Правило суммирования Эйнштейна.
Индекс  , по которому в формулах (19) и (21) производится суммирование, входит в одночлен, стоящий под знаком суммы, дважды. Это обстоятельство, с которым мы будем часто встречаться в дальнейшем, позволяет записать формулы преобразования еще более кратко. Знаки сумм в формулах (18) и (21) можно опустить, если условиться, что дважды повторяющийся в одночлене нижний латинский индекс будет всегда означать суммирование по значениям 1, 2, 3 этого индекса. Используя такую запись суммирования, формулы (19) и (21) можно представить в упрощенном виде:
, по которому в формулах (19) и (21) производится суммирование, входит в одночлен, стоящий под знаком суммы, дважды. Это обстоятельство, с которым мы будем часто встречаться в дальнейшем, позволяет записать формулы преобразования еще более кратко. Знаки сумм в формулах (18) и (21) можно опустить, если условиться, что дважды повторяющийся в одночлене нижний латинский индекс будет всегда означать суммирование по значениям 1, 2, 3 этого индекса. Используя такую запись суммирования, формулы (19) и (21) можно представить в упрощенном виде:
 (22а)
(22а)
 (22б)
(22б)
Как видно из формулы (22), двойной индекс после проведения суммирования исчезает, поэтому такой индекс называется немым индексом. Выбор той или иной буквы для обозначения этого индекса не существенен, если в данном одночлене не встречается другой индекс. Например, формулу (22а) можно записать в виде:
 (23)
(23)
В дальнейшем эта свобода выбора индекса будет часто использоваться. Во всех последующих формулах индексы будут подчиняться общему правилу: в корректно записанном соотношении нижний латинский индекс в каждом одночлене может встречаться не более двух раз. Если же обе стороны соотношения записываются как суммы одночленов и такой индекс встретится в одночлене один раз, то этот индекс войдет один раз и в любом другом одночлене. Преимущества этого способа записи можно увидеть на следующем примере:  . Пользуясь правилом суммирования Эйнштейна, это выражение можно записать в гораздо более компактном и удобном для восприятия виде:
. Пользуясь правилом суммирования Эйнштейна, это выражение можно записать в гораздо более компактном и удобном для восприятия виде:  . Здесь все четыре индекса
. Здесь все четыре индекса  , ,
, ,  ,
,  повторяются дважды и поэтому являются немыми; по каждому из них производится суммирование. В результате получается инвариантная физическая величина – единица.
повторяются дважды и поэтому являются немыми; по каждому из них производится суммирование. В результате получается инвариантная физическая величина – единица.
Еще один пример: выражение  в сокращенной записи будет выглядеть так:
в сокращенной записи будет выглядеть так:  . Здесь индексы , , – немые, а
. Здесь индексы , , – немые, а  ,
,  ,
,  – свободные.
– свободные.
§5. Преобразование координат точки и вектора.
Рассмотрим какую-либо точку пространства  с координатами в старой системе:
с координатами в старой системе:  . Разложим радиус-вектор этой точки
. Разложим радиус-вектор этой точки  по старому базису:
по старому базису:
 (24)
(24)
Перейдем в новую систему координат. Точка и ее радиус-вектор будут иметь уже новые координаты  , и разложение по новому базису будет выглядеть так:
, и разложение по новому базису будет выглядеть так:
 (25)
(25)
Подставим в формулу (24) формулы (20), выражающие старые базисные векторы через новые:
Пользуясь правилом Эйнштейна, запишем это короче:
 (26)
(26)
Сравнивая (26) с (25) и принимая во внимание, что разложение по базису единственно, получим, что координаты точки в новой системе координат равны:
 ,
,  ,
,  .
.
Эти формулы можно объединить в одну и тогда получим:
 (27)
(27)
По этому правилу преобразуются координаты точки и радиус-вектора при переходе от старой системы координат к новой. Выведем теперь формулы обратного преобразования. Подставим в формулу (25) формулу (22а). При этом сразу будем пользоваться правилом суммирования:
 (28)
(28)
Сравним (28) с (24). При этом, поскольку в (24) индекс  является немым, заменим его буквой
является немым, заменим его буквой  , а в (28) немой индекс заменим буквой
, а в (28) немой индекс заменим буквой  . Получаем:
. Получаем:
 (29)
(29)
По этой формуле преобразуются координаты точки и радиус-вектора при переходе от новой системы координат к старой.
По формулам (27) и (29) преобразуются координаты радиус-вектора. Поскольку все векторы мы считаем свободными, то по этим же формулам преобразуются координаты (компоненты) любого вектора. Укажем правило для запоминания суммирования в формулах преобразования (27) и (29). Первая формула (27) выражает новые координаты через старые, суммирование производится по старым координатам, а это второй индекс у элементов матрицы  . Следовательно, суммирование производится по второму индексу. Вторая формула (29) выражает старые координаты через новые. Суммирование производится по новым координатам, а это соответствует первому индексу у элементов . Следовательно, суммирование идет по первому индексу.
. Следовательно, суммирование производится по второму индексу. Вторая формула (29) выражает старые координаты через новые. Суммирование производится по новым координатам, а это соответствует первому индексу у элементов . Следовательно, суммирование идет по первому индексу.
Символ Кронекера.
Перепишем формулы (27) и (29):
 ,
,  (30)
(30)
и подставим вторую в первую:
 (31)
(31)
Распишем это подробно. Здесь двойное суммирование: по индексу и по индексу  :
:
 Отсюда:
Отсюда:
Следовательно:
 (32)
(32)
Первые три формулы можно сокращенно записать так:
 .
.
Следующие три формулы перепишем:

Объединяя эти две группы формул, можно записать:
 (33)
(33)
Введем так называемый символ Кронекера:
 (34)
(34)
С его помощью формулу (33) запишем в виде:
 (35)
(35)
Вернемся к формулам (30) и подставим теперь первую во вторую:
Если это выражение расписать подробно, как (32), то в итоге получим:
 (36)
(36)
Формулы (35) и (36) есть не что иное, как выражение свойств б) и в) ортогональной матрицы преобразования системы координат, сформулированные в § 3.
Переставим местами в формуле (35) индексы  и
и  :
:
 , (37)
, (37)
или  (38)
(38)
т.е. символ Кронекера симметричен.
Символ Кронекера обладает замечательным, так называемым фильтрующимсвойством, на котором и основано широкое применение этого символа. Рассмотрим выражение:  . Если
. Если  , то правая часть будет равна
, то правая часть будет равна  , если
, если  , то
, то  , если
, если  , то
, то  , т.е.:
, т.е.:
 . (39)
. (39)
Это соотношение означает, что из всех компонент вектора  символ Кронекера «отфильтровывает» одну, а именно
символ Кронекера «отфильтровывает» одну, а именно  .
.
Новое определение вектора.
Пусть имеется вектор  . Подобно тому, как точку с координатами
. Подобно тому, как точку с координатами  для краткости обозначают через
для краткости обозначают через  , вектор с компонентами
, вектор с компонентами  обозначим через
обозначим через  . При переходе к новой системе координат компоненты вектора преобразуются по формуле:
. При переходе к новой системе координат компоненты вектора преобразуются по формуле:
 (40)
(40)
Проиллюстрируем применение символа Кронекера для обращения формулы (40). Умножим обе части (40) на  :
:
 , т.е.
, т.е.
 (41)
(41)
При выводе (41) мы использовали формулы (36) и (39). Формулы (40) и (41) положены в основу нового определения вектора.
Определение. Вектор – это геометрический объект, который в любой прямоугольной системе координат определяется тремя числами – его компонентами, которые при преобразовании системы координат преобразуются по формулам (40) и (41).
Вектор существует независимо от системы координат, он инвариантен, а вот его координаты меняются при преобразованиях системы координат. Новое определение вектора сохраняет все известные из курса линейной алгебры операции с векторами:
1) Сложение векторов:
 (42)
(42)
2) Сложение ассоциативно, т.е.
 (43)
(43)
3) Умножение вектора на скаляр:
 (44)
(44)
4) Дистрибутивность умножения:
 (45)
(45)
Если компоненты вектора зависят от некоторого параметра  , то производные
, то производные  тоже образуют вектор
тоже образуют вектор  , который называется производной исходного вектора
, который называется производной исходного вектора  по
по  . Аналогично определяется и производная более высокого порядка вектора по скалярному параметру.
. Аналогично определяется и производная более высокого порядка вектора по скалярному параметру.
Рассмотрим скалярное произведение двух векторов  и
и  :
:
 (46)
(46)
Докажем, что скалярное произведение – скаляр и инвариантно относительно преобразования системы координат. В новой системе координат компоненты векторов обозначим  и
и  . Тогда скалярное произведение будет равно:
. Тогда скалярное произведение будет равно:
 (47)
(47)
Модуль вектора, определяемый скалярным произведением вектора самого на себя, запишется так:
 (48)
(48)
Записывать квадрат модуля в виде  нецелесообразно, т.к. при такой записи не ясно, что
нецелесообразно, т.к. при такой записи не ясно, что  представляет собой немой индекс. Вектор, модуль которого равен единице, называется, как известно, единичным вектором или ортом. Направление в пространстве обычно задается единичным вектором. Рассмотрим единичный вектор
представляет собой немой индекс. Вектор, модуль которого равен единице, называется, как известно, единичным вектором или ортом. Направление в пространстве обычно задается единичным вектором. Рассмотрим единичный вектор  . Скалярное произведение
. Скалярное произведение  определяет проекцию
определяет проекцию  на направление
на направление  :
:
 (49)
(49)
Поскольку компонентами единичного вектора являются направляющие косинусы  ,
,
или короче  , (50)
, (50)
то  (51)
(51)
Формула (51) линейна и однородна относительно направляющих косинусов. Она означает, что для любого направления в пространстве каждому вектору можно поставить в соответствие скаляр – проекцию вектора на это направление, посредством линейного и однородного относительно направляющих косинусов соотношения. Выясним, какой смысл имеют числа в (51). Совместим направление  с положительным направлением оси
с положительным направлением оси  . Тогда
. Тогда  , а
, а  и
и  , т.е.
, т.е.  – это проекция вектора
– это проекция вектора  на направление оси . Аналогично доказывается, что
на направление оси . Аналогично доказывается, что  и
и  – это проекции вектора на две другие оси. Следовательно, проекция вектора на произвольное направление определяется его проекциями на три фиксированных направления координатных осей.
– это проекции вектора на две другие оси. Следовательно, проекция вектора на произвольное направление определяется его проекциями на три фиксированных направления координатных осей.
Формула (51) будет играть в дальнейшем определяющую роль, поскольку она допускает далеко идущие обобщения.
§8. Задачи.
Задача 1. Старая система координат  преобразуется к новой системе
преобразуется к новой системе  , заданной следующими углами:
, заданной следующими углами:  ,
,  ,
,  ,
,  . Написать матрицу преобразования и проверить ее ортогональные свойства.
. Написать матрицу преобразования и проверить ее ортогональные свойства.
Решение. Имеем:
 ,
,  ,
,
 ,
,  ,
,
 ,
, 
 ,
,  ,
,
 .
.
Матрица преобразования будет иметь вид:
(52)
Ортогональность ее строк и столбцов проверяется непосредственно.
Задача 2. Пусть новая система координат получена из старой в результате вращения вокруг оси 
 на угол
на угол  против часовой стрелки. Написать матрицу преобразования.
против часовой стрелки. Написать матрицу преобразования.
Решение.
,

,
,

,
,
 ,
,
 ,
,  ,
,

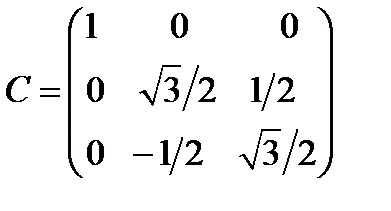
Тогда матрица преобразования имеет
u ngf3QSJrzR5BF1ZD3aD48JzApNP2K0YDtGaD3ZctsRwj+VaBtqqsKEIvx0VRXgTh2tOT9ekJURSg GuwxmqY3fur/rbFi04GnSc1KvwI9tiJq5YnVXsXQfjGo/VMR+vt0Ha2eHrTlDwAAAP//AwBQSwME FAAGAAgAAAAhAMVXEwPfAAAACgEAAA8AAABkcnMvZG93bnJldi54bWxMj9FOg0AQRd9N/IfNmPhi 6FIs1FKWRk00vrb2AxZ2CqTsLGG3hf6945M+Tu7JvWeK3Wx7ccXRd44ULBcxCKTamY4aBcfvj+gF hA+ajO4doYIbetiV93eFzo2baI/XQ2gEl5DPtYI2hCGX0tctWu0XbkDi7ORGqwOfYyPNqCcut71M 4jiTVnfEC60e8L3F+ny4WAWnr+kp3UzVZziu96vsTXfryt2UenyYX7cgAs7hD4ZffVaHkp0qdyHj Ra8gSlbpklkFzxkIBiLeS0BUCtJkA7Is5P8Xyh8AAAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+ AAAA4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAA ACEAOP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAA ACEACT2yL4gCAAAYBQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYA CAAAACEAxVcTA98AAAAKAQAADwAAAAAAAAAAAAAAAADiBAAAZHJzL2Rvd25yZXYueG1sUEsFBgAA AAAEAAQA8wAAAO4FAAAAAA== " stroked="f">
вид:
(53)
Задача 3. Исследовать влияние преобразования координат

на компоненты вектора.
Решение. Это преобразование координат называется
инверсией (отражением) относительно плоскости
. Первоначальная правая система координат
преобразуется в левую
. Матрица преобразования имеет вид:
(54)
Вектор преобразуется по формуле (40):
 (55)
(55)
или 


Таким образом, указанная инверсия изменяет только компоненту  , две другие компоненты при этом не меняются.
, две другие компоненты при этом не меняются.
Задача 4. Найти преобразование компонент вектора при вращении, описанном в задаче 2.
Решение. Используя матрицу преобразования (53) и формулу (55), получим:

 (56)
(56)

Задача 5.. Доказать равенство  (57)
(57)
Решение. Имеем:

Задача 6. Компоненты единичного вектора  являются непрерывно дифференцируемыми функциями параметра
являются непрерывно дифференцируемыми функциями параметра  . Показать, что вектор
. Показать, что вектор  перпендикулярен вектору .
перпендикулярен вектору .
Решение. Необходимо доказать, что скалярное произведение  . Имеем:
. Имеем:
Задача 7. Доказать, что каждый элемент ортогональной матрицы преобразования  равен своему алгебраическому дополнению, взятому со знаком плюс или минус.
равен своему алгебраическому дополнению, взятому со знаком плюс или минус.
Решение. Матрица перехода от старой системы координат к новой имеет вид (15). Ее определитель, как было показано в параграфе 3, равен  , где знак плюс берется в том случае, если старая и новая системы координат имеют одинаковую ориентацию (например, обе правые) и знак минус – в противном случае. По определению обратной матрицы имеем:
, где знак плюс берется в том случае, если старая и новая системы координат имеют одинаковую ориентацию (например, обе правые) и знак минус – в противном случае. По определению обратной матрицы имеем:
где  – алгебраическое дополнение элементов матрицы . С другой стороны, как было показано в параграфе 3, обратная матрица получается транспонированием прямой матрицы, т.е.
– алгебраическое дополнение элементов матрицы . С другой стороны, как было показано в параграфе 3, обратная матрица получается транспонированием прямой матрицы, т.е.  и имеет вид (17). Отсюда и получаем, что
и имеет вид (17). Отсюда и получаем, что  .
.
Подчеркнем еще раз, что знак плюс берется тогда, когда обе системы координат, старая и новая, имеют одинаковую ориентацию и знак минус – в противном случае.
Тензор второго ранга.
Вспомним задачу, приведшую нас в параграфе 1 к понятию тензора напряжений, и формулу (12). Сравним ее с формулой (51). Формула (51) любому направлению в пространстве  сопоставляет скаляр
сопоставляет скаляр  , который мы назвали проекцией вектора на направление
, который мы назвали проекцией вектора на направление  . Формула (12) идентична по структуре формуле (51), но с ее помощью любому направлению в пространстве сопоставляется не скаляр, а вектор тоже посредством линейного и однородного относительно направляющих косинусов соотношения. Из этого и будем исходить. Итак, пусть любому направлению в пространстве сопоставляется вектор
. Формула (12) идентична по структуре формуле (51), но с ее помощью любому направлению в пространстве сопоставляется не скаляр, а вектор тоже посредством линейного и однородного относительно направляющих косинусов соотношения. Из этого и будем исходить. Итак, пусть любому направлению в пространстве сопоставляется вектор  с помощью линейного и однородного относительно направляющих косинусов соотношения:
с помощью линейного и однородного относительно направляющих косинусов соотношения:
 (58)
(58)
Геометрический объект с таким свойством называется тензором второго ранга и обозначается  . Вектор называется проекцией тензора на направление или значением тензора в этом направлении. Выясним, какой смысл имеют векторы
. Вектор называется проекцией тензора на направление или значением тензора в этом направлении. Выясним, какой смысл имеют векторы  ,
,  ,
,  в формуле (58). Для этого совместим направление с направлением оси
в формуле (58). Для этого совместим направление с направлением оси  . Тогда
. Тогда  ,
,  ,
,  . Получаем, что проекция тензора на ось равна вектору
. Получаем, что проекция тензора на ось равна вектору  . Аналогично, совмещая направление с направлением осей
. Аналогично, совмещая направление с направлением осей  и
и  , получим, что векторы
, получим, что векторы  и
и  суть проекции тензора на оси и . Таким образом, в любой прямоугольной системе координат тензор задается тремя векторами , , – своими проекциями на базисные направления. Компоненты векторов , , в системе координат
суть проекции тензора на оси и . Таким образом, в любой прямоугольной системе координат тензор задается тремя векторами , , – своими проекциями на базисные направления. Компоненты векторов , , в системе координат  обозначим
обозначим  ,
,  ,
,  .
.
Девять величин  называются компонентами тензора в системе координат . Расположим их в виде матрицы:
называются компонентами тензора в системе координат . Расположим их в виде матрицы:
 , (59)
, (59)
которая называется матрицей тензора. Столбцы матрицы определяют три проекции тензора на координатные оси.
В другой системе координат  тензор также определяется тремя проекциями
тензор также определяется тремя проекциями  ,
,  ,
,  на новые координатные оси. Проекции тензора в новой и старой системах координат связаны друг с другом. Установим эту связь. Совместим в (58) направление
на новые координатные оси. Проекции тензора в новой и старой системах координат связаны друг с другом. Установим эту связь. Совместим в (58) направление  с направлением оси
с направлением оси  . Получим проекцию тензора на ось
. Получим проекцию тензора на ось  :
:
 (60)
(60)
Совместив с направлением оси  , получим
, получим
 , (61)
, (61)
и наконец:
 (62)
(62)
Стоящие в этих формулах косинусы – это элементы матрицы преобразования  . Поэтому можно переписать:
. Поэтому можно переписать:

 (63)
(63)
 .
.
Сокращенно это записывается так:
 ,
,  ,
,  (64)
(64)
или еще короче:  (65)
(65)
Видим, что закон преобразования проекций тензора такой же, как закон преобразования проекций вектора. Матрица тензора в новой системе координат состоит из компонент проекций тензора на эти новые оси. Первая проекция – вектор в новой системе имеет компоненты:  . Аналогично
. Аналогично  и
и  . Составленная из них матрица:
. Составленная из них матрица:
 (66)
(66)
называется матрицей тензора в новой системе координат. Таким образом, матрица тензора в старой системе состоит из компонент проекций тензора на старые оси, а в новой системе – из компонент проекций тензора на новые оси.
Установим связь между компонентами тензора в старой и новой системах координат. Обозначим компоненты векторов  в новом базисе через
в новом базисе через  , т.е.
, т.е.  . Компоненты векторов в новом базисе выразим через старые по формулам преобразования вектора:
. Компоненты векторов в новом базисе выразим через старые по формулам преобразования вектора:
 (67)
(67)
Тогда первое равенство (64) в новых координатах запишется так:
 (68)
(68)
Аналогично, две другие формулы (64) в новых координатах будут выглядеть так:

 (69)
(69)
Или объединяя все три формулы:
 (70)
(70)
По формуле (70) преобразуются компоненты тензора при переходе от старой системы координат к новой. Выведем обратную формулу. Умножим обе части (70) на  , воспользуемся ортогональностью матрицы перехода и свойством символа Кронекера:
, воспользуемся ортогональностью матрицы перехода и свойством символа Кронекера:
 (71)
(71)
Умножим теперь обе части на  :
: 
или  (72)
(72)
Формулы (70) и (72) определяют закон преобразования тензора второго ранга. Они положены в основу второго определения тензора. В любой прямоугольной системе координат тензор 2-го ранга определяется девятью компонентами, которые при преобразовании системы координат преобразуются по формулам (70) и (72).
Транспонированный тензор.
Исследуем влияние перестановки индексов  и
и  в формуле (70):
в формуле (70):  . Так как в правой части индексы
. Так как в правой части индексы  и
и  – немые, то их можно без изменения результата переставить:
– немые, то их можно без изменения результата переставить:
 . (73)
. (73)
То же самое сделаем в формуле (72), переставив индексы  и
и  :
:
 (74)
(74)
Из (73) и (74) видно, что если  – тензор, то и
– тензор, то и  – тоже тензор, поскольку преобразуется по тензорному закону. Он называется транспонированным тензором и обозначается
– тоже тензор, поскольку преобразуется по тензорному закону. Он называется транспонированным тензором и обозначается  . Матрица транспонированного тензора в любой системе координат транспонирована по отношению к матрице тензора
. Матрица транспонированного тензора в любой системе координат транспонирована по отношению к матрице тензора  .
.
Единичный тензор.
Рассмотрим символ Кронекера  и из его значений составим матрицу. Подвергнем ее тензорному преобразованию:
и из его значений составим матрицу. Подвергнем ее тензорному преобразованию:
 (75)
(75)
т.е. матрица не изменяется. Символ Кронекера образует так называемый единичный тензор 2-го ранга  . В любой координатной системе он изображается одной и той же единичной матрицей:
. В любой координатной системе он изображается одной и той же единичной матрицей:
 (76)
(76)
Популярное:
- Вот вам правило: в ущерб рабочему весу ищите позицию, которая обеспечивает самую
- Забегая вперед, я скажу, что, как правило, чуть больше, чем мы об этом думали, но чуть меньше того, что в действительности мы можем потратить на себя.
- Закон убывающей отдачи. Правило максимизации прибыли.
- Занятость - деятельность граждан, связанная с удовлетворением личных и общественных потребностей, не противоречащая законодательству и приносящая, как правило, им заработок, трудовой доход.
- Значение температуры для организмов. Правило Вант-Гоффа и его применимость к биохимическим реакциям.
- Золотое правило изменения привычек. Почему привычки меняются
- Кардинализм: общая и предельная полезность, правило максимизации общей полезности
- Краткое правило для благочестивой жизни о. Алексия Мечева
- Метод свободных ассоциаций — основное правило психоанализа
- Основы композиции во флористике. Закон пропорций, правило золотого сечения
- Ответственный руководитель работ назначается, как правило, при работах в электроустановках напряжением выше 1000 В.
- Очень важно соблюдать следующее правило: никогда нельзя уменьшать размер шрифта и, одновременно с этим увеличивать количество слов.











