
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет погрешностей ТСС и оценка их влияния
На точность судовождения Расчет кривой суммарной инерционной погрешности гирокомпасов «Курс-4» и «Вега»
В настоящее время большинство судов мирового транспортного флота оснащены гироскопическими компасами, в конструкции которых не предусмотрены какие-либо устройства для вычисления и исключения инерционных девиаций, возникающих при маневрировании судна. К указанным компасам относятся и два основных типа курсоуказателя, применяемые на судах морского флота – гирокомпасы типа «Курс-4» и «Вега». По этой причине судоводителю следует считаться с тем, что показания гирокомпаса в процессе маневра и в течение некоторого времени после его окончания будут содержать погрешности. В целях снижения влияния возникающих инерционных девиаций на точность и безопасность судовождения, необходимо принимать в расчет следующее: 1) факт существования инерционной девиации и поперечного смещения в результате маневрирования судна; 2) качественную картину их развития во времени в различных широтах плавания; 3) ориентировочную численную оценку возможной величины девиации и поперечного смещения, особенно их пиковые значения.
Задание 2.1.1. Произвести расчет и построение кривой суммарной инерционной погрешности гирокомпаса «Курс-4», возникающей в результате маневрирования.
Исходные данные. В широте φ судно производит маневр изменением скорости судна и курса. При этом ГКК1, V1, ГКК2 и V2 – курс и скорость судна соответственно до и после маневра. Порядок выполнения задания
1. Расчёт суммарной инерционной погрешности производится по формуле: δ ј где ∆ VN – изменение северной составляющей скорости судна (м/с), расчёт которой производится по формуле:
∆ VN = V2cos ГКК2 – V1cos ГКК1; (2)
ω d – частота затухающих колебаний гиросферы (с-1); h – коэффициент затухания (с-1); m – коэффициент апериодического члена (с-1); А, С – постоянные интегрирования (с·м-1); t – время (с); ψ – начальная фаза (градусы). В свою очередь значение коэффициента А вычисляется с помощью выражения:
где Rз (R ♁ ) – радиус (6378·103 м) и ω З (ω ♁ ) – угловая скорость (7, 29·10-5 с-1) суточного вращения Земли; ω α – частота незатухающих колебаний гиросферы в расчётной широте (12, 2∙ 10-4 с-1); F – фактор перетекания (1, 5∙ 10-3 с-1); S0 – конструктивная постоянная (0, 493). Значения постоянной интегрирования С и начальной фазы ψ зависят от тех же переменных, что и А, и задаются преподавателем в зависимости от варианта. 2. Для расчёта кривой суммарной инерционной погрешности гирокомпаса «Курс-4» вначале необходимо найти значения ∆ VN, постоянной интегрирования А по формуле (3), используя данные табл. 1, содержащей значения параметров ω d, ω 0, m и h в зависимости от широты φ места маневра. Таблица 1
Зависимость параметров от широты
3. Используя результаты расчётов ∆ VN, А, заданные значения С и ψ, а также данные таблицы 1, по формуле (1) составить и рассчитать суммарную инерционную погрешность гирокомпаса «Курс-4» в интервале времени от t = 0 до t = 7200 с (шаг ∆ t =180 с). Результаты расчётов представить в табличном и графическом виде. Необходимо помнить, что аргументом тригонометрических функций sin и cos является угол ω dt, выраженный в радианах. По заданию 2.1.1 необходимо представить: а) расчёты постоянной интегрирования А и суммарной инерционной погрешности δ ј; б) численные значения постоянной интегрирования А и ∆ VN; в) таблицу вычисленных значений и график суммарной инерционной погрешности δ ј в зависимости от времени t, причём δ ј рассчитывается с точностью до 0, 01, а график выполняется на листе бумаги формата А3 или листе миллиметровой бумаги. Пример расчёта задания 2.1.1
Исходные данные: φ = 0; ГКК1 =320; V1= 19 уз; ГКК2= 2010; V2= 15 уз; С = 21, 2∙ 10-4 с м-1; ψ = -420.
1. Рассчитываем изменение северной составляющей скорости судна ∆ VN по формуле (2):
∆ VN = 15cos201 – 19cos32 = -14, 0 – 16, 1= -30, 1 (уз), выражаем ∆ VN в м∙ с-1, ∆ VN =-30, 1
2. Находим значение постоянной интегрирования А по формуле (3):
3. По формуле (1) рассчитываем значение δ ј:
с шагом Δ t = 180 с.
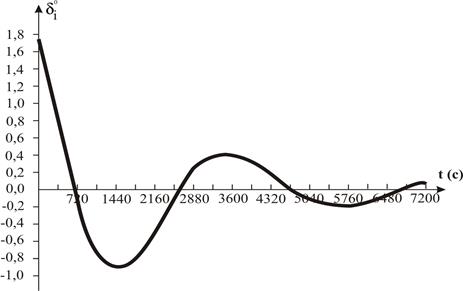
Результаты расчёта представляем в табл. 2 и на рис. 1: Таблица 2 Результаты расчёта δ ј:
Рис. 1 Задание 2.1.2. Произвести расчёт кривой суммарной инерционной погрешности гирокомпаса «Вега», возникающей при маневрировании.
Исходные данные: в широте φ судно совершает маневр изменением курса при неизменной скорости V, причём поворот производится с постоянной угловой скоростью ω. Значение курса до маневра ГКК1, после – ГКК2, продолжительность маневра Δ tм.
Порядок выполнения задания:
1. Расчёт кривой суммарной инерционной погрешности гирокомпаса «Вега» производится по формуле:
δ ј = -Vω [Nе-mt + Mе-ht sin(ω dt + ψ )]·57.30, (4)
где m – коэффициент апериодического члена, не зависящий от широты (25, 65·10-3с-1); h – коэффициент затухания, также не зависящий от широты (3, 85·10-4с-1); ω d – частота затухающих колебаний (с-1), значение которой в зависимости от широты выбирается из табл. 3; ω – угловая скорость поворота (с-1); N, M – постоянные интегрирования (с2, м-1); Ψ – начальная фаза (градусы); V – скорость судна (м·с-1). Таблица 3 Значения ω d
Значения постоянных интегрирования N, M и начальной фазы Ψ задаются преподавателем в зависимости от варианта. 2. Для расчёта кривой суммарной инерционной погрешности гирокомпаса «Вега» вначале необходимо найти значение средней угловой скорости поворота судна ω (с-1) по формуле:
ω =
где Δ tM – продолжительность маневра (с); 3. Используя полученное значение ω, заданные величины N, M и Ψ, а также данные табл. 3 по формуле (4) рассчитать суммарную инерционную погрешность δ ј гирокомпаса «Вега» в интервале времени от t0 = 0 до t = 7200 с (шаг Δ t = 1800). Результаты расчёта представить в табличной форме и графическом виде.
По заданию 2.1.2 необходимо представить: а) расчёт суммарной инерционной погрешности; б) численное значение ω; в) таблицу вычисленных значений и график суммарной инерционной погрешности в зависимости от времени t (расчёт δ ј производить с точностью до 0, 01, а график выполняется на листе бумаги формата А3 или на миллиметровой бумаге).
Пример расчёта задания 2.1.2
Исходные данные: φ = 0; ГКК1 =180; V= 15 уз; ГКК2= 0; Δ tM = 90 с; М = 0, 108 с2·м -1; N = 0, 0356 с2·м -1; ψ = 700. 1. Рассчитываем значение средней угловой скорости поворота судна ω по формуле (5): ω =
2. Выражаем V в м·с-1:
V = 15
3. По формуле (4) рассчитываем δ ј:
или δ ј = 0, 55 е-0, 02565t + 1, 67 е -0, 0003875t sin(0, 061t + 70) с шагом Δ t = 180 с.
Результаты расчёта представлены в табл. 4 и на рис. 2.
Таблица 4 Результаты расчёта
Рис. 2
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 765; Нарушение авторского права страницы
 = 57, 30 ∆ VN[А е-mt + Се-ht sіn (ω d·t + ψ )], (1)
= 57, 30 ∆ VN[А е-mt + Се-ht sіn (ω d·t + ψ )], (1) , (3)
, (3) -15, 5 (м∙ с-1).
-15, 5 (м∙ с-1).

 , (5)
, (5) = -0, 035 с-1.
= -0, 035 с-1. = 7, 72 м·с-1.
= 7, 72 м·с-1. ,
, 