|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
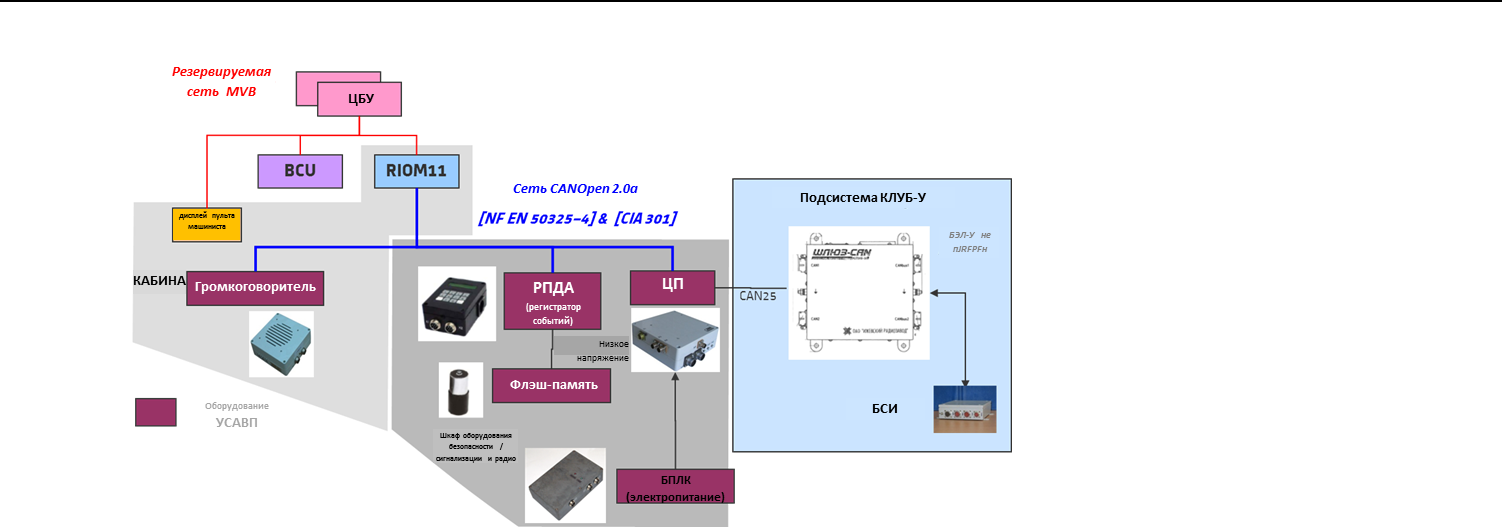
A.32.3. Структура аппаратного обеспечения УСАВП
Структура аппаратного обеспечения электровозов KZ8A приведена ниже:
Система УСАВП состоит изнабора модулей, позволяющего адаптировать её к любому типу электровозов. Все модули поддерживают технические требования CANOpen2.oa и взаимодействуютв соответствии с этими требованиями, что упрощает конфигурацию системы. Модули УСАВП: · ЦП: центральный процессор ЦП – это модуль, который осуществляет основную функцию. Он собирает все данные, измеренные входными модулями (или получает их от системы управления электровозом через CAN), рассчитывает необходимое действие по управлению и отправляет его непосредственно в систему управления электровозом или в выходные модули. Кроме того, ЦП пополняет базу данных программы маршрута информацией о профиле пути, путевой схеме, ограничениях скорости, местонахождении светофоров и станциях. Некоторые расчёты, осуществляемые ЦП, требуют получения информацииот других систем или устройств, например, о надлежащей позиции контроллера на электровозах с дискретным управлением, о расчёте управления пневматическим тормозом и о расчётеэнергосберегающей траектории. К тому же, ЦП оборудован небольшим контроллером, называемым пультом сброса ЦП, который позволяет осуществить самостоятельный аппаратный сброс.
ЦП выполнен на базе микропроцессора AMD Geode, оснащён флэш-памятью на 16Мб, двумя независимыми интерфейсами CAN, двумя интерфейсами RS-232. Системное программное обеспечение – система реального времени OnTime Informatic RTOS-32.
· РПДА: Регистратор событий Этот модуль записывает данные, полученные от входных модулей, и команды системы автоведения на флэш-накопитель (картридж РПДА).Записанные данные декодируются при помощи специальных программ.
· Флэш-память Флэш-память вставлена в модуль РПДА, она хранит данные, записываемые модулем.
· Громкоговоритель (синтезатор речи с усилителем). Громкоговоритель помогает машинисту, воспроизводя некоторые сообщения, требующие внимания: о сигналах светофора, переездах и других событиях. Он получает номер сообщения от ЦП и проигрывает соответствующее сообщение.
· БПЛК: блок питания БПЛКобеспечивает электроэнергией другие модули.
Информация, которой обмениваются подсистемы:
Система Alstom ATSA => Система автоведения УСАВП: · Состояние электровоза (“Электровоз готов”) · Обнаружение разрыва поезда · Ограничение токов тяги и торможения (чтобы адаптировать кривую F=f(V)) · Режим ручного управления затребован/принудительно инициирован машинистом · Состояние автоматического выключателя · Положение главного контроллера · Положение контроллера основного тормоза · Положение контроллера прямодействующего тормоза · Информация о перегрузке, полученная от ЦП · Ведущая кабина · Режим работы · Давление в тормозноймагистрали · Давление в уравнительном резервуаре · Давление в тормозном цилиндре · Давление в главном резервуаре · Осуществлённое тяговое/электродинамическое тормозное усилие(кН) · Ограничение скорости · Значение действительной скорости, полученное отБлока управления тягой · Значение ускорения колёс, полученное отБлока управления тягой · Номинальное давление тормозного крана машиниста (миллибар) · Напряжение контактного провода · Ток тягового трансформатора · Информационные коды, вводимые с клавиатуры · Состояние выполнения команды (полученной от системы УСАВП).
Система Alstom ATSA < = Система автоведения УСАВП: · Команды для ЦБУ (центрального блока управления), BCU (блока управления тормозами), или БУТ (блока управления тягой) o Пневматическое торможение давлением o Отмена пневматического торможения давлением o Установить режим ручного/автоматизированного управления o Установить BCUпневматического торможенияв положение: нейтральное / отпускания / торможения/поездное o Остановить тягу o Остановить электродинамическое торможение o Заданное тяговое/электродинамическое тормозное усилие (кН) с заданной скоростью (км/ч) o Заданная скорость (км/ч) o Остановить (для прерывания выполняемой команды). · Инструкции, отображаемые на экране системы автоведения · Значение действительной скорости, полученное от подсистемы КЛУБ-У для автоматического поддержания скорости · Координаты Глобальной навигационной спутниковой системы/ Глобальной системы определения местоположения (широта и долгота) · Правильность Глобальной навигационной спутниковой системы/ Глобальной системы определения местоположения (правильно приняты координаты или нет) · Дата и время КЛУБ.
Система сигнализации КЛУБ-У => Система автоведения УСАВП: · Состояние ЭПК (в т.ч. положение ключа в кабинах) · Разрешённая скорость · Следующий тип объекта (светофор, переезд и т.д.) · Расстояние до следующего объекта · Разрешённая скоростьна следующем объекте · Состояние кнопок (РБ и РБС) · Сигналы светофора, отображающихся в кабине, количество свободных секций светофора впереди электровоза, дорожный знак переезда, регулируемого светофором · Флажковая индикация боксования колёс · Состояние движения(поезд, маневровый режим, сцепленные электровозы) · Направление движения (ведущая кабина) · Скорость электровоза с точностью до 1 км/ч · Значение ускорения · Линейные координаты · Дата и время · Географическое положение электровоза по данным навигации Глобальной навигационной спутниковой системы/ Глобальной системы определения местоположения, время, синхронизированное со спутником · Местоположение электровоза в железнодорожных координатах (знаки километровый – пикетный) · Параметры маршрута (номер/тип электровоза, длина/вес поезда, диаметр колёс, табельный номер машиниста) · Постоянные ограничения скорости, полученные из базы данных КЛУБ-У · Состояние ТСКБМ.
Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 1196; Нарушение авторского права страницы