|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Метод логарифмирования функции
Запишем относительную погрешность величины А:
С помощью формулы (12) она примет вид:
Учитывая, что
После расчета относительной погрешности (в частях, а не в процентах) находится и абсолютная погрешность:
Данный метод применяется, если расчетная формула удобна для логарифмирования. Сравнительная оценка погрешностей Слагаемые в подкоренных выражениях формул (7), (9), (12), (13) могут быть разного порядка малости относительно А. Если величины слагаемых отличаются более, чем на порядок, то меньшими можно пренебречь. Пусть в формуле (9) DАа = 1, DАb = 0, 1, DАc = 0, 01.Тогда Форма представления результата Результат представляется в округленном виде. 1. Вначале округляется абсолютная погрешность. Она округляется до одной значащей цифры, если первая значащая цифра равна 3, 4, 5 и т.д., или до двух значащих цифр, если первая из них равна 1 или 2. 2. Среднее значение округляется до того знака, в котором содержится погрешность. При записи результата применяйте множитель 10n или 10-n. Показатель степени должен быть одинаковым у среднего значения и у абсолютной погрешности. Не забывайте после записи численного результата указать единицы измерения.
z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif z: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifz: \Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifЛекция № 2. ВВЕДЕНИЕ. Физика — наука о наиболее простых и наиболее общих формах движения материи и их взаимных превращениях. Изучаемые физикой формы движения материи (механическая, тепловая и др.) присутствуют во всех высших и более сложных формах движения материи (химических, биологических и др.). Физика является фундаментальной естественной наукой, изучающей общие свойства материи, строение окружающего нас мира, законы взаимодействия и движения материальных тел. Физика — точная количественная наука, основанная на реальных фактах, поэтому изучение физики невозможно без знания математики. С одной стороны физика выросла из потребностей техники, а с другой стороны является основой создания новых технических отраслей. Физика тесно связана с философией и выводы из научных открытий в области физики являются основным источником философских обобщений. Физика — база для создания новых отраслей техники (электронная техника, ядерная техника и др.). Бурный темп развития физики, растущие связи ее с техникой указывают на значительную роль курса физики во втузе: это фундаментальная база для теоретической подготовки инженера, без которой его успешная деятельность невозможна. Основным методом исследования в физике является опыт — основанное на практике чувственно-эмпирическое познание объективной действительности, т. е. наблюдение исследуемых явлений в точно учитываемых условиях, позволяющих следить за ходом явлений и многократно воспроизводить его при повторении этих условий. Для объяснения экспериментальных фактов выдвигаются гипотезы. Гипотеза — это научное предположение, выдвигаемое для объяснения какого-либо явления и требующее проверки на опыте и теоретического обоснования для того, чтобы стать достоверной научной теорией. В результате обобщения экспериментальных фактов, а также результатов деятельности людей устанавливаются физические законы — устойчивые повторяющиеся объективные закономерности, существующие в природе. Основными разделами, изучаемыми в курсе физики, являются: механика и молекулярная физика (11 семестр), электростатика и магнетизм (111 семестр), оптика и ядерная физика (1V семестр). 2.2. Единицы физических величин. Наиболее важные законы устанавливают связь между физическими величинами, для чего необходимо эти величины измерять. Для построения системы единиц произвольно выбирают единицы для нескольких не зависящих друг от друга физических величии. Эти единицы называются основными. Остальные же величины и их единицы выводятся из законов, связывающих эти величины и их единицы с основными. Они называются производными. В настоящее время обязательна к применению Система Интернациональная (СИ), которая строится на семи основных единицах — метр, килограмм, секунда, ампер, кельвин, моль, кандела — и двух дополнительных — радиан и стерадиан. Метр (м) — длина пути, проходимого светом в вакууме за 1/299792458 с. Килограмм (кг) — масса, равная массе международного прототипа килограмма (платиноиридиевого цилиндра). Секунда (с) — время, равное 9192631770 периодам излучения, соответствующего переходу между двумя сверхтонкими уровнями основного состояния атома цезия-133. Ампер (А) — сила тока, который при прохождении по двум параллельным прямолинейным проводникам бесконечной длины и малого поперечного сечения, расположенным в вакууме на расстоянии 1 м один от другого, создаст между проводниками силу, равную 2× 10–7 Н на каждый метр длины. Кельвин (К) — 1/273, 16 часть термодинамической температуры тройной точки воды. Моль (моль) — количество вещества системы, содержащей столько структурных элементов, сколько атомов содержится в нуклиде 12С массой 0, 012 кг. Кандела (кд) — сила света в заданном направлении источника, испускающего монохроматическое излучение частотой 540× 1012 Гц, энергетическая сила света которого в этом направлении составляет 1/683 Вт/ср. Радиан (рад) — угол между двумя радиусами окружности, длина дуги между которыми равна радиусу. Стерадиан (ср) — телесный угол с вершиной в центре сферы, вырезающий на поверхности сферы площадь, равную площади квадрата со стороной, равной радиусу сферы. Для установления производных единиц используют физические законы, связывающие их с основными единицами. ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ. Основными понятиями векторной алгебры являются скаляры и векторы. 1) Скаляром называется функция точки, которая каждой точке ставит в соответствие определенное число. 2) Вектором называется функция точки, которая каждой точке ставит в соответствие определенное число и определенное направление.
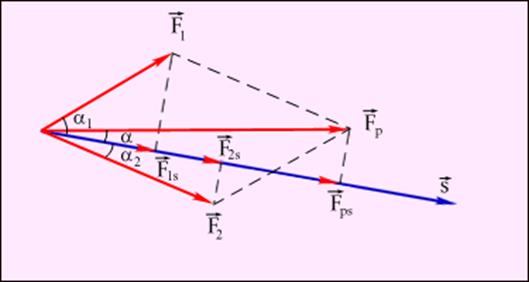
Под суммой (разностью) двух векторов a и b понимают вектор c = a + b, (2.1) длина и направление которого в каждой точке зависят от слагаемых также как, как длина и направление диагонали параллелограмма зависят от сторон, исходящих из вершин угла диагонали.
Для сложения векторов справедливы коммутативный ( a + b) = ( b+a) (2.2) и ассоциативный (a+b)+c=a+(b+c) (2.3) законы. Операция вычитания одного вектора из другого заменяется операцией сложения с вектором равным по величине и противоположным по направлению с вычитаемым вектором. Произведением вектора a на скаляр j является вектор длины в j раз больше вектора a, направление которого совпадает с направлением вектора a. Произведения двух векторов a и b. 1) Скалярное произведение (ab) представляет собой скаляр, равный произведению длин векторов a и b, умноженному на косинус угла, образованного их направлениями. (ab) = abcosj. (2.4). Отсюда вытекает, что (ab) = (ba). (2.5) 2) Векторное произведение [ab] представляет собой вектор, направленный перпендикулярно к плоскости, в которой лежат вектора a и b. Длина этого вектора равна |ab| = absin j, (2.6) т.е. равна площади параллелограмма, построенного на данных векторах. Физический смысл произведения векторов отличается от физического смысла перемножаемых векторов, но определяется ими. ПРОИЗВОДНАЯ И ИНТЕГРАЛ.
Рис. 4. Пример графического дифференцирования. Производной функции y = f(x) по аргументу x называется предел lim(Dy/Dx) отношения приращения функции Dy к приращению аргумента Dx, когда Dx®0. обозначается производная – f/(x) = df/dx. (2.7) Геометрически производная функции в точке Х 0 равна угловому коэффициенту касательной к графику функции, проведенной в точке с абсциссой У0. Физический смысл производной, функции определяется физическим смыслом самой функции y и физическим смыслом аргумента x. Неопределенным интегралом для функции f(x) называется совокупность функций F(x), определяемых условием dF(x)/dx = f(x), и записывается в форме F(x) = ò f(x) + C (2.8) с неопределенной постоянной интегрирования С. Определенный интеграл от f(x) по интервалу с границами a и b определяется и обозначается: aò b f(x)dx = F|ab = F(b) - F(a). (2.9).
Необходимо отметить, чтонеопределенный интеграл ФУНКЦИЯ, а определенный интеграл всегда ЧИСЛО. Операции дифференцирования и интегрирования являются противоположными по действию. Каждая из этих операций может быть выполнена повторно несколько раз, приводя к образам высшего порядка. Графически функция обычно изображается в виде кривой: а) производная от этой функции, в конкретной точке на графике определяется тангенсом угла между касательной в данной точке кривой и осью координаты x (t); б) определенный интеграл от этой функции, в пределах от a до b определяется величиной площади под данной кривой (в единицах произведения размерности у на размерность х ), ограниченной пределами а и b, осью х и кривой.
МЕХАНИКА. Механика — это часть физики, изучающая закономерности механического движения и причины вызывающие или изменяющие это движение. Механическое движение — это изменение с течением времени взаимного расположения тел или их частей в пространстве. Механика Галилея—Ньютона называется классической механикой. В ней изучаются законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света с в вакууме. Законы движения макроскопических тел со скоростями, сравнимыми со скоростью с, изучаются релятивистской механикой, основанной на специальной теории относительности, сформулированной А. Эйнштейном (1879—1955). Для описания движения микроскопических тел (отдельные атомы и элементарные частицы) законы классической механики неприменимы — они заменяются законами китовой механики. Механика делится на три раздела: I) кинематику; 2) динамику; 3) статику. Кинематика изучает движение тел, не рассматривая причины, которые это движение обусловливают. Динамика изучает законы движения тел и причины, которые вызывают или изменяют это движение. Статика изучает законы равновесия системы тел. Если известны законы движения тел, то из них можно установить и законы равновесия. Поэтому законы статики отдельно от законов динамики физика не рассматривает. Для количественного описания механического движения тел вводятся величины, характеризующие пространство в котором тела перемещаются, время в течение которого тела перемещаются и маcса, являющаяся собственным свойством тел. Характеристикой пространства является ДЛИНА- l , определяемая как геометрическое расстояние между двумя точками в пространстве. Поскольку пространство наше трехмерно, то положение тела в нем определяется тремя параметрами x, y, z. ВРЕМЯ - t между двумя событиями в данной точке пространства определяется как разность между показаниями прибора, в основе которого лежит строго периодический и равномерный физический процесс. Основные задачи механики делятся на прямые и обратные. Прямая – определить законы движения материальной точки, взаимодействующей с другими телами, если известны все силы действующие на нее, ее начальное механическое состояние, т.е. ее положение и скорость в начальный момент времени. Обратная – определить силы, действующие на материальную точку со стороны других тел, если закон движения известен. Задачи решаются последовательно. Для прямой – сила → ускорение → скорость → перемещение → координаты (F → a → v → S → x, y, z ). Для обратной -- координаты → перемещение → скорость → ускорение сила (x, y, z → S → v → F). Механика может быть разделена на разделы по различным характеристикам: 1) по модели; 2) по характеру решаемых задач (кинематика, динамика, статика; 3) по видам движения (поступательное, вращательное). Механика подразделяется на кинематику и динамику. Кинематикой называется часть механики, изучающая механическое движение тел без рассмотрения причин, вызывающих это движение. Динамикой называется раздел механики, изучающий движение материальных тел совместно с причинами, вызывающими это движение. Статика – раздел механики, изучающий состояние покоя тел.
ПРОСТРАНСТВО И ВРЕМЯ. Движение тел происходит в пространстве и во времени. Для описания движения точки необходимо знать, в каких местах пространства и когда эта точка находится. Положение тела в пространстве можно задавать либо его тремя проекциями в декартовой системе координат x, y, z, либо радиус-вектором r. Системой отсчета называется тело отсчета вместе с приборами для измерения расстояний и промежутков времени. С телом отсчета часто связывается система координат. Число независимых координат, полностью определяющих положение тела в пространстве, называется числом степеней свободы. Если материальная точка свободно движется в пространстве, то, как уже было сказано, она обладает тремя степенями свободы (координаты х, у и z), если она движется по некоторой поверхности, то двумя степенями свободы, если вдоль некоторой линии, то одной степенью свободы. Траектория движения материальной точки — линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. Для твердого тела добавляются еще три степени свободы вращательного движения, т.е. оно имеет шесть степеней свободы. При движении координаты с течением времени изменяются. Уравнения, характеризующие эти изменения, называются кинематическим уравнениями движения. МОДЕЛИ В МЕХАНИКЕ. В механике рассматривается не движение реальных объектов, а их физических моделей. Модель - это упрощенное, схематизированное представление, в котором выделены наиболее важные черты. Основные модели в механике: Материальная точка, Твердое тело, Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 1465; Нарушение авторского права страницы
 .
. .
. ,
,  ,
,  , приходим к следующему выражению для относительной погрешности:
, приходим к следующему выражению для относительной погрешности:  . (13)
. (13) .
. .
. ± Da)ед. изм.
при доверительной вероятности Р = 0, 95;
числе измерений n =...;
относительной погрешности e =...%.
± Da)ед. изм.
при доверительной вероятности Р = 0, 95;
числе измерений n =...;
относительной погрешности e =...%.