|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Прочие ошибки магнитного компаса ⇐ ПредыдущаяСтр 8 из 8
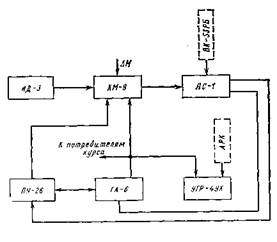
1. Северная поворотная ошибка — возникает в результате действия вертикальной составляющей силы земного магнетизма на магнитную систему компаса при кренах вертолета. 2. Увлечение картушки — возникает вследствие того, что лигроин дополнительно разворачивает картушку при выполнении виража из-за наличия сил трения. При длительных виражах увлечение картушки может достигнуть скорости виража. Увлечение картушки сильно искажает показания компаса, поэтому пользоваться КИ-13К во время виража весьма затруднительно. После окончания разворота картушка устанавливается в течение 20—30 с, причем необходимо брать средний отсчет. Предполетная подготовка компаса КИ-13К и пользование им в полете Перед полетом внешним осмотром проверить прибор (крепление, чистоту и уровень лигроина). Проверить наличие в кабине графика девиации. После выруливания на исполнительный старт, убедиться, что MK, снятый с КИ-13К и УГР-4УК, соответствует направлению оси ВПП с точностью ±2°. КИ-13К используется в горизонтальном полете для дублирования показаний курсовой системы ГМК-1А. Устойчивая работа компаса обеспечивается при кренах вертолета до 17°, поэтому виражи и развороты по КИ-13К выполнять с кренами не более 15°. При отсутствии визуальной видимости, при наборе высоты или снижении заданный курс полета должен выдерживаться по указателям курсовой системы ГМК-1А. Девиационные работы по компасам должны производиться: при возникновении у экипажа замечаний в правильности показаний курса; после установки нового компаса; после замены на вертолете двигателей, редуктора, других массивных деталей конструкции; не реже 1 раза в год (особенно при подготовке к ответственным заданиям и при перебазировании вертолета, связанном со значительным изменением широты. Выполнение девиационных работ производится штурманом звена (отряда) совместно с экипажем и специалистами по приборному оборудованию. Распределение внимания командира вертолета при полете по приборам должно быть примерно следующим: в наборе высоты: АГБ-ЗК—ВР-10, АГБ-ЗК-УГР-4УК, ВД-10, АГБ-ЗК—> УС-450 и далее в таком же порядке: в горизонтальном полете: АГБ-ЗК—> ВР-10, АГБ-ЗК—> УГР-4УК-ВД-10, АГБ-ЗК—УС-450 и далее в таком же порядке с периодическим контролем за режимом работы двигателей; при выполнении виражей и разворотов: АГБ-ЗК (силуэт «самолетика» — шарик)—> -ВР-10, АГБ-ЗК—> УС-450, АГБ-ЗК—> УГР-4УК—> ВР-10 и далее в таком же порядке; на планировании при заходе на посадку после 4-го разворота: АГБ-ЗК--УГР-4УК--ВР-10, АГБ-ЗК—УГР-4К--ВД-10--УС-450 и далее в таком же порядке. Курсовая система ГМК-1А Система ГМК-1А (рис. 30) служит для определения и указания магнитного или ортодромического курса вертолета и углов разворота вертолета. При совместной работе ГМК.-1А с радиокомпасом АРК-9 система служит для выдачи магнитных (или истинных) пеленгов и курсовых углов радиостанций.
При работе с автопилотом АП-34Б курсовая система выдает в канал направления сигналы, пропорциональные углу курса вертолета. Рис. 30. Блок-схема курсовой ГМК-1А Общие сведения ГМК-1А устанавливается со второго полугодия 1971 года вместо системы КС-ЗГ. В зависимости от решаемых задач и условий полета система может работать в одном из двух режимов: режиме магнитной коррекции (МК) или режиме гирополукомпаса (ГПК). Основным режимом работы является режим ГПК с периодической коррекцией показаний курса от магнитного корректора. Режим ГПК особенно важен при полетах в районах больших магнитных аномалий и в северных широтах, где горизонтальная составляющая магнитного поля Земли незначительна, а также при полетах с автопилотом и при работе с внешней подвеской. Кроме этого, режим ГПК предпочтительней при полетах на прямолинейном участке маршрута и по прямоугольному маршруту. Режим астрокоррекции на вертолете Ми-8 не используется (так как на вертолете не устанавливается астрокомпас). Кроме режимов ГПК и МК, электрическая схема курсовой системы обеспечивает работу системы во вспомогательных режимах: пуска; автоматического согласования; контроля; задачи курса. Основные технические данные Погрешности: а) погрешность выдачи сигналов МК не более ±1, 5° (без учета погрешностей самих указателей) б) погрешность от уходов гироскопа гироагрегата (в режиме ГПК) за 1 час работы...... не более ±2, 5° в) погрешность определения КУР и магнитных пелен Время готовности к работе, не более: а) в режиме МК 3 мин б) в режиме ГПК 5 мин Напряжение питания; а) по постоянному току 27 В± 10% б) по переменному току 36 В, 400 Гц Скорости согласования: а) нормальная скорость в режиме МК.... 1, 5—7 град/сек б) быстрая скорость в режиме МК не менее 6 град/с в) скорость отработки от курсозадатчика (ЗК) на пульте управления не менее 2 град/с Комплект ГМК-1А и размещение его на вертолете В комплект курсовой системы ГМК-1А входят: -индукционный датчик ИД-3 — установлен в хвостовой балке; -коррекционный механизм КМ-8 — установлен за сидением левого пилота; -автомат согласования АС-1 — установлен там же; -гироагрегат ГА-6 — установлен там же; -пульт управления ПУ-26 — установлен на правой боковой панели электропульта; - указатели УГР-4УК на приборных досках пилотов (2 штуки). Все элементы курсовой системы соединены в одну электрическую схему с помощью соединительной коробки, расположенной в кабине летчиков за сидением левого пилота. Принцип действия ГМК-1А Принцип действия основан на использовании совместной работы курсового гироскопа в ГА-6 с магнитным датчиком курса ИД-3. Основным датчиком курса в курсовой системе считается гироагрегат ГА-6, а магнитный датчик ИД-3 используется для коррекции курса по значению магнитного курса вертолета. Это сочетание позволяет устранить недостаток курсового гироскопа (неспособность определять магнитный курс вертолета) и недостаток магнитного датчика (нестабильность показаний). Режим магнитной коррекции В этом режиме сигнал по магнитному курсу вырабатывается индукционным датчиком ИД-3, а гироагрегат выполняет функции осреднения и стабилизации гигняля кургя, снятого с ИД-3 Датчик ИД-3 имеет чувствительный элемент, в сигнальных обмотках которого под действием горизонтальной составляющей магнитного поля Земли наводится ЭДС, величина которой зависит от положения продольной оси вертолета относительно магнитного меридиана магнитного поля Земли (т. е. от магнитного курса вертолета). Сигнал магнитного курса, выданный с индукционного датчика ИД-3 и скорректированный на величину четвертной девиации и инструментальных погрешностей на элементах следящих систем коррекционного механизма КМ-8, подается на сельсин-датчик ГА-6, который согласуется со средним значением сигнала магнитного курса. Этот осредненный сигнал магнитного курса поступает для отсчета на указатели УГР-4УК. В режиме МК на коррекционном механизме КМ-8 можно произвести ввод поправки на угол магнитного склонения магнитного поля Земли в пределах ±180°. В этом случае указатели УГР-4УК выдают значение истинного курса (ИК), а по шкале КМ-8 можно отсчитывать значение магнитного курса (без учета четвертной девиации). Режим гирополукомпаса ГПК В этом режиме датчиком курса является курсовой гироскоп гироагрегата, сельсин-датчик курса которого предварительно согласован со значением магнитного курса вертолета, определенным с помощью индукционного датчика. «Кажущийся» уход гироскопа в азимуте, зависящий от широты места нахождения вертолета, вызванный суточным вращением Земли и несбалансированностью гироскопа, компенсируется системой широтной коррекции. Ось внешней рамы гироскопа расположена вертикально. На оси жестко закреплен ротор сельсина-датчика курса, а статор сельсина-датчика закреплен на корпусе гироагрегата. Взаимное расположение ротора относительно статора однозначно определяет курс вертолета. При изменении курса ротор сельсина-датчика остается неподвижным, а статор поворачивается вместе с корпусом гироагрегата в новое положение. Следовательно, изменилось взаимное расположение ротора и статора, которое характеризует новый курс вертолета. Сигнал нового курса выдается сельсином-датчиком гироагрегата на указатели УГР-4УК и в канал направления автопилота при включенном канале. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1282; Нарушение авторского права страницы