы тяжести направлена по движению подвижного состава и является ускоряющей силой. Это учитывается в формуле (3) тем, что на спусках значение уклона i является отрицательным. ЛЕКЦИИ 4-5 Рис. 1. Электромеханические характеристики на валу двигателя ДК-254Б Рис. 2. Построение зависимости магнитного потока от тока якоря Скорость двигателя v, приведенная к ободу движущего колеса, приблизительно обратно пропорциональна потоку; при токе, близком к нулю, она стремится к бесконечности. С увеличением тока скорость вначале резко падает, что соответствует прямолинейной части характеристики СФ(I).
Рис.3. Принципиальная схема включения тягового двигателя последовательного возбуждения (а) и его электромеханические характеристики на ободе движущего колеса (б)
При дальнейшем увеличении тока по мере насыщения магнитной цепи машины скорость снижается в меньшей степени, как это показано на рис. 3. Электромагнитная сила FЭМ = 3, 6СФI при малых нагрузках, когда магнитный поток прямо пропорционален току, растет от нуля приблизительно пропорционально квадрату тока, т. е. по параболической зависимости. При дальнейшем увеличении нагрузки по мере насыщения машины кривая FЭM(I) отклоняется от параболы и приближается к прямой, т. е. изменяется прямо пропорционально току. Характеристика силы тяги F(I) подобна характеристике электромагнитной силы, но ее ординаты меньше на величину Δ F, определяемую магнитными и механическими потерями в двигателе и потерями в передаче. Поэтому кривая F(I) не проходит через начало координат, а пересекает ось абсцисс при некотором малом токе Ix, соответствующем холостому ходу машины. При таком токе и номинальном напряжении работа двигателя недопустима из-за резкого повышения частоты вращения якоря. Характеристика к. п. д. η (I) при малых нагрузках стремится к нулю при токе Ix и силе тяги, равной нулю. Эта точка соответствует холостому ходу, когда вся подведенная мощность затрачивается в основном на покрытие механических потерь. С увеличением нагрузки к. п. д. быстро растет по мере снижения механических потерь и достигает своего максимума в области, близкой кноминальным нагрузкам. Точка расположения максимума к. п. д. зависит от соотношения механических и электрических потерь. При дальнейшем увеличении нагрузки к. п. д. постепенно снижается в результате увеличения электрических потерь, пропорциональных квадрату тока. При нагрузке, намного превышающей допустимую, при которой падение напряжения в двигателе 1r становится равным напряжению UД, скорость
Рис. 4. Электромеханические характеристики на ободе движущего колеса тягового двигателя последовательного возбуждения при DK = 780 мм, μ = 7, 98, η З.=0, 97 Характеристики двигателя параллельного возбуждения. У двигателя параллельного возбуждения обмотку возбуждения к сети подключают через регулируемый реостат. Ток возбуждения пропорционален приложенному напряжению, следовательно, магнитодвижущая сила (м. д. с.) не зависит от тока якоря. С увеличением тока якоря I магнитный поток СФ незначительно уменьшается
Характеристика электромагнитной силы тяги FЭM(I) изображается прямой линией, проходящей через начало координат, так как магнитный поток практически постоянен. Сила тяги F отличается от электромагнитной силы на значение потерь Δ F и пересекает ось абсцисс при токе холостого хода Iх. Если приложить к подвижному составу внешнюю силу, направленную по движению (например, при движении на крутом спуске), то скорость подвижного состава v и э. д. с. Е = СФv начнут увеличиваться. При некоторой скорости, равной v0, э д. с. двигателя станет равной приложенному напряжению Uд. Ток двигателя в соответствии с выражением Так как направление магнитного потока при этом не изменится, то сила тяги тоже изменит свой знак и будет направлена против движения, следовательно, станет тормозной силой. Тяговый двигатель при этом автоматически перейдет в генераторный режим и будет отдавать энергию в тяговую сеть. Такой режим называется рекуперативным торможением . При этом двигатели будут тормозить подвижной состав, одновременно возвращая электрическую энергию в питающую сеть. Скоростная характеристика двигателя параллельного возбуждения (см. рис. 6) в генераторном режиме расположена во втором квадранте, а характеристики электромагнитной силы и силы тяги (в данном режиме тормозные силы) расположены в третьем квадранте и являются продолжением соответствующих характеристик двигательного режима. Кривая к. п. д. η (I) двигателя параллельного возбуждения в тяговом режиме имеет такой же вид, как у двигателя последовательного возбуждения. В генераторном режиме к. п. д. представляет отношение отданной электрической мощности к подведенной механической мощности. Он равен нулю при токе якоря, равном току параллельных цепей IП затем, увеличиваясь, достигает максимума при отрицательных нагрузках, близких к номинальным, и вновь начинает уменьшаться по мере дальнейшего увеличения нагрузки. Характеристики двигателя согласно-смешанного возбуждения. Двигатели смешанного возбуждения имеют две обмотки возбуждения: последовательную и параллельную. У двигателя согласно-смешанного возбуждения м. д. с. обеих обмоток складывается. Следовательно, суммарная магнитодвижущая сила
где I и ω c - соответственно ток якоря и числовитков последовательной обмотки возбуждения; IШиω Ш - соответственно токи число витков параллельной обмотки Если величину Таким образом, при токе якоря, равном нулю, м. д. с. и поток не равны нулю, а создаются током Iо, т. е. м. д. с. параллельной обмотки. Скоростная характеристика двигателя v(I) имеет примерно такой же вид, как и у двигателя последовательного возбуждения, но сдвинута влево на ток I0. В действительности скоростные характеристики двигателя согласно-смешанного и последовательного возбуждения несколько отличаются по форме, так как при одинаковых м. д. с. токи якоря, а следовательно, и падение напряжения в силовой цепи двигателя будут различны.
Рис. 7. Принципиальная схема включения тягового двигателя согласно-смешанного возбуждения (а) и его электромеханические характеристики на ободе движущего колеса (б) При токе якоря, равном нулю, в двигателе согласно-смешанного возбуждения остается м. д. с. параллельной обмотки ω Ш. Это обеспечивает автоматический переход в генераторный режим (режим рекуперативного торможения). При этом ток якоря изменяет свое направление, а ток в параллельной обмотке протекает в том же направлении, что и в двигательном режиме, поэтому в режиме рекуперативного торможения машина работает, как генератор встречно-смешанного возбуждения. При этом м. д. с. последовательной обмотки вычитается из м. д. с. параллельной обмотки. Поэтому с увеличением тока рекуперации магнитный поток в машине будет уменьшаться, скорость сильно возрастет и будет стремиться к бесконечности при токе рекуперации, равном Iо. Характеристика электромагнитной силы тяги FЭМ(I) в двигательном режиме практически прямолинейна, вследствие того, что машина работает в насыщенной области магнитной характеристики. При переходе в генераторный режим электромагнитная сила тяги меняет знак и становится тормозной силой, препятствующей движению подвижного состава. По мере увеличения тока рекуперации электромагнитная сила FЭМ = 3, 6СФI сначала возрастает по абсолютному значению. При больших токах рекуперации абсолютное значение FЭМ уменьшается и при токе рекуперации Iо падает до нуля, так как намагничивающая сила становится равной нулю. Сила тяги F меньше электромагнитной силы на значение потерь Δ F. При этом в двигательном режиме сила тяги F по абсолютному значению меньше, а в генераторном режиме больше электромагнитной силы FЭМ. Характеристики η (I) как в двигательном, так и тормозном режиме имеют такой же вид, как и у двигателя параллельного возбуждения. К. п. д. равен нулю в тяговом режиме при токе холостого хода Iх, а в генераторном режиме - при токе якоря Iш. Характеристики двигателя встречно-смешанного возбуждения. У двигателя встречно-смешанного возбуждения м. д. с. обеих обмоток не складывается, а вычитается при двигательном режиме. Двигатель встречно-смешанного возбуждения, у которого м. д. с. параллельной обмотки больше м. д. с. последовательной обмотки, непригоден для электрической тяги из-за его электрической неустойчивости. Двигатель встречно-смешанного возбуждения, у которого м. д. с. последовательной обмотки больше м. д. с. параллельной обмотки, обладает практически такими же характеристиками, как и двигатель последовательного возбуждения. Отличие заключается в том, что начало кривой СФ(/) сдвигается от начала координат вправо на значение тока
Рис. 8. Принципиальная схема включения тягового двигателя встречно-смешанного возбуждения (а) и его электромеханические характеристики на ободе движущего колеса (б) Рис. 9. Тяговая характеристика подвижного состава В большинстве случаев для целей тяги наиболее благоприятными являются мягкие тяговые характеристики. Наибольшая допустимая нагрузка тягового двигателя ограничивается его механической прочностью, устойчивой коммутацией и опрокидывающим моментом. Для каждого двигателя при определенной схеме его включения установлен наибольший допустимый ток Iп max, вышекоторого двигатель нагружать нельзя. Этому току соответствует максимальная сила тяги F л max. Ограничение тяговой характеристики по условию максимальной нагрузки двигателя представлено на рис. 9 линией 1. Наибольшая допустимая сила тяги по условиям сцепления
Ограничение силы тяги по сцеплению изображено линией 2 на рис. 9. Наивысшая точка тяговой характеристики (точка 0') будет соответствовать тому из рассмотренных ограничений, которое дает меньшую силу тяги. Для рельсового транспорта в большинстве случаев наибольшая допустимая сила тяги определяется условиями сцепления. При этом боксование колес является как бы своеобразной защитой тяговых двигателей, не допускающей их перегрузки. Тяговые характеристики имеют ограничение также по наибольшей допустимой скорости движения, которая является конструкционной скоростью Vконстр. Эта скорость определяется прочностью тягового двигателя и конструктивными качествами всего подвижного состава. На рис. 9 ограничение по наибольшей допустимой скорости представлено линией 3. Тяговые характеристики двигателей различных систем возбуждения. Тяговые характеристики двигателей различных систем возбуждения представлены на рис. 10.
Тяговая характеристика двигателя параллельного возбуждения (кривая 2) жесткая и близка к прямой линии. При некоторой скорости она пересекает ось абсцисс и продолжается в область отрицательных (тормозных) сил. Кривая 3 изображает тяговую характеристику двигателя согласно-смешанного возбуждения.
Рис. 10. Тяговые характеристики двигателей Распределение нагрузок Разница электромеханических характеристик двигателей одного и того же типа приводит к тому, что скорости двигателей при одном и том же значении момента неодинаковы. Действующий стандарт на тяговые двигатели допускает отклонение частот вращения отдельных двигателей до ±4% от типовой характеристики в номинальном режиме. Различие характеристик двигателей, установленных на одном и том же подвижном составе, приводит к неравномерному распределению нагрузок между ними и, как следствие этого, неодинаковому потреблению токов. Рассмотрим тяговые характеристики двух двигателей последовательного (рис. 3, а) и параллельного (рис. 3, 6) возбуждения. Оба двигателя каждого типа установлены на одном и том же подвижном составе и работают параллельно, поэтому скорости на ободах их колес должны быть одинаковы. Пусть они равны v'.
Рис. 3. определение расхождения сил тяги при двигателях последовательного (а) и параллельного (б) возбуждения Как следует из рис. неравномерность в распределении нагрузок у двигателей последовательного возбуждения меньше, чем у двигателей параллельного возбуждения. Следовательно, чем мягче характеристики, тем меньше расхождение нагрузок параллельно работающих двигателей. Из рис. (а) видно, что расхождение в силах тяги двух отличающихся тяговых характеристик при скорости v' можно принять
где Разделив обе части выражения на F, получим
где величина Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1354; Нарушение авторского права страницы
 ,
, 
 - удельная сила тяги, Н/кН;
- удельная сила тяги, Н/кН;  - удельное сопротивление движению, Н/кН;
- удельное сопротивление движению, Н/кН;  - удельная тормозная сила, Н/кН;
- удельная тормозная сила, Н/кН;  - удельная действующая сила, Н/кН.
- удельная действующая сила, Н/кН.
 ,
,  ,
,  - сопротивление движению от трения в подшипниках;
- сопротивление движению от трения в подшипниках;  ,
,  - угловое ускорение.
- угловое ускорение. .
. .
. ,
,  .
. и
и  малы по сравнению с величиной Тпр. Поэтому приближенно можно принять для подвижного состава
малы по сравнению с величиной Тпр. Поэтому приближенно можно принять для подвижного состава  .
. Образование тормозной силы. Определим условие нормального качения колеса при торможении. В период торможения к поезду приложена тормозная сила. Рассмотрим процесс образования этой силы на примере одного колеса (рис. 3).
Образование тормозной силы. Определим условие нормального качения колеса при торможении. В период торможения к поезду приложена тормозная сила. Рассмотрим процесс образования этой силы на примере одного колеса (рис. 3). .
.
 .
. ,
,  .
. .
.
 .
. . Тогда сопротивление движению от уклона, кН,
. Тогда сопротивление движению от уклона, кН,  ,
,  .
. . (3)
. (3)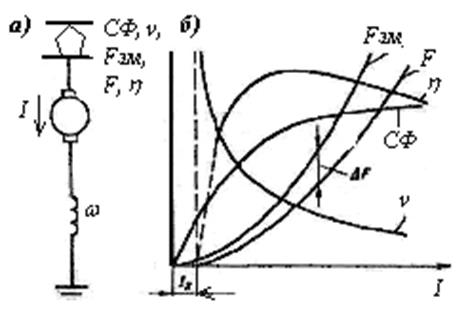
 , отданная мощность Fv и, следовательно, к. п. д. станут равными нулю. Этот предельный режим соответствует заторможенному состоянию двигателя, при котором вся подведенная мощность UДI затрачивается на покрытие электрических потерь I2r. Электромеханические характеристики на ободе движущего колеса зависят от диаметра колеса DK, передаточного отношения редуктора μ , и его к. п. д., η З (рис. 4). Если эти величины изменяются, то изменяется и характер электромеханических характеристик данного двигателя на ободе колеса. Поэтому на электромеханических характеристиках двигателя на ободе колеса обязательно указываются значения DK, μ и η З.
, отданная мощность Fv и, следовательно, к. п. д. станут равными нулю. Этот предельный режим соответствует заторможенному состоянию двигателя, при котором вся подведенная мощность UДI затрачивается на покрытие электрических потерь I2r. Электромеханические характеристики на ободе движущего колеса зависят от диаметра колеса DK, передаточного отношения редуктора μ , и его к. п. д., η З (рис. 4). Если эти величины изменяются, то изменяется и характер электромеханических характеристик данного двигателя на ободе колеса. Поэтому на электромеханических характеристиках двигателя на ободе колеса обязательно указываются значения DK, μ и η З.
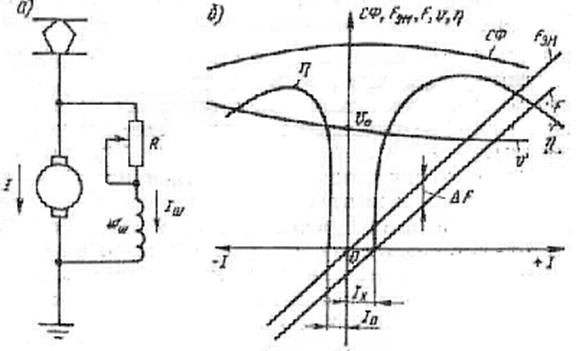 Рис. 5. Принципиальная схема включения тягового двигателя параллельного возбуждения (а) и его электромеханические характеристики на ободе движущего колеса (б)
Рис. 5. Принципиальная схема включения тягового двигателя параллельного возбуждения (а) и его электромеханические характеристики на ободе движущего колеса (б)  станет равным нулю. При дальнейшем увеличении скорости э. д. с. станет больше приложенного напряжения, и ток в двигателе изменит свое направление.
станет равным нулю. При дальнейшем увеличении скорости э. д. с. станет больше приложенного напряжения, и ток в двигателе изменит свое направление. ,
,  обозначить через I0, то м. д. с. машины согласно-смешанного возбуждения будет равна
обозначить через I0, то м. д. с. машины согласно-смешанного возбуждения будет равна  . Таким образом, двигатель согласно-смешанного возбуждения можно представить как машину с одной последовательной обмоткой возбуждения, по которой протекает ток якоря I и некоторый дополнительный ток I0. Зависимость СФ(I) двигателя согласно-смешанного возбуждения имеет такой же вид, как и у двигателя последовательного возбуждения, с той лишь разницей, что кривая СФ сдвинута влево от начала координат на значение тока I0, как это показано на рис. 7.
. Таким образом, двигатель согласно-смешанного возбуждения можно представить как машину с одной последовательной обмоткой возбуждения, по которой протекает ток якоря I и некоторый дополнительный ток I0. Зависимость СФ(I) двигателя согласно-смешанного возбуждения имеет такой же вид, как и у двигателя последовательного возбуждения, с той лишь разницей, что кривая СФ сдвинута влево от начала координат на значение тока I0, как это показано на рис. 7.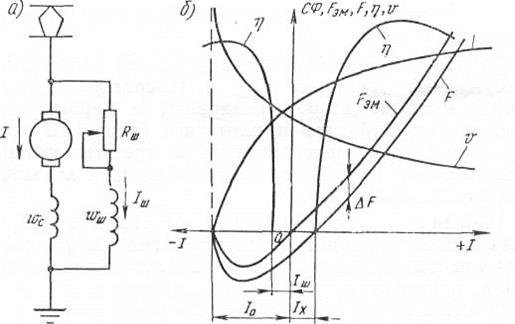
 . Поэтому на это же значение тока сдвигаются вправо все электромеханические характеристики (рис. 8).
. Поэтому на это же значение тока сдвигаются вправо все электромеханические характеристики (рис. 8).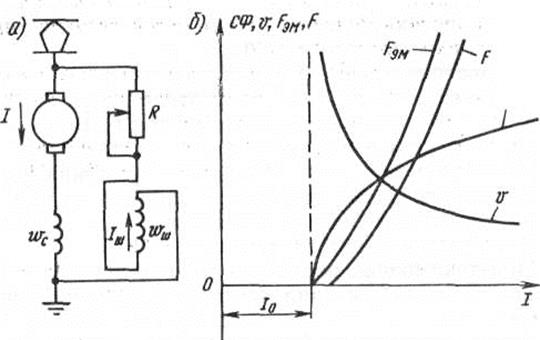

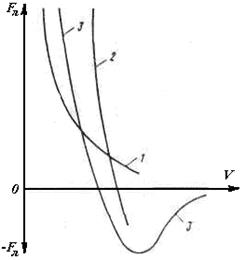 Как видно из тяговой характеристики двигателя последовательного возбуждения (кривая 1) в зоне малых скоростей сила тяги при увеличении скорости резко падает. При дальнейшем увеличении скорости сила тяги изменяется незначительно, т. е. тяговая характеристика становится мягкой.
Как видно из тяговой характеристики двигателя последовательного возбуждения (кривая 1) в зоне малых скоростей сила тяги при увеличении скорости резко падает. При дальнейшем увеличении скорости сила тяги изменяется незначительно, т. е. тяговая характеристика становится мягкой.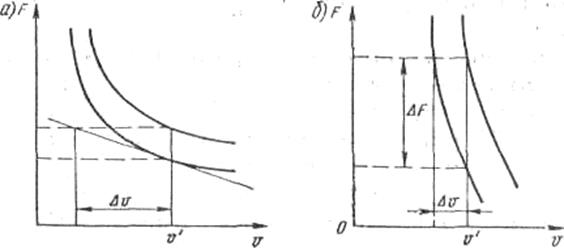
 ,
,  - угол наклона спрямленной части тяговой характеристики.
- угол наклона спрямленной части тяговой характеристики. ,
,  - коэффициент относительной жесткости.
- коэффициент относительной жесткости.