
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Д5. Применение уравнения Лагранжа
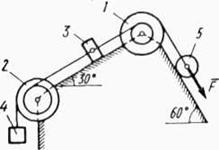
Механическая система состоит из ступенчатых шкивов 1 и 2 весом Р1 и Р2 с радиусами ступеней R1 = R, r2 = 0, 4 R; R2 = R, r2 = 0, 8R (массу каждого шкива считать равномерно распределенной по его внешнему ободу); грузов 3, 4 и сплошного однородного цилиндрического катка 5 весом Р3,. P4, Р5, соответственно (рис. Д5.0-Д5.9,. табл. Д5). Тела системы соединены нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Грузы скользят по плоскостям без трения, а катки катятся без скольжения.
Рис. Д5.6 Рис. Д5.7
Рис. Д5.8 Рис. Д5.9 Кроме сил тяжести на одно из тел системы действует постоянная сила F, а на шкивы 1 и 2 при их вращении действуют постоянные моменты сил сопротивления, равные соответственно М1, и М2. Составить для данной системы уравнение Лагранжа и определить из него величину, указанную в таблице в столбце " Найти", где обозначено: ε 1, ε 2 - угловые ускорения шкивов 1 и 2, a3, a4, аС5 - ускорения грузов 3, 4 и центра масс катка 5 соответственно. Когда в задаче надо определить ε 1, или ε 2, считать R = 0, 25 м. Тот из грузов 3, 4, вес которого равен нулю, на чертеже не изображать. Шкивы 1 и 2 всегда входят в систему. Таблица Д5
Указания. Задача Д5 - на применение к изучению движения системы уравнений Лагранжа. В задаче система имеет одну степень свободы, следовательно, ее положение определяется одной обобщенной координатой и для нее должно быть составлено одно уравнение. За обобщенную координату q принять: в задачах, где требуется определить а3, а4 или aС5, - перемещение х соответствующего груза или центра масс С5, катка 5; в задачах, где требуется определить ε 1, или ε 2, - угол поворота φ соответствующего шкива. Для составления уравнения вычислить сначала кинетическую энергию Т системы (как в задаче ДЗ) и выразить все вошедшие в Т скорости через обобщенную скорость, т.е. через Пример Д5. Механическая система состоит из ступенчатого шкива 2 (радиусы ступеней R2 и r2), груза 1 и сплошного катка 3, прикрепленных к концам нитей, намотанных на ступени шкива. На шкив при его вращении действует момент сил сопротивления М2. Массу шкива считать равномерно распределенной по внешнему ободу.
Решение. 1. Система имеет одну степень свободы. Выберем в качестве обобщенной координаты перемещение х груза 1 (q=x), полагая, что груз движется вниз, и, отсчитывая х в сторону движения. Составим уравнение Лагранжа 2. Определим кинетическую энергию системы, равную сумме энергий всех тел: Т=Т1 + Т2 + T3. Так как груз 1 движется поступательно, шкив 2 вращается вокруг неподвижной оси, а каток 3 движется плоскопараллельно, то
где, поскольку масса шкива считается распределенной по внешнему ободу, а каток - сплошной (его радиус обозначим r3),
3. Все скорости, входящие в T1, T2, и T3, выразим через обобщенную скорость
Окончательно Т= 4. Найдем обобщенную силу Q. Для этого изобразим силы, совершающие при движении системы работу и момент сил сопротивления, направленный против вращения шкива. Затем сообщим системе возможное перемещение, при котором обобщенная координата х получает положительное приращение δ х, и покажем перемещения каждого из тел; для груза 1 это будет δ s1 = δ х, для шкива 2 - поворот на угол δ φ 2 для катка 3 - перемещение δ s3 его центра. После этого вычислим сумму элементарных работ сил и момента на данных перемещениях. Получим δ А =P1δ s1 - М2 δ φ 2 – Р3 sin α ·δ s, Все входящие сюда перемещения надо выразить через δ х. Учтя, что зависимости между элементарными перемещениями здесь аналогичны зависимостям между соответствующими скоростями δ А = Коэффициент при δ х в полученном выражении и будет обобщенной силой Q. Следовательно 5. Подставляя найденные величины в уравнение Лагранжа, получим
Отсюда искомое ускорение а1 = Ответ: а, = 0, 37 g. Примечание. Если в ответе получится а < 0 (или ε < 0), то это означает, что система движется не в ту сторону, куда было предположено. Тогда у момента М2, направленного против вращения шкива, изменится направление и, следовательно, как видно из равенства, изменится величина Q, для которой надо найти новое верное значение. Литература 1. Тарг, С.М. Краткий курс теоретической механики. Учебник. / С.М. Тарг. - М.: Высшая школа, 2002. – 416 с. 2. Мещерский, И.В. Сборник задач по теоретической механике. Учебное пособие. / И.В, Мещерский. - М.: Наука, 1998. – 448 с. 3. Сборник заданий для курсовых работ по теоретической механике. Учебное пособие под ред. А.А. Яблонского. М.: Наука, 1998. 4. Цывильский, В.Л. Теоретическая механика. Учебник. / В.Л. Цывильский. - М.: Высшая школа, 2001. – 319 с. Содержание
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 994; Нарушение авторского права страницы
 Рис. Д5.4 Рис. Д5.5
Рис. Д5.4 Рис. Д5.5


 , если обобщенная координата х, или через
, если обобщенная координата х, или через  , если обобщенная координата φ. Затем вычислить обобщенную силу Q. Для этого сообщить системе возможное (малое) перемещение, при котором выбранная координата, т.е. х (или φ ), получает положительное приращение δ х (или δ φ ), и вычислить сумму элементарных работ всех сил на этом перемещении; в полученном равенстве надо все другие элементарные перемещения выразить через δ х (или через δ φ , если обобщенная координата φ ) и вынести δ х (или δ φ )за скобки. Коэффициент при δ х (или δ φ )и будет обобщенной силой Q (см. еще пример Д5).
, если обобщенная координата φ. Затем вычислить обобщенную силу Q. Для этого сообщить системе возможное (малое) перемещение, при котором выбранная координата, т.е. х (или φ ), получает положительное приращение δ х (или δ φ ), и вычислить сумму элементарных работ всех сил на этом перемещении; в полученном равенстве надо все другие элементарные перемещения выразить через δ х (или через δ φ , если обобщенная координата φ ) и вынести δ х (или δ φ )за скобки. Коэффициент при δ х (или δ φ )и будет обобщенной силой Q (см. еще пример Д5). Рис. 20
Рис. 20
 .
. ,
,  ,
, 


 =
= 
 .
. .
.

 .
.