
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кривые второго порядка: эллипс, парабола, гипербола ⇐ ПредыдущаяСтр 8 из 8
1. Эллипсом называется геометрическое место точек плоскости, координаты которых удовлетворяют уравнению
где Уравнение (21) называется каноническим уравнением эллипса. Параметры эллипса: Точки F1(–c, 0) и F2(c, 0), где Точки А1(–а, 0), А2(а, 0), В1(0, –b), B2(0, b) называются вершинами эллипса, при этом А1А2 = 2а образует большую ось эллипса, а В1В2 – малую,
Рис. 12 Основные параметры эллипса, характеризующие его форму: ε = с/a – эксцентриситет эллипса;
Для эллипса справедливо: Эксцентриситет эллипса выражает его меру «сжатости». 2. Если b > a > 0, то эллипс также задается уравнением (21), для которого вместо условия (22) выполняется условие
Тогда 2а – малая ось, 2b – большая ось,
Рис. 13 При условии Точки эллипса обладают характеристическим свойством: сумма расстояний от каждой из них до фокусов есть величина постоянная, равная 2а (рис. 12). 3. Для параметрического задания эллипса (21) в случаях (22) и (23) в качестве параметра t может быть взята величина угла между радиус-вектором точки, лежащей на эллипсе, и положительным направлением оси Ox:
4. Если центр эллипса с полуосями
Гиперболой называется геометрическое место точек плоскости, координаты которых удовлетворяют уравнению
где Параметры гиперболы: Точки F1(–c, 0), F2(c, 0), где
Рис. 19 Величина
Для гиперболы справедливо: ε > 1, директрисы не пересекают границу и внутреннюю область гиперболы, а также обладают свойством Говорят, что уравнение
задает уравнение гиперболы, сопряженной данной (рис. 20). Его можно записать также в виде
В таком случае ось
Рис. 20 Точки гиперболы обладают важным характеристическим свойством: абсолютное значение разности расстояний от каждой из них до фокусов есть величина постоянная, равная 2a (рис. 19). Для параметрического задания гиперболы в качестве параметра t может быть взята величина угла между радиус-вектором точки, лежащей на гиперболе, и положительным направлением оси Ox:
Параболой называется геометрическое место точек плоскости, координаты которых удовлетворяют уравнению Параметры параболы: Точка F(p/2, 0) называется фокусом параболы, величина p – параметром, точка О(0, 0) – вершиной. При этом прямая OF, относительно которой парабола симметрична, задает ось этой кривой.
Рис. 24
Величина Основное характеристическое свойство параболы: все точки параболы равноудалены от директрисы и фокуса (рис. 24). Существуют иные формы канонического уравнения параболы, которые определяют другие направления ее ветвей в системе координат (рис. 25).:
Рис. 25 Для параметрического задания параболы в качестве параметра t может быть взята величина ординаты точки параболы:
где t – произвольное действительное число. Поверхности второго порядка Поверхностью второго порядка называется поверхность S, общее уравнение которой в декартовой прямоугольной системе координат имеет вид
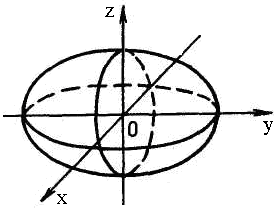
где коэффициенты при одночленах второй степени одновременно не равны нулю. Существует девять типов невырожденных поверхностей, уравнения которых с помощью преобразования координат могут быть приведены к одному из следующих видов. Эти уравнения определяют тип поверхности и называются каноническими уравнениями: 1. Эллипсоид:
2. Гиперболоид
3. Конус второго порядка:
4. Параболоид
5. Цилиндр
3) параболический:
Основным методом исследования формы поверхности является метод сечений, который состоит в следующем. Поверхность пересекается координатными плоскостями и им параллельными, а затем на основании вида полученных в сечениях линий делается вывод о виде поверхности. Таким образом изучаются основные геометрические свойства невырожденных поверхностей второго порядка на основе их канонических уравнений. При этом, когда в общем уравнении поверхности коэффициенты В определенных случаях уравнение (22) поверхности может быть приведено к уравнениям, задающим так называемые вырожденные поверхности. Приведем примеры таких случаев.
Матрицы и действия над ними Матрицей называется прямоугольная таблица, составленная из элементов некоторого множества. Горизонтальные ряды такой таблицы называются строками матрицы, а вертикальные – ее столбцами. Матрицы обозначают A, B, C, X …. Запись aij используется для указания местоположения элемента матрицы (i – номер строки, j – номер столбца ). Числовую матрицу размера
Ee обозначают также При Квадратная матрица вида
где Верхней и нижней треугольной матрицами называются квадратные матрицы вида
Трапециевидной матрицей называется матрица вида
Нулевой матрицей называется матрица, все элементы которой равны нулю. Обозначают такую матрицу буквой O. Две матрицы одинакового размера
называются равными, если Суммой матриц (2) называется матрица A+B размера m× n, состоящая из элементов Произведением матрицы Am× n на число α называется матрица Разностью матриц (2) называется матрица A–B = A+ (–1)B. Свойства опреаций сложения матриц и умножения на число: 1) 2) 3) 0·A=О; 4) 5) 6) 7) Для матриц A и B может быть введена операция умножения A·B при условии, что матрицы согласованы, т. е. количество столбцов матрицы A равно количеству строк матрицы B. Произведением матрицы Al× m на матрицу Bm× n называется матрица Свойства операции умножения матриц: 1) 2) 3) 4) В общем случае из существования AB не следует существование BA. Даже если оба эти произведения определены, они не всегда равны. Матрицы, для которых Пусть A – квадратная матрица. Тогда k-я степень ( Матрица AT, полученная из матрицы A заменой столбцов строками с теми же номерами, называется транспонированной к матрице A, то есть Свойства операции транспонирования матриц: 1) 2) 3) 4) Если для квадратной матрицы A выполняется соотношение Элементарными преобразованиями над строками матрицы A называют следующие операции: 1) перестановку строк; 2) умножение строки на ненулевое число; 3) прибавление к элементам строки соответствующих элементов другой строки, умноженных на ненулевое число. Говорят, что матрица A эквивалентна матрице B (пишут: A~B), если матрица B получена из A при помощи элементарных преобразований строк. 61. Системы линейных уравнений. Правило Крамера Система линейных алгебраических уравнений (или линейная система) имеет вид:
где aij и bj –заданные числа. Эту систему можно записать в матричной форме
где B – матрица-столбец свободных элементов bj, X – матрица-столбец неизвестных, т. е. такая, которая обращает матричное уравнение (2) в равенство (является решением этого уравнения). Система (1) называется совместной, если у нее существует хотя бы одно решение, в противном случае она называется несовместной. Две системы называются эквивалентными ( равносильными ), если множества их решений совпадают. Ответ на вопрос о совместимости системы дает теорема Кронера-Копелли: для того чтобы система (1) была совместной, необходимо и достаточно, чтобы
где Рассмотрим систему
или в матричном виде
где
Методы решения Метод обратной матрицы состоит в решении матричного уравнения Метод Крамера: для нахождения неизвестных необходимо использовать формулы
где
Формулы (4) называются формулами Крамера. Решение произвольной линейной системы (1) из m уравнений и n неизвестных начинается с нахождения ранга. Пусть
Если
Последняя система решается, например, методом Крамера.
Метод Гаусса
Для решения произвольных систем используют метод Гаусса. С помощью элементарных преобразований над строками расширенную матрицу системы (1) приводят к виду:
Соответствующая ей система, равносильная (1), примет вид:
Если хотя бы одно из чисел br + 1, … bm отлично от нуля, то система (6), а значит, и исходная система (1) несовместны. Если br + 1 = … = bm = 0, то система (6) позволяет получить явное выражение для базисных неизвестных x1, …, xr через свободные неизвестные xr + 1, …, xn. Если r = n, то свободные неизвестные отсутствуют, а значит, системы (6) и (1) имеют единственное решение. На практике обычно обходятся приведением матрицы системы (1) к треугольной или трапециевидной форме, после чего значения базисных переменных ищутся в обратном порядке. |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 413; Нарушение авторского права страницы
 (21)
(21) . (22)
. (22) называются фокусами эллипса, при этом величина 2c определяет междуфокусное расстояние.
называются фокусами эллипса, при этом величина 2c определяет междуфокусное расстояние.  – центр эллипса.
– центр эллипса. – фокальные радиусы эллипса (точка М принадлежит эллипсу), причем r1 = a + ε x, r2 = a – ε x;
– фокальные радиусы эллипса (точка М принадлежит эллипсу), причем r1 = a + ε x, r2 = a – ε x;  – директрисы эллипса.
– директрисы эллипса.  директрисы не пересекают границу и внутреннюю область эллипса, а также обладают свойством
директрисы не пересекают границу и внутреннюю область эллипса, а также обладают свойством 
 . (23)
. (23) – фокусы (рис. 13). При этом r1 + r2 = 2b, ε = c/b, директрисы определяются уравнениями
– фокусы (рис. 13). При этом r1 + r2 = 2b, ε = c/b, директрисы определяются уравнениями
 имеем (в виде частного случая эллипса) – окружность радиуса R = a. При этом с = 0, а значит, ε = 0.
имеем (в виде частного случая эллипса) – окружность радиуса R = a. При этом с = 0, а значит, ε = 0. где
где 

 находится в точке
находится в точке  , то его уравнение имеет вид
, то его уравнение имеет вид . (24)
. (24) (25)
(25) .
. называются фокусами гиперболы, при этом величина 2с (с > a > 0) определяет междуфокусное расстояние. Точки А1(–а, 0), А2(а, 0) называются вершинами гиперболы, при этом А1А2 = 2а образует действительную ось гиперболы, а В1В2 = 2b – мнимую ось (В1(0, –b), B2(0, b)), О – центр гиперболы.
называются фокусами гиперболы, при этом величина 2с (с > a > 0) определяет междуфокусное расстояние. Точки А1(–а, 0), А2(а, 0) называются вершинами гиперболы, при этом А1А2 = 2а образует действительную ось гиперболы, а В1В2 = 2b – мнимую ось (В1(0, –b), B2(0, b)), О – центр гиперболы. называется эксцентриситетом гиперболы, она характеризует меру «сжатости» гиперболы;
называется эксцентриситетом гиперболы, она характеризует меру «сжатости» гиперболы;  – фокальные радиусы гиперболы (точка М принадлежит гиперболе), причем r1 = a + ε x, r2 = –a + ε x для точек правой ветви гиперболы, r1 = – (a + ε x), r2 = – (–a + ε x) – для точек левой ветви;
– фокальные радиусы гиперболы (точка М принадлежит гиперболе), причем r1 = a + ε x, r2 = –a + ε x для точек правой ветви гиперболы, r1 = – (a + ε x), r2 = – (–a + ε x) – для точек левой ветви;  – директрисы гиперболы;
– директрисы гиперболы;  – уравнения асимптот.
– уравнения асимптот. 
 (26)
(26) .
. мнимая, фокусы лежат на оси
мнимая, фокусы лежат на оси  . Все остальные параметры определяются аналогично как для гиперболы (25).
. Все остальные параметры определяются аналогично как для гиперболы (25).

 где M(x, y) – произвольная точка параболы, называется фокальным радиусом, прямая D: x = –p/2 – директрисой (она не пересекает внутреннюю область параболы). Величина
где M(x, y) – произвольная точка параболы, называется фокальным радиусом, прямая D: x = –p/2 – директрисой (она не пересекает внутреннюю область параболы). Величина  называется эксцентриситетом параболы.
называется эксцентриситетом параболы.

 (22)
(22)













 приведение к каноническому виду осуществляется с помощью метода выделения полных квадратов.
приведение к каноническому виду осуществляется с помощью метода выделения полных квадратов. – пустое множество точек (мнимый эллипсоид);
– пустое множество точек (мнимый эллипсоид);  – точка (0, 0, 0);
– точка (0, 0, 0);  – пустое множество точек (мнимый эллиптический цилиндр);
– пустое множество точек (мнимый эллиптический цилиндр);  –прямая (ось Oz);
–прямая (ось Oz);  – пара пересекающихся плоскостей;
– пара пересекающихся плоскостей;  – пара параллельных плоскостей;
– пара параллельных плоскостей;  – пустое множество точек;
– пустое множество точек;  – плоскость (пара совпадающих плоскостей).
– плоскость (пара совпадающих плоскостей). (то есть состоящую из m строк и n столбцов чисел) в общем случае записывают в виде
(то есть состоящую из m строк и n столбцов чисел) в общем случае записывают в виде или в более компактной форме
или в более компактной форме  ,
, 
 .
. матрицу называют квадратной и обычно обозначают An. Элементы aii,
матрицу называют квадратной и обычно обозначают An. Элементы aii,  такой матрицы образуют ее главную диагональ.
такой матрицы образуют ее главную диагональ. , (1)
, (1)
 , называется диагональной. Если
, называется диагональной. Если  для любого
для любого  , то матрица (1) называется единичной и обозначается En.
, то матрица (1) называется единичной и обозначается En. или
или  соответственно.
соответственно. , где числа a11, a12, …, akk отличны от нуля.
, где числа a11, a12, …, akk отличны от нуля. и
и  (2)
(2) для всех
для всех  .
. , где
, где  .
. .
.





 A и B – матрицы одинакового размера.
A и B – матрицы одинакового размера. элементы которой
элементы которой 





 называются коммутативными.
называются коммутативными.  ) матрицы A определяется равенством
) матрицы A определяется равенством  . По определению принимают
. По определению принимают  при условии
при условии 




 то матрица A называется симметрической матрицей, а если
то матрица A называется симметрической матрицей, а если  – то кососимметрической.
– то кососимметрической.  (1)
(1) (2)
(2) – матрица системы состоящая из коэффициентов aij,
– матрица системы состоящая из коэффициентов aij, 


 – расширенная матрица системы (1), т.е. матрица свободных членов.
– расширенная матрица системы (1), т.е. матрица свободных членов. , имеющую вид:
, имеющую вид:  (3)
(3)

 (4)
(4)
 – определитель, получаемый из определителя
– определитель, получаемый из определителя  системы (3) заменой i-го столбца столбцом свободных членов.
системы (3) заменой i-го столбца столбцом свободных членов. и система (1) сведена к эквивалентной системе
и система (1) сведена к эквивалентной системе (5)
(5) то система (5) имеет единственное решение, которое можно получить указанными выше методами, если
то система (5) имеет единственное решение, которое можно получить указанными выше методами, если  то существует бесконечное множество решений. Для его получения неизвестные x1, x2, …, xr называют базисными, xr+1, xr+2, …, xn – свободными, система (5) записывается в виде:
то существует бесконечное множество решений. Для его получения неизвестные x1, x2, …, xr называют базисными, xr+1, xr+2, …, xn – свободными, система (5) записывается в виде: 

 (6)
(6)