|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Приборы контроля работы двигателяСтр 1 из 8Следующая ⇒
Семестр Лабораторная работа №5
Приборы контроля работы двигателя Вертолета МИ – 8
Цель работы
Изучение устройства и функционирование приборов контроля работы двигателя вертолета МИ – 8.
1.Порядок выполнения работы
1.Изучить работу системы электроснабжения переменного и постоянного тока по электрическим схемам. 2.Изучить состав электрооборудования входящих в системы переменного и постоянного тока. 3.Дать описание работы агрегатов систем переменного и постоянного тока. 4.Составить отчет по работе.
Приборы контроля работы двигателей, трансмиссии и систем вертолета Тахометр двигателей ИТЭ-2 Двухстрелочный индукционный электрический тахометр ИТЭ-2 предназначен для непрерывного дистанционного измерения частоты вращения двигателей, выраженных в % от максимальных оборотов. В комплект тахометра входят два датчика Д-2, установленных на коробках приводов двигателей, и два двухстрелочных указателя ИТЭ-2, расположенных на левой и правой приборных досках. Каждый из двух датчиков электрически соединен с обоими указателями. Принцип действия тахометра основан на преобразовании скорости вращения турбокомпрессора двигателя в трехфазную ЭДС частота которой пропорциональна оборотам турбокомпрессора. Датчик Д-2 представляет собой трехфазный генератор переменного тока, получает вращение от привода двигателя и вырабатывает переменный трехфазный ток с частотой, пропорциональной частоте вращения двигателя. Этот ток подается на синхронный электродвигатель указателя, на оси которого установлен магнитный узел тахометра, измеряющий скорость вращения якоря электродвигателя указателя. Таким образом, угол отклонения стрелки указателя будет соответствовать определенной частоте вращения турбокомпрессора авиадвигателя а = nтк Указатели ИТЭ-2 сдвоенные и состоят из двух измерительных узлов.
Шкала указателя отградуирована в пределах от 0 до 110%, оцифрована через 20%, цена деления 1%. 100% шкалы соответствует птк = 21200 об/мин. Погрешность тахометра на рабочем диапазоне (60—100%) составляет ±0, 5%. На установившихся режимах работы двигателя допустимая разница по частоте вращения двигателей не более 2%. При работе двигателей стрелки на указателях должны плавно, без рывков и колебаний, перемещаться по шкале указателя. Если при работе двигателей стрелка на указателях стоит на «0», причина — обрыв или короткое замыкание в соединительных проводах между датчиком и указателем. Возможные неисправности 1. При запуске двигателя стрелка указателя стоит на отметке «0». Причина — обрыв компенсационного провода от соединительной колодки до указателя. 2. При работе двигателей стрелка на указателе резко колеблется. Причина — неисправность указателя или плохой контакт проводов в местах соединения. Трехстрелочный индикатор ЭМИ-ЗРВИ Индикатор ЭМИ-ЗРВИ служит для дистанционного измерения: давления масла на входе в главный редуктор; температуры масла в промежуточном редукторе; температуры масла в хвостовом редукторе. Комплект ЭМИ-ЗРВИ
Таким образом, прибор имеет три самостоятельные системы измерения. Один манометр типа ДИМ и два термометра масла. Принцип работы манометра и термометров аналогичен прибору ЭМИ-ЗРИ. Прибор включается перед запуском двигателей, для чего следует включить источник постоянного тока; ПО-750; «Основной трансформатор ДИМ» на правой приборной доске. При включении питания стрелка на манометре должна установиться на «0», а стрелка термометров должна показать температуру масла в редукторах в зависимости от температуры наружного воздуха. ПРЕДУПРЕЖДЕНИЕ. Если стрелка манометра не устанавливается на «0», двигатель не запускать! ВНИМАНИЕ! При отказе любого из приборов КРД (тахометров, термометров, манометров), если при этом показания других приборов соответствуют рекомендованным значениям для данного' режима работы двигателей, разрешается выполнять дальнейший полет, усилив контроль за работой двигателей. Электрический термометр ТУЭ-48 Термометр ТУЭ-48 служит для замера температуры масла в главном редукторе. В комплект ТУЭ-48 входят: указатель ТУЭ-48, установленный на правой приборной доске;: приемник температуры П-1, установленный на главном редукторе. Принцип действия прибора основан на измерении величины сопротивления никелевой проволоки приемника П-1, которая изменяется при изменении температуры масла в ВР-8. Шкала указателя отградуирована от —70 до +150°С, оцифровка через 50° С, цена деления 10° С. Прибор питается постоянным током напряжением 27В±10%. Включается перед запуском АЗС «Индикаторы редукторов».
Лабораторная работа №6
Пилотажно – навигационное оборудование Вертолета МИ – 8
Цель работы
Изучение устройства и функционирование пилотажно – навигационное оборудование вертолета МИ – 8.
1.Порядок выполнения работы
1.Изучить работу системы электроснабжения переменного и постоянного тока по электрическим схемам. 2.Изучить состав электрооборудования входящих в системы переменного и постоянного тока. 3.Дать описание работы агрегатов систем переменного и постоянного тока. 4.Составить отчет по работе.
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ ПРИБОРЫ И АВТОПИЛОТ Общие сведения Вертолет Ми-8 оборудован полным комплектом пилотажно-на- вигационных приборов, приборов контроля работы двигателей, трансмиссии, систем вертолета, позволяющих выполнять пилотирование и решать задачи навигации при полете вертолета днем, ночью и в сложных метеорологических условиях. К приборному оборудованию вертолета предъявляются следующие требования: -высокая надежность и точность работы в течение установленного ресурсом срока; -высокая механическая, электрическая, термическая стойкость; -минимальная масса и габариты; -удобство эксплуатации; -минимальное время готовности к работе; -отсутствие помех на работу бортового радиооборудования и других систем вертолета (рис. 15; рис. 16). Вариометр ВР-10К Вариометр предназначен для измерения вертикальной составляющей скорости подъема и спуска вертолета, а также для осуществления горизонтального полета (рис. 22). Принцип работы прибора основан на измерении разности давлений внутри манометрической коробки и в корпусе прибора. Манометрическая коробка через трубопровод соединена со статической камерой ПВД, а корпус через капилляр соединен с приемной камерой вариометра. Диаметр капилляра 0, 4 мм. В горизонтальном полете давление внутри корпуса прибора равняется атмосферному. При этом разность давлений между корпусом и манометрической коробкой равна «0» и стрелка стоит на «0» шкалы. При подъеме вертолета атмосферное давление уменьшается, следовательно, давление в корпусе превышает давление внутри манометрической коробки. Под влиянием образовавшегося перепада коробка сжимается и через передающий механизм передвигает стрелку по шкале вверх от «О». Чем больше скорость подъема или спуска, тем больше будет перепад давлений. Шкала отградуирована от 0 до 10 м/с на «спуск» и «подъем». Оцифровка шкалы на отметках «0», «2», «5», «10».
Рис. 22. Принцип действия ВР-10 Пользование вариометром Перед полетом внешним осмотром проверить прибор. Допустимое смещение стрелки от 0 перед взлетом должно быть не более 0, 3 малого деления. Если смещение будет больше допустимого, необходимо котировочным винтом установить стрелку на нулевую отметку шкалы. Погрешность прибора ± 1 м/с. Вариометру присущи некоторые запаздывания в показаниях (2—3 с) при переходе вертолета в горизонтальный полет. С увеличением высоты полета прибор дает заниженные показания. Эта ошибка незначительна и летчиком не учитывается. Гироскопические приборы Гироскоп — это быстро вращающееся массивное симметричное тело, подвешенное в кардановом подвесе. Быстро вращающаяся часть гироскопа называется ротором. Ось
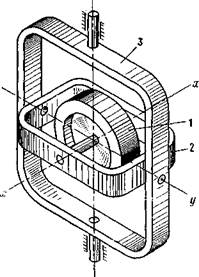
Рис. 23. Гироскоп с тремя степенями свободы: 1—ротор; 2—внутренняя рамка; 3—внешняя рамка
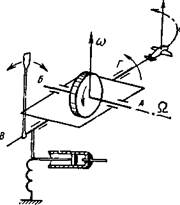
Ротор установлен во внутренней рамке, которая имеет свою ось вращения. Ось внутренней рамки установлена во внешней рамке, которая имеет возможность поворачиваться вокруг своей оси. Устройство из внутренней и внешней рамок, в котором помещен ротор гироскопа, называется кардановым подвесом. Карданов подвес обеспечивает возможность вращения ротора гироскопа относительно трех взаимно перпендикулярных осей. Способность ротора гироскопа поворачиваться относительно пространственной оси (х, у, z) называется степенью свободы гироскопа. В авиационных гироскопических приборах используют гироскопы с двумя и с тремя степенями свободы (рис. 23). Основные свойства гироскопа 1.Устойчивость положения главной оси гироскопа до тех пор, пока на быстро вращающийся гироскоп не действует внешняя сила. Это основное свойство гироскопа. 2.Прецессия или прецессионное движение. Это отклонение главной оси гироскопа от своего первоначального положения под действием внешней силы. Направление прецессии всегда перпендикулярно действию внешней силы. 3.Безынерционность движения гироскопа. Это отсутствие реакции на отклонение главной оси гироскопа от своего первоначального положения под действием кратковременных внешних воздействий (толчков, ударов, вибрации и т. д.) Устойчивость гироскопа обеспечивает точность работы гироскопических приборов. Устойчивость достигается точной балансировкой гироскопа, т. е. совпадением центра тяжести гироскопа и точки пересечения его осей вращения, а также большой скоростью вращения ротора гироскопа. Благодаря этим свойствам гироскопы с тремя степенями свободы широко применяются в авиагоризонтах, центральных гировертикалях, автопилотах, гиро-полукомпасах, гиромагнитных компасах. Указатель поворота ЭУП-53 Указатель поворота предназначен для определения и указания направления разворота и скольжения вертолета. ЭУП-53 установлен на левой приборной доске.
Рис. 24. Принцип действия указа теля поворота (ЭУП-53) Принцип действия ЭУП-53 (рис.24) основан на использовании свойства гироскопа с двумя степенями свободы совмещать ось собственного вращения с осью вынужденного вращения при возникновении угловой скорости относительно вертикальной оси. ЭУП-53 — комбинированный прибор, сочетающий в себе указатель поворота и указатель скольжения. Чувствительным элементом указателя поворота является гироскоп с двумя степенями свободы» главная ось которого расположена горизонтально по поперечной оси вертолета. В качестве гироскопа используется ротор гиромотора, который представляет собой электродвигатель постоянного тока. Питание прибора от источника напряжением 27 В ±10%, частота вращения ротора гироскопа 6000 об/мин. Указатель скольжения — стеклянный шарик черного цвета, помещенный в изогнутую стеклянную трубку, заполненную жидкостью (толуолом). Принцип работы основан на использовании свойств маятника. Включение и пользование ЭУП-53 ЭУП включается перед взлетом, для этого на левой панели АЗС включить АЗС «Указатель поворота». Перед полетом внешним осмотром проверить прибор, после включения проверить работоспособность прибора. Для этого необходимо поочередно нажать рукой на края приборной доски. При этом стрелка на приборе должна отклоняться в соответствующую сторону. В полете необходимо одновременно пользоваться показаниями указателя поворота и указателя скольжения. ЭУП-53 позволяет точно выполнять координированные развороты, горизонтальный полет; при отказе авиагоризонтов совместно с указателями скорости, магнитного курса, вариометром, высотомером
7 8 9 Рис. 25. Показания ЭУП-53: 1—прямолинейный полет со скольжением влево; 2—прямолинейный полет без скольжения; 3—прямолинейный полет со скольжением вправо; 4—левый вираж с внутренним скольжением; 5—левый вираж правильный; 6—левый вираж с внешним скольжением; 7—правый вираж с внешним скольжением; 8—правый вираж правильный; 9—правый вираж с внутренним скольжением На рис. 25 приведены примеры совместных показаний указателя поворота и указателя скольжения для различных случаев полета вертолета. При отказе авиагоризонтов и пилотировании по дублирующим приборам рекомендуется следующее распределение внимания летчика: ЭУП-53—УГР-4УК—ЭУП-53-УС-450 ВД-10 (см. РЛЭ). Авиагоризонт АГБ-ЗК Авиагоризонт АГБ-ЗК предназначен для: 1)определения и показания пространственного положения вертолета относительно плоскости истинного горизонта; 2)выдачи электрических сигналов, пропорциональных углам крена и тангажа, в каналы крена и тангажа автопилота АП-34Б (от левого АГБ-ЗК); в систему САРПП-12ДМ сигналы крена и тангажа поступают от правого АГБ-ЗК; 3)определения и указания скольжения вертолета. АГБ-ЗК установлены на левой и правой приборной доске летчиков. Основные технические данные Диапазон измерения углов тангажа ± 3600 Диапазон измерения углов крена ± 800 Время готовности прибора к работе не менее 3 мин после включения Погрешность измерения крена и тангажа ± 10 на участке шкалы от 0 до 30° Питание прибора: трехфазным током, напряжением 36 В, частотой 400 Гц постоянным током, напряжением 27 В±10% Принцип действия авиагоризонта основан на использовании свойства гироскопа с тремя степенями свободы сохранять неизменным положение главной оси (вертикальное) независимо от изменения положения вертолета. Основными узлами прибора являются гирогоризонт, коррекционный механизм, СД крена и тангажа, указатель скольжения, отсчетное устройство. При работе авиагоризонта возникают «уходы» главной оси от исходного (вертикального) положения в результате разбаланса гироузла и наличия трения в подшипниках осей гироузла. Для поддержания главной оси гироскопа в вертикальном положении АГБ-ЗК имеет коррекционное устройство, чувствительным элементом которого является жидкостный маятниковый переключатель, а исполнительными элементами — электрические коррекционные моторы (продольный и поперечный). При действии длительных односторонних ускорений (набор высоты, торможение, вираж) в авиагоризонтах накапливается ошибка в показаниях, для уменьшения которой предусмотрено отключение поперечной коррекции положения главной оси по сигналам, поступающим от выключателя коррекции ВК-53РВ. Крены вертолета фиксируются поворотом «силуэта-самолетика» относительно линии искусственного горизонта, определяется направление крена. Отсчет угла крена производится по неподвижной шкале крена на лицевой части прибора, причем стрелкой служит «силуэт-самолетик». Углы тангажа определяются по положению центра «силуэта-самолетика» относительно подвижной шкалы тангажа ленточного типа. Линия искусственного горизонта (белая) разделяет шкалу тангажа на две части: светло-серый фон шкалы (небо); черный фон шкалы (земля). В авиагоризонте применена сигнализация отказа питания, если в приборе отсутствует постоянный и переменный ток, а также при обрывах в электрических цепях. В случаях, если прибор не включен, при отсутствии питания или обрывах в электрических цепях на лицевой части прибора появляется красно-белый сигнальный флажок. На лицевой части прибора имеется ручка кремальеры, которая служит для перемещения шкалы тангажа относительно центра «силуэта-самолетика» в пределах ±10° при продолжительных полетах с постоянным углом тангажа. Авиационные компасы Понятие о земном магнетизме Земной шар представляет собой постоянный магнит больших размеров, вокруг которого действует магнитное поле Земли.
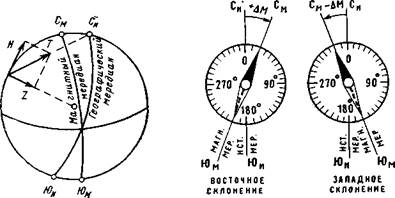
Рис. 26. Силы земного магнетизма Рис. 27. Магнитное склонение
Состояние магнитного поля Земли характеризуется тремя основными параметрами: склонением, наклонением и напряженностью. В каждой точке Земли действует полная сила земного магнетизма (Т), направленная под углом к горизонту (рис. 26). Сила Т может быть разложена на две составляющие: горизонтальную силу (Н) и вертикальную силу (Z). Горизонтальная составляющая магнитного поля Земли устанавливает магнитную стрелку в направлении С—Ю. Величина горизонтальной составляющей непостоянна и меняется от максимального значения на экваторе до нуля на полюсах.
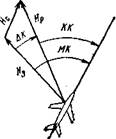
Рис. 28. Курсы вертолета
Магнитные меридианы проходят через магнитные полюса, они не совпадают с географическими меридианами и расположены по отношению к ним под некоторыми углами. Магнитное склонение — угол, заключенный между магнитным и географическим меридианами, измеряется в пределах от 0 до 180° и обозначается ∆ М (рис. 27). AM бывает восточным и западным. Угол, который образует магнитная стрелка с горизонтальной плоскостью, называется углом магнитного наклонения, на полюсах он равен 90°. Явление земного магнетизма используется в авиационных магнитных компасах, которые позволяют определять магнитный курс полета вертолета (рис. 28). Магнитный компас КИ-13К Магнитный жидкостный авиационный компас предназначен для измерения и выдерживания компасного курса вертолета; является дублирующим прибором и используется совместно с курсовой системой ГМК-1А и при ее отказе КИ-13К установлен на каркасе фонаря кабины летчиков по продольной оси вертолета. Принцип действия КИ-13К основан на использовании свойства свободно подвешенной системы магнитов устанавливаться в плоскости магнитного меридиана. Компас имеет чувствительный элемент, состоящий из двух постоянных магнитов, которые закреплены в картушке. Шкала картушки равномерная в пределах от 0 до 360°, оцифровка через 30°, цена деления 50. Для демпфирования колебаний картушки и уменьшения трения при повороте картушки стеклянный корпус прибора заполнен лигроином. В нижней части корпуса имеется девиационное устройство для устранения полукруговой девиации. Компас имеет индивидуальный подсвет шкалы. Ошибки магнитного компаса Девиация — основная методическая ошибка магнитного компаса. Собственное магнитное поле вертолета вызывает отклонение картушки компаса от магнитного меридиана на некоторый угол α. Этот угол отклонения картушки называется девиацией. Девиация компаса измеряется в градусах и условно обозначается ∆ К (рис.29). В результате девиации магнитный компас измеряет компасный курс (КК), который отличается от магнитного на величину девиации: ∆ К = МК—КК. Магнитное поле вертолета, вызывающее ∆ К, создается ферромагнитными деталями конструкции вертолета и работой электро-радиооборудования. Ферромагнитные детали вертолета образуют «вертолетное железо», которое по магнитным свойствам условно делится на две группы: твердое железо; мягкое железо.
Полукруговая девиация при развороте вертолета на 360° два раза меняет свой знак и два раза приходит к нулю, изменение происходит по синусоидальному закону.
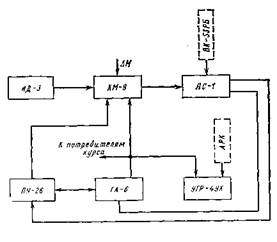
Рис. 29. Девиация магнитного компаса Мягкое железо намагничивается пропорционально напряженности магнитного поля, и его магнетизм непостоянен. Мягкое железо образует четвертную девиацию, которая при развороте на 360° четыре раза меняет свой знак. Четвертная девиация для компаса КИ-13К не устраняется, а в составе остаточной девиации списывается на график поправок, который устанавливается в кабине экипажа и используется летчиком для учета поправки при отсчете магнитного курса вертолета по КИ-13К. Постоянная девиация (установочная ошибка) компенсируется поворотом компаса в месте крепления. Она определяется алгебраическим сложением остаточной девиации на румбах 0°, 90°, 180°, 270° и делением полученной суммы на четыре. Компенсирование постоянной девиации производится в том случае, если ∆ Куст будет больше ±2°. Допустимая установочная ошибка ∆ К ±1°. Курсовая система ГМК-1А Система ГМК-1А (рис. 30) служит для определения и указания магнитного или ортодромического курса вертолета и углов разворота вертолета. При совместной работе ГМК.-1А с радиокомпасом АРК-9 система служит для выдачи магнитных (или истинных) пеленгов и курсовых углов радиостанций.
При работе с автопилотом АП-34Б курсовая система выдает в канал направления сигналы, пропорциональные углу курса вертолета. Рис. 30. Блок-схема курсовой ГМК-1А Общие сведения ГМК-1А устанавливается со второго полугодия 1971 года вместо системы КС-ЗГ. В зависимости от решаемых задач и условий полета система может работать в одном из двух режимов: режиме магнитной коррекции (МК) или режиме гирополукомпаса (ГПК). Основным режимом работы является режим ГПК с периодической коррекцией показаний курса от магнитного корректора. Режим ГПК особенно важен при полетах в районах больших магнитных аномалий и в северных широтах, где горизонтальная составляющая магнитного поля Земли незначительна, а также при полетах с автопилотом и при работе с внешней подвеской. Кроме этого, режим ГПК предпочтительней при полетах на прямолинейном участке маршрута и по прямоугольному маршруту. Режим астрокоррекции на вертолете Ми-8 не используется (так как на вертолете не устанавливается астрокомпас). Кроме режимов ГПК и МК, электрическая схема курсовой системы обеспечивает работу системы во вспомогательных режимах: пуска; автоматического согласования; контроля; задачи курса. Основные технические данные Погрешности: а) погрешность выдачи сигналов МК не более ±1, 5° (без учета погрешностей самих указателей) б) погрешность от уходов гироскопа гироагрегата (в режиме ГПК) за 1 час работы...... не более ±2, 5° в) погрешность определения КУР и магнитных пелен Время готовности к работе, не более: а) в режиме МК 3 мин б) в режиме ГПК 5 мин Напряжение питания; а) по постоянному току 27 В± 10% б) по переменному току 36 В, 400 Гц Скорости согласования: а) нормальная скорость в режиме МК.... 1, 5—7 град/сек б) быстрая скорость в режиме МК не менее 6 град/с в) скорость отработки от курсозадатчика (ЗК) на пульте управления не менее 2 град/с Принцип действия ГМК-1А Принцип действия основан на использовании совместной работы курсового гироскопа в ГА-6 с магнитным датчиком курса ИД-3. Основным датчиком курса в курсовой системе считается гироагрегат ГА-6, а магнитный датчик ИД-3 используется для коррекции курса по значению магнитного курса вертолета. Это сочетание позволяет устранить недостаток курсового гироскопа (неспособность определять магнитный курс вертолета) и недостаток магнитного датчика (нестабильность показаний). Режим магнитной коррекции В этом режиме сигнал по магнитному курсу вырабатывается индукционным датчиком ИД-3, а гироагрегат выполняет функции осреднения и стабилизации гигняля кургя, снятого с ИД-3 Датчик ИД-3 имеет чувствительный элемент, в сигнальных обмотках которого под действием горизонтальной составляющей магнитного поля Земли наводится ЭДС, величина которой зависит от положения продольной оси вертолета относительно магнитного меридиана магнитного поля Земли (т. е. от магнитного курса вертолета). Сигнал магнитного курса, выданный с индукционного датчика ИД-3 и скорректированный на величину четвертной девиации и инструментальных погрешностей на элементах следящих систем коррекционного механизма КМ-8, подается на сельсин-датчик ГА-6, который согласуется со средним значением сигнала магнитного курса. Этот осредненный сигнал магнитного курса поступает для отсчета на указатели УГР-4УК. В режиме МК на коррекционном механизме КМ-8 можно произвести ввод поправки на угол магнитного склонения магнитного поля Земли в пределах ±180°. В этом случае указатели УГР-4УК выдают значение истинного курса (ИК), а по шкале КМ-8 можно отсчитывать значение магнитного курса (без учета четвертной девиации). Режим гирополукомпаса ГПК В этом режиме датчиком курса является курсовой гироскоп гироагрегата, сельсин-датчик курса которого предварительно согласован со значением магнитного курса вертолета, определенным с помощью индукционного датчика. «Кажущийся» уход гироскопа в азимуте, зависящий от широты места нахождения вертолета, вызванный суточным вращением Земли и несбалансированностью гироскопа, компенсируется системой широтной коррекции. Ось внешней рамы гироскопа расположена вертикально. На оси жестко закреплен ротор сельсина-датчика курса, а статор сельсина-датчика закреплен на корпусе гироагрегата. Взаимное расположение ротора относительно статора однозначно определяет курс вертолета. При изменении курса ротор сельсина-датчика остается неподвижным, а статор поворачивается вместе с корпусом гироагрегата в новое положение. Следовательно, изменилось взаимное расположение ротора и статора, которое характеризует новый курс вертолета. Сигнал нового курса выдается сельсином-датчиком гироагрегата на указатели УГР-4УК и в канал направления автопилота при включенном канале. Семестр Лабораторная работа №5
Приборы контроля работы двигателя Вертолета МИ – 8
Цель работы
Изучение устройства и функционирование приборов контроля работы двигателя вертолета МИ – 8.
1.Порядок выполнения работы
1.Изучить работу системы электроснабжения переменного и постоянного тока по электрическим схемам. 2.Изучить состав электрооборудования входящих в системы переменного и постоянного тока. 3.Дать описание работы агрегатов систем переменного и постоянного тока. 4.Составить отчет по работе.
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 5232; Нарушение авторского права страницы
 Стрелки указателя оцифрованы для левого двигателя «1» и для правого двигателя «2».
Стрелки указателя оцифрованы для левого двигателя «1» и для правого двигателя «2».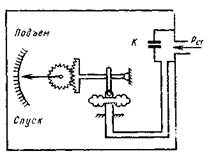
 ром является дублирующим прибором для контроля положения вертолета в полете (особенно на прямой). Вследствие высокой чувствительности гироскопа ЭУП к угловой скорости стрелка будет колебаться, поэтому показания следует снимать осредненные. При разворотах вертолета на скорости 160— 200 км/ч с кренами 10, 15° показания ЭУП будут соответственно равны примерно 25 и 45°.
ром является дублирующим прибором для контроля положения вертолета в полете (особенно на прямой). Вследствие высокой чувствительности гироскопа ЭУП к угловой скорости стрелка будет колебаться, поэтому показания следует снимать осредненные. При разворотах вертолета на скорости 160— 200 км/ч с кренами 10, 15° показания ЭУП будут соответственно равны примерно 25 и 45°.
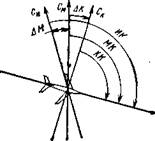
 Твердое железо, будучи намагничено, длительное время сохраняет свой магнетизм. Твердое железо создает полукруговую девиацию, которая устраняется девиационным устройством компаса КИ-13К на четырех основных румбах 0°, 90°, 180э, 270°.
Твердое железо, будучи намагничено, длительное время сохраняет свой магнетизм. Твердое железо создает полукруговую девиацию, которая устраняется девиационным устройством компаса КИ-13К на четырех основных румбах 0°, 90°, 180э, 270°.