|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОПРЕДЕЛЕНИЕ ЧИСЕЛ ЗУБЬЕВ КОЛЕС
Числа зубьев подбирают после выбора передаточною отношения и числа сателлитов в зависимости от кинематической схемы передачи и конструкции (редуктор или мотор-редуктор). Подбор чисел зубьев колес для схем 1, 2 и соответствующих им ступеней сложных передач, выполненных по схеме 5 (см. табл. 5.1.). Принимают число зубьев солнечного колеса z1 ³ 13 (во избежание подрезания ножек зубьев); числа зубьев сателлитов z2 определяют по формуле
округляя до ближайшего целого числа. Число зубьев корончатого колеса z3 определяют по формуле (5.2). По формулам табл. 5.1 уточняют передаточное отношение и сравнивают его с заданным. Допускается отклонение не более чем на 4% для одноступенчатых редукторов, 5% —для двухступенчатых. Далее проверяют выполнение условий вхождения зубьев в зацепление и соседства. Пример 1. Подобрать числа зубьев колес планетарного редуктора по рис. 5.1 с передаточным соотношением i(3)1H = 5, 6 и числом сателлитов nс = 3. 1.Выбираем число зубьев солнечного колеса z1 = 15. 2. Определяем число зубьев сателлитов по формуле (5.11)
Проверяем условие вхождения зубьев в зацепления по формуле (5.10)
Условие выполнено.
4. Проверяем выполнение условия соседства по формуле (5.9)
Условие выполнено. 5. Число зубьев корончатого колеса по формуле (5.2)
6. Уточняем передаточное отношение по формуле табл. 5.1
что соответствует заданному. Порядок подбора чисел зубьев передачи по схеме 1, выполненной как мотор-редуктор специального назначения (его параметры не регламентированы ГОСТ) имеет свои особенности, поясненные ниже численным примером. Пример 2. Подобрать числа зубьев колес мотор-редукгора специального назначения по схеме 1 (см. табл. 5.1) с передаточным отношением i(3)1H = 6, 3 и числом сателлитов пс = 3. Присоединяемый электродвигатель 4А112М2УЗ, наружный диаметр фланца D = 300 мм. 1. Определяем делительный диаметр d3, корончатого колеса Ряд делительных диаметров (в мм) по ГОСТ 25022-81 следующий: 100; 125; 160; 200; 250; 315; 400; 500; 630; 800; 1000. Принимаем ближайшее значение d3 = 250 мм. Соответственно т = 2 мм. 2. Определяем число зубьев корончатого колеса
3. Число зубьев солнечного колеса определяем на основании формулы
(см. табл. 5.1.), откуда
Принимаем z1 = 24. 4. Число зубьев сателлита — по формуле (5.2)
Принимаем z2 = 51, тогда z3 = z1 + 2z2 = 24 + 2 × 51 = 126. 5. Проверка условия вхождения зубьев в зацепление:
6. Проверка условия соседства
7. Уточняем передаточное отношение
8. Отклонение его от заданного
что допустимо (Di max = 4%). Окончательное значение чисел зубьев: z1 = 24; z2 = 51; z3 = 126; m = 2 мм; d3 = mz3 = 2 × 126 = 252 мм.
ГОСТ 250022-81 допускает отклонение значения делительного диаметра корончатого колеса 3 от номинального в пределах допускаемых отклонений передаточного отношения. Для предварительного выбора чисел зубьев колес планетарных передач по схемам 1 и 2 (см. табл. 5.1) удобно пользоваться табл. 5.2. 5.2. Таблица передаточных отношений и чисел зубьев колес для схемы рис. 5.1
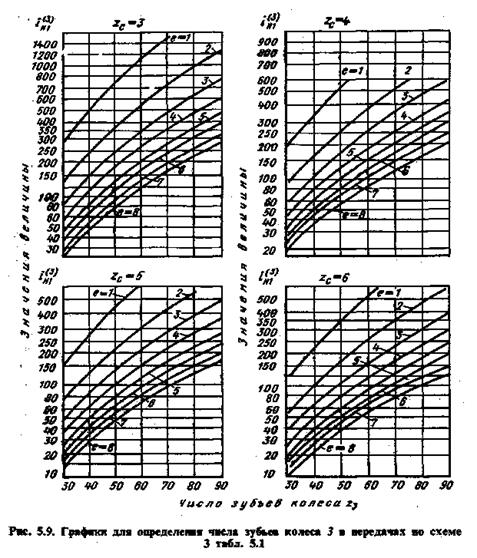
Подбор чисел зубьев колес передач по схеме 3 (см. табл. 5.1). Передача по схеме 3 — однопоточная, поэтому подбор чисел зубьев колес обусловливается только соосностью двух пар колес 1-2 и 2'-3, а также выполнением заданного передаточного отношения. Если модули зацеплений обеих пар колес равны и зубья нарезаны без смещения зуборезного инструмента, то условие соосности можно выразить через числа зубьев
Зависимость чисел зубьев от передаточного отношения
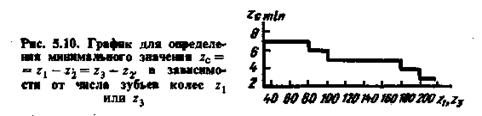
Решение этой системы уравнений дано на графиках (рис. 5.9), где по заданному передаточному отношению, задаваясь разностями чисел зубьев zc = z1 — z2 = z3 — z2¢ и е = z3 — z1 = z2¢ — z2, можно определить значение z3. По графику (рис. 5.10) можно определить минимальные значения zc, при которых не будет интерференции головок зубьев шестерни и колеса; если значение zc меньше указанного на графике, то для устранения интерференции колеса надо нарезать со смещением зуборезного инструмента или (когда zc ³ 3) применять зуборезный инструмент с углом профиля 30о и коэффициентом высоты головки зуба h*a = 0, 8. 1. Принимаем zc = z1 — z2 = z3 — z2¢ и е = z3 — z1 = z2¢ — z2 = 5. 2. По графику (рис. 5.9) находим z3 = 84. 3. Определяем
4. Фактическое передаточное отношение
5. Отклонение фактического передаточного отношения от заданного
РАСЧЕТ ЗУБЬЕВ ПЛАНЕТАРНЫХ ПЕРЕДАЧ НА ПРОЧНОСТЬ
В планетарных передачах, где сателлит входит в зацепления с двумя центральными колесами (солнечным и корончатым) и механические характеристики материала колес примерно одинаковы, рассчитывают на прочность только внешнее зацепление (солнечное колесо — сателлит). При определении числа циклов нагружения зубьев надо учитывать только относительную частоту вращения колес, т. е. при остановленном водиле. Для передач с вращающимся центральным колесом 1 и неподвижным п относительные частоты вращения колес определяют по формулам
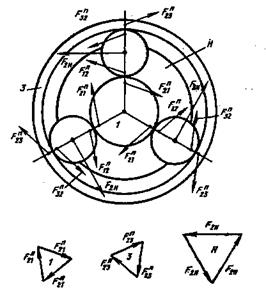
В табл. 5.1 для каждой передачи приведена формула для определения относительной частоты вращения сателлита, используемая при расчете долговечности ею подшипников. Порядок расчета зубьев планетарных передач на прочносгь зависит от задания на проектирование. При проектировании планетарной передачи как отдельной сборочной единицы расчет следует начинать с определения межосевого расстояния го условия контактной прочности. При проектировании мотор-редуктора диаметр передачи определяется диаметром корпуса присоединяемого электродвигателя, поэтому расчет удобно начинать с определения ширины колес из условий контактной и изгибной прочности. Окончательная ширина колес определится после подбора подшипников сателлитов. Формулы для расчета на прочность зубьев планетарных передач приведены в табл. 5.3. Величины сил и вращающих моментов, действующих на звенья планетарных передач, не зависят от числа степеней свободы. В передачах с одной степенью свободы вращающий момент, действующий на неподвижное центральное колесо, уравновешивается реакциями мест закрепления. В многопоточных передачах (рис. 5.11) в установившемся режиме работы силы в зацеплениях, действующие на центральные колеса и водило, уравновешивают друг друга, и поэтому валы нагружены только вращающим моментом. Силы зацеплений, действующие на сателлиты, приложены на диаметрально противоположных сторонах, поэтому их радиальные составляющие уравновешивают друг друга, а окружные складываются, так как
Рис. 5.11. Взаимное уравновешивание сил, действующих в многопоточных передачах 5.3. Формулы для расчета на прочность зубьев планетарных передач
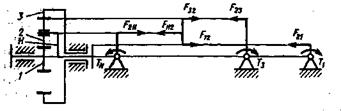
Рис. 5.12. Силовой расчет перадчи по схемам 1 и 2 таюл. 5.1. и рис. 5.1 – 5.4:
они параллельны и направлены в одну сторону; суммарная нагрузка действует на подшипники и оси сателлитов. При проведении силового расчета удобно пользоваться методом, представленным на рис. 5.12 и 5.13, где последовательно рассматривается равновесие каждого звена передачи. Начинать расчет следует со звена, на котором задан вращающий момент, по его значению и размерам колес находят уравновешивающую силу; затем на основании равенства действующей и противодействующей сил находят силу, действующую на звено, входящее в кинематическую пару. Далее рассматривают равновесие второго звена, находят уравновешивающую силу или момент и т. д., пока не будет рассмотрено равновесие всех звеньев передачи. Все силы обозначены буквой F с двумя нижними цифровыми индексами: первый указывает номер звена, со стороны которого действует сила, второй -
Рис. 5.13. Силовой расчет передачи по схеме 3 табл. 5.1:
— звено, на которое действует сила. Например, F12 — окружная сила, с которой колесо 1 действует на колесо 2. Проверкой правильности силового расчета служит уравнение равновесия внешних вращающих моментов, приложенных к передаче (в том числе и опорный момент). Пример. Для передач по рис. 5.1 — 5.4 определить окружные силы в зацеплениях, внешние вращающие моменты, действующие на центральные звенья, и силу, действующую на подшипник сателлита и его ось. Задан момент Тнполезного сопротивления, приложенный к водилу, размеры колес и число сателлитов пс. 1. Рассматриваем равновесие водила и находим силу F2н (см. рис. 5.12)
2. Рассматриваем равновесие сателлита, который входит в кинематические пары с водилом и центральными колесами 1 и 3, и находим силы F12 и F32
Условие равенства моментов сил относительно оси сателлита
3. Рассматриваем равновесие центрального колеса 3 и находим вращающий момент
Для передачи по рис. 5.2 момент Т3 — ведущий, для передачи по рис. 5.3 — полезного сопротивления, для передачи по рис. 5.1 — опорный. 4. Рассматриваем равновесие центрального колеса 1 и находим момент
Вращающий момент Т1, в рассматриваемом примере для передачи по рис. 5.1, 5.2, 5.3 - движущий (без учета потерь). С учетом потерь движущий момент Т¢ 1 = T1 / h, где h - КПД передачи (см. табл. 5.1). На рис. 5.13 приведен пример силового расчета передачи по схеме 3 для случая, когда задан вращающий момент (момент полезного сопротивления) на ведомом колесе 1.
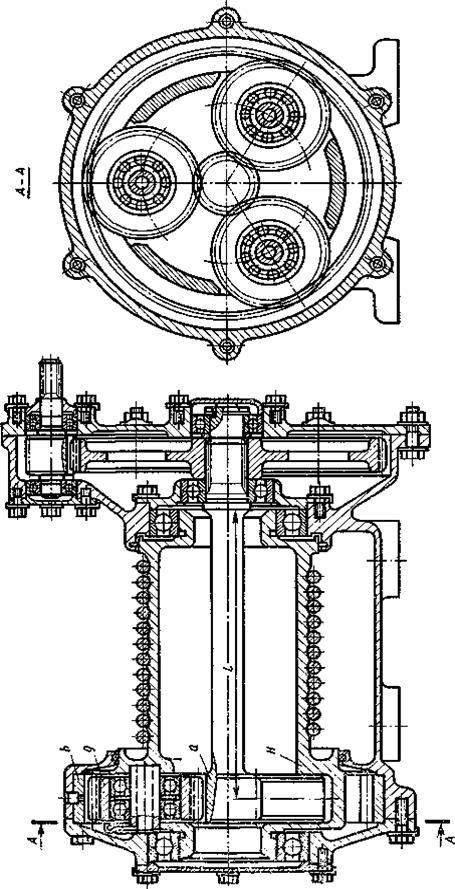
Рис. 5.14. Планетарный редуктор по схеме 1 табл. 5.1 с плавающим корончатым колесом
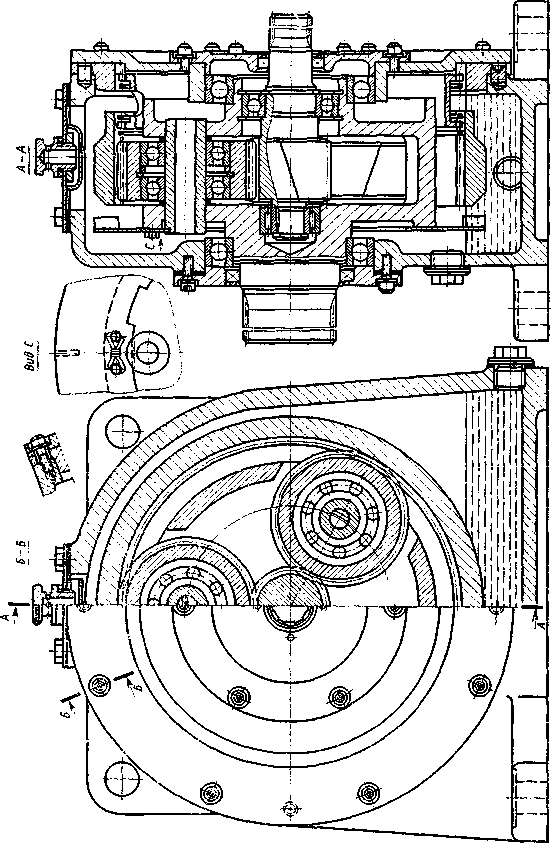
Рис. 5.15. Лебедка с планетарным редуктором по схеме 1 табл. 5.1. КОНСТРУКЦИИ ПЛАНЕТАРНЫХ ПЕРЕДАЧ
Конструкции планетарных передач зависят от выбранной кинематической схемы, величины передаваемого вращающего момента и срока службы. Для получения меньших габаритов силовые передачи выполняют многопоточными (обычно трехпоточными). Следует назначать нечетное число сателлитов для лучшего уравновешивания сил в зацеплениях. Конструкции центральных колес. Для равномерного распределения нагрузки между сателлитами силовых многопоточных передач одно или оба центральных колеса делают самоустанавливающимися (плавающими) (рис. 5.14). В передачах, имеющих большие габариты, плавающим делают оба центральных колеса: самоустановка достигается применением зубчатых муфт, соединяющих солнечные колеса с ведущим валом или водилом предыдущей ступени, а корончатые колеса с корпусом или замыкающей передачей. В конструкциях на рис. 5.15—5.17 самоустановка достигается применением гибких элементов. На рис. 5.15 солнечное колесо расположено консолыго па длинном гибком валу. На рис. 5.16 в конструкцию корончатого колеса включена гибкая оболочка. На рис. 5.17 сателлит установлен на гибкой оси. Для равномерного распределения нагрузки между сателлитами возможен и другой путь — жесткая установка всех деталей передачи при условии высокой точности их изготовления и монтажа (рис. 5.18). Жесткие корончатые колеса могут быть нарезаны непосредственно на корпусе, запрессованы в корпус или установлены в разъеме фланцев (рис. 5.19). Конструкции сателлитов. Сателлиты обычно делают с внутренней расточкой под подшипники качения. Для самоустановки применяют сферические подшипники. Максимальный диаметр наружного кольца подшипника
Dmax = т (z - 7), (5.23)
где т — модуль колеса передачи; z — число зубьев сателлита. Устанавливать сателлит на двух или трех подшипниках часто приходится для получения заданного срока службы передачи (рис. 5.20). При малых диаметрах сателлитов подшипники устанавливают в щеках водила (рис. 5.20, д)или применяют подшипники без колец. При невозможности обеспечить заданную долговечность подшипниками качения сателлиты устанавливают на подшипниках скольжения. Сателлиты с двумя венцами обычно делают сборными (рис. 5.21), что позволяет уменьшить массу заготовок и сократить время механической обработки. Сдвоенные сателлиты, устанавливаемые в одну передачу, должны иметь одинаковое относительное расположение зубьев венцов. Для этого их собирают в специальных приспособлениях или применяют конструкции, позволяющие устанавливать взаимное расположение венцов при сборке (рис. 5.22). Делать сдвоенные сателлиты одной деталью следует только в тех случаях, когда их диаметры мало отличаются друг от друга.
Рис. 5.16. Конструкция корончатого Рис. 5.17. Конструкция сателлита Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1531; Нарушение авторского права страницы












 Ширина колес
Ширина колес
 Проверочный расчет
Расчетное контактное напряжение
Проверочный расчет
Расчетное контактное напряжение
 Изгибная прочность
Проектировочный расчет
Ширина колес
Изгибная прочность
Проектировочный расчет
Ширина колес
 Модуль
Модуль
 Расчетное напряжение изгиба
Расчетное напряжение изгиба