
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет динамических характеристик шпиндельных узлов
Показатели динамического качества некоторых станков определяются в основном параметрами шпиндельных узлов. К таким станкам относятся, например, токарные (особенно при обработке в патроне), координатно-расточные (при работе жесткой борштангой), внутришлифовальные, расточные и др. Естественно, что вместо расчета динамических характеристик всего станка в таких случаях можно ограничиться расчетом характеристик только шпиндельного узла. Расчет характеристик шпинделя можно вести по методике, описанной выше, т. е. рассматривать шпиндель в виде невесомой упругой балки на упругодемпфирующих опорах с некоторым количеством сосредоточенных масс. Однако для многоопорных шпинделей или шпинделей, имеющих в одной опоре несколько подшипников, при расчете требуется выполнять раскрытие статической неопределимости. Это усложняет расчет. Среди численных методов расчета статических и динамических характеристик шпиндельных узлов станков как линейных упругих систем получил распространение метод начальных параметров в матричной формулировке (метод переходных матриц). Рассмотрим основные положения этого метода расчета. Шпиндель станка (рис. 4.1) рассматривают как ступенчатую балку длиной Смонтированные на шпинделе детали (шкивы, зубчатые колеса, патрон) представляют в виде сосредоточенных грузов, расположенных на границах участков и имеющих массу Расчет динамических характеристик шпиндельного узла сводится к определению амплитуд установившихся колебаний шпинделя в нулевом сечении (на переднем конце) от гармонических силовых возмущений со стороны процесса резания, привода и т. п.
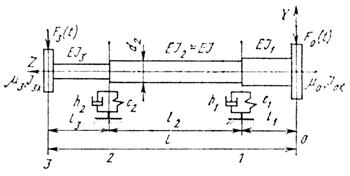
Линейная постановка задачи позволяет использовать принцип суперпозиции и последовательно определять характеристики узла при всех указанных выше воздействиях. Рассмотрим применение метода начальных параметров для расчета динамических характеристик шпинделя, схема которого показана на рис. 4.1. Шпиндель разбит на три участка. На концах его расположены сосредоточенные грузы (например, патрон и шкив ременной передачи). В нулевом сечении шпинделя действуют возмущения со стороны процесса резания — сила F0 (t), в третьем сечении — возмущения от привода F3 (t) Обозначив в i-м сечении амплитуду перемещений через Yi, угол поворота сечения через
Метод позволяет связать параметры в нулевом сечении шпинделя через переходные матрицы его сечений и участков с параметрами в третьем сечении. При колебаниях в нулевом сечении действуют сосредоточенная сила и момент инерционных сил патрона, амплитудные значения которых соответственно равны
Где преобразует параметры
Где а функции A1, B1, C1, D1 могут быть представлены в виде степенных рядов. Над опорой 1 перерезывающая сила изменяется скачком на величину реакции опоры (учитываются упругая и диссипативная составляющие реакции). Этот скачок при переходе через опору учитывается умножением вектора параметров на матрицу опоры
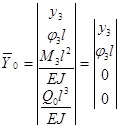
где Переходя, таким образом, от участка к участку, доходят до левого конца шпинделя, где параметры выражены вектором
где переходная матрица П для схемы, приведенной на рис. 4.1, равна произведению
где L0 и L3 — матрицы сосредоточенных грузов в нулевом и третьем сечениях; Т1, Т2 и Т3 — матрицы 1, 2 и 3-го участков шпинделя с распределенной массой; Q1 и Q2 — матрицы линейно-упругих опор шпинделя с вязким демпфированием. С учетом внешней нагрузки в нулевом и третьем сечениях уравнение (4.1) примет вид
где
Определение переходной матрицы П сводится к перемножению нескольких матриц размером 4X4. Обычно на концах шпинделя два из четырех параметров в матрицах-столбцах
Как видим, в матрице П следует из 16 сохранить только шесть элементов, которые расположены на пересечении строк, совпадающих с нулевыми строками вектора
где коэффициенты а являются функциями частоты Непосредственно из уравнений (4.3) может быть получено выражение для частотной передаточной функции системы
Аналогично определяют и частотную передаточную функцию
Вычисление элементов переходных матриц-сомножителей и их последующее умножение производится на ЭВМ. Так как некоторые элементы матриц Q1 и Q2 упругодемпфирующих опор являются комплексными числами, то переходная матрица-произведение
используя для определения Р1, Р2, Р3 и Р4 элементы матриц S1 и S2. После разделения действительной и мнимой частей выражения (4.6) получают возможность определения составляющих
Лабораторная работа 5 Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 631; Нарушение авторского права страницы
 на упругих опорах с вязким демпфированием, пропорциональным скорости колебаний. Балку разбивают на N участков, разграниченных изменением диаметра (геометрического момента инерции), опорой, сосредоточенной массой, внешней сосредоточенной нагрузкой или скачком распределенной нагрузки. Каждый i-й участок имеет постоянные (в пределах участка) распределенную массу mi и изгибную жесткость EJi.
на упругих опорах с вязким демпфированием, пропорциональным скорости колебаний. Балку разбивают на N участков, разграниченных изменением диаметра (геометрического момента инерции), опорой, сосредоточенной массой, внешней сосредоточенной нагрузкой или скачком распределенной нагрузки. Каждый i-й участок имеет постоянные (в пределах участка) распределенную массу mi и изгибную жесткость EJi. и момент инерции Jix. При составлении расчетной схемы используют общепринятые рекомендации относительно опор шпинделя, представляя их в виде линейно-упругих опор (при радиальном и угловом смещениях) с вязким демпфированием.
и момент инерции Jix. При составлении расчетной схемы используют общепринятые рекомендации относительно опор шпинделя, представляя их в виде линейно-упругих опор (при радиальном и угловом смещениях) с вязким демпфированием. ; изгибающий момент через Mi и поперечную силу через Qi можно выразить решение дифференциального уравнения колебаний шпинделя через параметры yi,
; изгибающий момент через Mi и поперечную силу через Qi можно выразить решение дифференциального уравнения колебаний шпинделя через параметры yi,  ,
,  ,
,  напряженного и деформированного состояния на его концах (за EJ — EJ2 принята жесткость межопорной части шпинделя;
напряженного и деформированного состояния на его концах (за EJ — EJ2 принята жесткость межопорной части шпинделя;  ;
; 
 и
и  - Матрица сосредоточенного груза
- Матрица сосредоточенного груза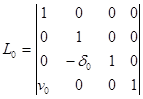 ,
,  ;
;  ,
,  при переходе через нулевое сечение. Далее идет первый участок шпинделя с распределенной массой
при переходе через нулевое сечение. Далее идет первый участок шпинделя с распределенной массой  и жесткостью EJ1. Зависимость между параметрами на его концах определяется переходной матрицей участка:
и жесткостью EJ1. Зависимость между параметрами на его концах определяется переходной матрицей участка: 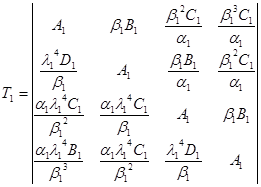 ,
,  ;
;  ;
;  ,
,  ,
,  ;
;  (
(  и
и  ) соответственно коэффициенты жесткости и демпфирования опоры;
) соответственно коэффициенты жесткости и демпфирования опоры;  )
) . В результате получают матричные уравнения (без учета внешней нагрузки)
. В результате получают матричные уравнения (без учета внешней нагрузки) , (4.1)
, (4.1) ,
,  , (4.2)
, (4.2) ;
;  .
. ) системы по воздействию со стороны процесса резания (при F3 = 0) уравнение (4.2) в развернутом виде записывают так:
) системы по воздействию со стороны процесса резания (при F3 = 0) уравнение (4.2) в развернутом виде записывают так: 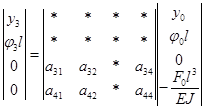 .
. ) (остальные элементы, не используемые в расчетах, заменены звездочками). В результате можно записать два линейных уравнения относительно искомых параметров
) (остальные элементы, не используемые в расчетах, заменены звездочками). В результате можно записать два линейных уравнения относительно искомых параметров  и
и  :
:  ;
;  , (4.3)
, (4.3) инерционных, диссипативных, упругих и геометрических параметров шпиндельного узла.
инерционных, диссипативных, упругих и геометрических параметров шпиндельного узла. . (4.4)
. (4.4) системы по воздействию со стороны привода (при F0 = 0). Опуская промежуточные выкладки, получим
системы по воздействию со стороны привода (при F0 = 0). Опуская промежуточные выкладки, получим . (4.5)
. (4.5) также оказывается состоящей из двух матриц S1 и S2. Выражение для частотных передаточных функций W0 (
также оказывается состоящей из двух матриц S1 и S2. Выражение для частотных передаточных функций W0 (  (4.6)
(4.6) и
и  амплитудно-фазовой частотной характеристики динамической системы шпиндельного узла.
амплитудно-фазовой частотной характеристики динамической системы шпиндельного узла.