
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Сравнение двигателей различных систем возбуждения
Требования, предъявляемые к тяговым двигателям. Основными требованиями, которым должны удовлетворять тяговые двигатели, являются: электрическая устойчивость, т. е. способность автоматически стремиться к состоянию электрического равновесия при переходе с одного режима на другой; механическая устойчивость, т. с. способность автоматически приближаться к состоянию динамического равновесия; равномерное распределение нагрузок между параллельно работающими двигателями; максимальное использование сцепного веса; устойчивость коммутации; наименьшее воздействие на энергосистему; возможность плавного регулирования скорости и применения рекуперации; простота конструкции. Электрическая устойчивость. Анализ электрической устойчивости работы тяговых двигателей проводится при следующих допущениях: пренебрегаем вихревыми токами, возникающими в двигателе; рассматриваем только силовую цепь двигателя и считаем, что при случайных отклонениях от состояния равновесия всиловой цепи токи в параллельных ветвях остаются неизменными. Для силовой цепи двигателя постоянного тока уравнение переходного процесса можно представить в виде
где UД - напряжение, приложенное к двигателю; СФv - э. д. с. двигателя; I - ток якоря двигателя; r - сопротивление цепи двигателя; L - индуктивность силовой цепи двигателя. Если по каким-либо причинам произойдет увеличение тока, электрически устойчивая система будет стремиться вернуться к положению равновесия, т. е. уменьшить ток. При этом производная
Из выражения (1) следует
Следовательно, условие электрического равновесия запишется в виде
или
откуда следует, что
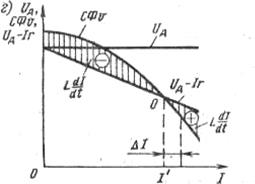
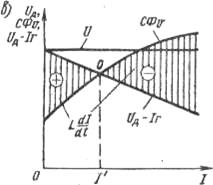
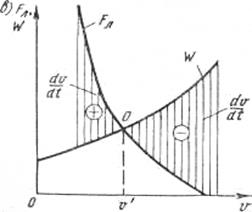
Как следует из полученного соотношения, для того, чтобы система находилась в состоянии электрического равновесия, необходимо, чтобы при увеличении тока э. д. с. двигателя СФv, которая уравновешивается разностью приложенного напряжения UД и падением напряжения Ir, возрастала бы в большей степени, чем эта разность. На рис. 1 представлены диаграммы напряжений (Uд, э. д. с. СФv и падений напряжения для двигателей последовательного (а), параллельного (6), согласно-смешанного (в) и встречно-смешанного (г) возбуждения.
Рис. 1. К анализу электрической устойчивости двигателей последовательного возбуждения (а), параллельного (б), согласно0смешанного (в) и встречно-смешанного (г) На приведенных диаграммах кривые э.д.с. СФv подобны кривым СФ(I) для каждой системы возбуждения двигателей. Напряжение UД, приложенное к двигателю, принимается постоянным, а линии (UД - Ir) представляют разность между приложенным к двигателю напряжением UД и падением напряжения в цепи двигателя. Ординаты заштрихованных площадей представляют собой значения Как следует из приведенных диаграмм, электрически устойчивыми являются двигатели последовательного, согласно-смешанного и параллельного возбуждения. Причем у двигателя параллельного возбуждения характеристика СФv(I) дважды пересекается с прямой UД - Ir в точках О и О'. Но условие устойчивого электрического равновесия
соблюдается только в точке О. Двигатели встречно-смешанного возбуждения в точке О и параллельного в точке О', которые соответствуют значительным нагрузкам, неустойчивы, так как
Анализ электрической устойчивости двигателя последовательного возбуждения показывает, если в точке О электрического равновесия произойдет случайное увеличение тока на некоторое значение Δ I, то разность UД - Ir станет меньше э. д. с. СФv. Э. д. с. самоиндукции Механическая устойчивость. Из уравнения движения подвижного состава в режиме тяги
следует, что динамическое равновесие будет определяться равенством FЛ - W = 0. Характеристика двигателя будет механически устойчива, если справедливо соотношение
Тогда:
или
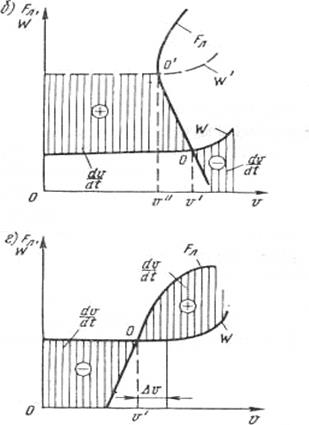
Производная силы тяги по скорости должна быть меньше производной противодействующей силы. На рис. 2 представлены тяговые характеристики FЛ(v), кривые сопротивления движению W(v) для двигателей последовательного (а), параллельного (6), согласно-смешанного (в) и встречно-смешанного (г) возбуждения. Точки пересечения О кривых F и W соответствуют установившимся скоростям
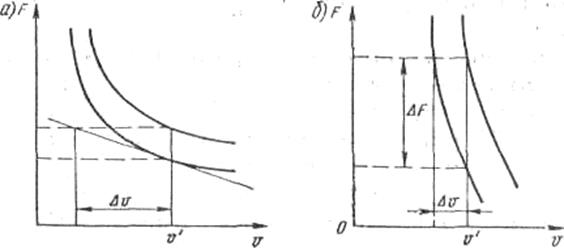
Рис. 2. К анализу механической устойчивости двигателя последовательного (а), параллельного (б), согласно-смешанного (в) и встречно-смешанного (г) Устойчивым динамическим равновесием обладают двигатели последовательного (а) и согласно-смешанного возбуждения (в), поскольку сила тяги FЛ, падает, а сила сопротивления движению W растет с увеличением скорости v. Так, при случайном увеличении скорости на некоторое значение Δ v сила тяги FЛ станет меньше силы сопротивления W. Ускорение Двигатель встречно-смешанного возбуждения с преобладающей параллельной обмоткой (г) механически неустойчив, поэтому он не применяется в электрической тяге. Распределение нагрузок Разница электромеханических характеристик двигателей одного и того же типа приводит к тому, что скорости двигателей при одном и том же значении момента неодинаковы. Действующий стандарт на тяговые двигатели допускает отклонение частот вращения отдельных двигателей до ±4% от типовой характеристики в номинальном режиме. Различие характеристик двигателей, установленных на одном и том же подвижном составе, приводит к неравномерному распределению нагрузок между ними и, как следствие этого, неодинаковому потреблению токов. Рассмотрим тяговые характеристики двух двигателей последовательного (рис. 3, а) и параллельного (рис. 3, 6) возбуждения. Оба двигателя каждого типа установлены на одном и том же подвижном составе и работают параллельно, поэтому скорости на ободах их колес должны быть одинаковы. Пусть они равны v'.
Рис. 3. определение расхождения сил тяги при двигателях последовательного (а) и параллельного (б) возбуждения Как следует из рис. неравномерность в распределении нагрузок у двигателей последовательного возбуждения меньше, чем у двигателей параллельного возбуждения. Следовательно, чем мягче характеристики, тем меньше расхождение нагрузок параллельно работающих двигателей. Из рис. (а) видно, что расхождение в силах тяги двух отличающихся тяговых характеристик при скорости v' можно принять
где Разделив обе части выражения на F, получим
где величина Следовательно, если
Рис. 4. Определение расхождения нагрузок двигателей последовательного возбуждения (а) и параллельного (б)
Рассмотрим скоростные характеристики двух двигателей последовательного (рис. 4, а) и параллельного (рис. 4, 6) возбуждений. Различие в характеристиках двигателей приводит к тому, что при одной и той же скорости v0 двигатели потребляют различные токи, и это различие очень существенно у двигателей с жёсткими характеристиками. Кроме того при скорости v1 может получиться так. Что один двигатель работает в двигательном режиме и потребляет ток I4, а другой – в генератороном и рекуперирует ток I3.. Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1055; Нарушение авторского права страницы
 , (1)
, (1) будет отрицательной. Если же произойдет случайное уменьшение тока, возврат к положению электрического равновесия должен сопровождаться увеличением тока. Отсюда следует, что в электрически устойчивой системе знаки отклонения тока и производной противоположны. Условие электрической устойчивости системы в данном случае может быть записано в виде
будет отрицательной. Если же произойдет случайное уменьшение тока, возврат к положению электрического равновесия должен сопровождаться увеличением тока. Отсюда следует, что в электрически устойчивой системе знаки отклонения тока и производной противоположны. Условие электрической устойчивости системы в данном случае может быть записано в виде . (2)
. (2) . (3)
. (3) ,
,  ,
, 

 и характеризуют знак и скорость изменения тока. Точки пересечения О являются точками электрического равновесия, так как в этих точках
и характеризуют знак и скорость изменения тока. Точки пересечения О являются точками электрического равновесия, так как в этих точках  и
и  .
.
 .
.
 .
. , т.к. в них
, т.к. в них  и
и  . Ординаты заштрихованных площадей представляют величины, пропорциональные ускорению
. Ординаты заштрихованных площадей представляют величины, пропорциональные ускорению  с соответствующими знаками.
с соответствующими знаками.
 ,
,  - угол наклона спрямленной части тяговой характеристики.
- угол наклона спрямленной части тяговой характеристики. ,
,  - коэффициент относительной жесткости.
- коэффициент относительной жесткости. , то получаем абсолютно жесткую характеристику; если
, то получаем абсолютно жесткую характеристику; если  , то получаем абсолютно мягкую характеристику.
, то получаем абсолютно мягкую характеристику.