|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механические характеристики, основные допускаемые
контактиые напряжения [sН]¢ и основные допускаемые напряжения изгиба [s0F]¢ и [s-1F]¢ для материалов червячных колес, МПа
Значения KFL при бронзовом венце червячного колеса определяют по формуле

где NS — суммарное число циклов перемен напряжений. Для передач машинного привода при числе циклов каждого зуба колеса меньшем, чем 106, следует принимать NS= 106; если окажется, что число циклов больше 25× 107, надлежит принимать NS= 25 • 107. Следовательно, значения KFL изменяются в пределах max KFL = 1, 0; min KFL = 0, 543. Для передач с чугунными червячными колесами, работающих длительное время, следует принимать KFL = 1, 0. При ручном приводе независимо от материала венца червячного колеса рекомендуется принимать KFL = 1, 5. Величину NSвычисляют по формуле
где n2 — частота вращения червячного колеса, об/мин; t — срок службы передачи, ч. Коэффициент долговечности при вычислении [sН] опреде ляют по формуле

При нереверсивной работе передачи значение NS вычисляют по формуле (4.29). В случае реверсивной нагрузки с одинаковым временем работы в обоих направлениях в формулу (4.30) следует подставлять значение NS вдвое меньшее, чем вычисленное по формуле (4.29). При числе циклов, превышающем 25 × 107, в формулу (4.30) следует подставлять NS = 25 × 107; следовательно, минимальное значение рассматриваемого коэффициента min КHL = 0, 67. Найденное по формуле (4.30) значение КHL не должно превышать своего максимального значения max КHL = 1, 15; если получится КHL > max КHL, то надо принимать КHL = 1, 15. Приведенные даные для определения коэффициентов KFL и КHL относятся к передачам, работающим с примерно постоянной нагрузкой; при переменной нагрузке следует исходить из эквивалентного числа циклов
4.9. Допускаемые контактные напряжения для червячных колес из условия стойкости против загдапия
Предельные допускаемые напряжения при пиковых нагрузках
где Тi, ti, ni — соответственно вращающий момент, продолжительность его действия и частота вращения при i-мрежиме; Тmax - наибольший длительно действующий момент; показатель степени х=9при определении KFL и х = 4 при определении KFL. Допускаемые контактные напряжения, если они установлены по условию сопротивления заеданию и зависят от скорости скольжения, выбирают по табл. 4.9. Табличные значения являются одновременно и расчетными, так как допускаемые напряжения не связаны с сопротивлением усталостному выкрашиванию и коэффициент долговечности в этом случае не должен учитываться. Предельные допускаемые напряжения, по которым ведется расчет при пиковых нагрузках, приведены в табл. 4.10.
ГЛАВА V ПЛАНЕТАРНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ ОБЩИЕ СВЕДЕНИЯ И КИНЕМАТИЧЕСКИЙ РАСЧЕТ
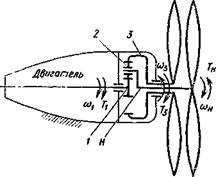
Планетарными называют передачи, колеса которых движутся подобно планетам солнечной системы (рис. 5.1): центральные колеса вращаются только вокруг своей оси (называемой центральной), а сателлиты 2, входящие в зацепление с центральными колесами, вращаются вокруг осей центральной и своей. Оси сателлитов закреплены на водиле, вращающемся относительно центральной оси. В передаче по рис. 5.1 колесо 3 закреплено в корпусе, колесо 1 — ведущее, ведомое звено — водило Н. В некоторых случаях неподвижным делают центральное колесо 1 (см. схему 2 табл. 5.1). Если неподвижным сделать водило, то оси сателлитов станут неподвижными и планетарная передача превратится в простую соосную передачу с паразитными колесами. Передача по рис. 5.2 имеет две степени свободы: она может иметь два ведущих звена и одно ведомое (рис. 5.3) или одно ведущее и два ведомых (рис. 5.4). Передачи по рис. 5.4 применяют для привода двух соосных ведомых звеньев, например винтов самолетов. На рис. 5.5 приведены кинематические схемы замкнутых дифференциалов с одной степенью свободы, в них простая зубчатая передача соединяет центральные колеса или одно из них с воднлом. Основная планетарная передача показана жирными линиями, замыкающая — тонкими.
Рис. 5.1. Кинематическая схема планетарной передачи с одной степенью свободы Рис. 5.2. Кинема гичсская схема планетарной дифференциальной нерелачи Рис. 5.3. Кинематическая схема планетарной дифференциальной передачи с двумя ведущими звеньями ( 1 и 4)
5.1. Кинематические схемы наиболее распространенных планетарных передач и их основные параметры
Рис. 5.4. Кинематическая схема планетарной дифференциальной передачи с двумя ведомыми звеньями ( 3 и Н)
Рис. 5.5. Кинематические схемы планетарных замкнутых дифференциальных передач. Замыкающая передача соединяет: а – колеса 1 и 3; б – колесо 3 и водило Н; в – колесо 1 и водило Н
В табл. 5.1 приведены кинематические схемы и формулы для определения основных параметров планетарных передач. Наиболее распространена передача, показанная на схеме 1. По сравнению с другими она имеет малые габариты, большую нагрузочную способность и высокий КПД. Передачу по схеме 2 применяют обычно в комбинации с передачами простой зубчатой и по схеме 1 в приводах повышенной надежности (см. рис. 5.3). Передачи по схеме 3 характеризуются большими передаточными отношениями, но имеют низкий КПД и малую нагрузочную способность (они однопоточные). Их применяют в приводах с малыми нагрузками или кратковременного включения. Передачи по схеме 4 применяют как дифференциальные (сведущим водилом и ведомыми центральными колесами 1 и 3) в ведущих мостах транспортных машин, в дифференциальных механизмах приборов (с ведущими центральными колесами 1 и 3, а водилом — ведомым) и как редукторную (с одной степенью свободы). Передачи по схеме 5 имеют диапазон передаточных отношений, как и передачи по схеме 3, но более высокий КПД и большую нагрузочную способность (благодаря многопоточности). Технологичеки сложны вследствие наличия блока сателлитов 2 - 2¢. Применяют в кинематических и силовых приводах. Все планетарные передачи в поперечном сечении круглые, поэтому их удобно стыковать с фланцевыми электродвигателями в одну сборочную единицу – мотор-редуктор. Планетарные мотор-редукторы делают в двух исполнениях: на лапах (рис. 5.6.) и на опорном фланце (рис. 5.7.). В приложении приведены параметры планатарных редукторов и мотор-редукторов общего применения.
Рис. 5.6. Чертеж мотор-редуктора в исполнении «на лапах»
Рис. 5.7. Чертеж мотора-редуктора в исполнении «на опорном фланце» Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 940; Нарушение авторского права страницы