
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Статика. Основные положения.
Статика. Основные положения. Сила, приложенная к точке, изображается вектором , равным по величине данной силе и направленным в сторону ее действия. Механической системой называется совокупность материальных частиц, в которой движение каждой частицы зависит от положения и движения остальных. Механическая система называется неизменяемой, если расстояние между каждыми двумя ее точками постоянно; в противном случае система называется изменяемой, или деформируемой. Твердым телом или точнее абсолютно твердым называется система, в которой при исследовании или изучении данного механического явления можно пренебречь взаимными смещениями частиц. Силу, не нарушая ее действия, можно в абсолютно твердом теле переносить в любую точку, лежащую на линии ее действия. Силы взаимодействия между частицами или телами системы называются внутренними; силы, действующие со стороны тел, не принадлежащих к системе, называются внешними. Системы сил, производящие на тело одно и то же действие, называются эквивалентными. Сила, эквивалентная системе сил, называется ее равнодействующей. Сила может быть сосредоточенной (если она приложена в одной точке) или распределенной (приложена по длине, поверхности или объему данного тела). Условия, стесняющие свободу движения механической системы, называются связями. Сила, заменяющая действие связи, называется реакцией связи. Реакции — силы пассивные; прочие силы (обычно задаваемые) называются активными. Связи реализуются в виде каких-то тел не входящих в изучаемую систему. (+ момент и пара сил). Механика твердого тела. Статика твердого тела (общие понятия). Твердым телом или точнее абсолютно твердым называется система, в которой при исследовании или изучении данного механического явления можно пренебречь взаимными смещениями частиц. Силу, не нарушая ее действия, можно в абсолютно твердом теле переносить в любую точку, лежащую на линии ее действия. Силы взаимодействия между частицами или телами системы называются внутренними; силы, действующие со стороны тел, не принадлежащих к системе, называются внешними. Системы сил, производящие на тело одно и то же действие, называются эквивалентными. Сила, эквивалентная системе сил, называется ее равнодействующей. Сила может быть сосредоточенной (если она приложена в одной точке) или распределенной (приложена по длине, поверхности или объему данного тела). Условия, стесняющие свободу движения механической системы, называются связями. Сила, заменяющая действие связи, называется реакцией связи. Реакции — силы пассивные; прочие силы (обычно задаваемые) называются активными. Связи реализуются в виде каких-то тел не входящих в изучаемую систему. + ОСНОВНЫЕ ТИПЫ СВЯЗЕЙ (см.лекции) Условие равновесия. Внешние, внутренние силы. Если конструкция рассматривается изолированно от окружающих тел, то действие последних на конструкцию заменяется силами, которые называются внешними. Объемные силы распределены по объему тела и приложены к каждой его частице. К объемным силам относится вес или, силы магнитного притяжения. Поверхностные силы приложены к участкам поверхности и характеризуют непосредственное контактное взаимодействие рассматриваемого объекта с окружающими телами. Внешние силы, их величина и характер распределения зависят в первую очередь от того, где проходит граница между рассматриваемым объектом и окружающими его телами. Пусть к стержню приложена некоторая нагрузка, т. е. система внешних сил Р1, Р2, -.., Рп удовлетворяющая условиям равновесия
а также(Рn)п -(РА)=0. равнодействующая внутренних сил (РА) в сечении А может определяться с равным успехом из условий равновесия либо левой, либо правой части рассеченного тела. Динамика точки. Основные законы динамики. Прямая и обратная задача динамики Дифференциальное уравнение прямолинейного движения точки. Если отнести точку с массой m, находящуюся под действием силы Р, к координате s, дифференциальное уравнение движения имеет вид: md2s/dt2= P. При задании закона движения s = f(t) (прямая или первая задача динамики) сила находится двукратным дифференцированием. При задании силы Р=P(t, s, v) (обратная или вторая задача динамики) закон движения находится интегрированием дифференциального уравнения движения. Трение качения.
При качении тела по поверхности к его оси должна быть приложена сила Р для преодоления сопротивления, выражаемого моментом сопротивления при качении (моментом пары трения качения): m = k N, где N — нормальное давление; k — коэффициент трения качения (выражается в единицах длины), называемый также плечом пары трения.
Трение скольжения
Центр тяжести Центром тяжести C материальной системы (или тела) называется центр параллельных сил, приложенных ко всем частицам системы и пропорциональных весам этих частиц. Эта точка, называемая также центром масс или центром инерции (вне зависимости от веса), имеет координаты: xС = (∑ mi xi ) / M: yС = (∑ mi yi ) / M: zС = (∑ mi zi ) / M. где mi - массы частицы с координатами xi, yi, zi; М = ∑ mi масса всей системы (тела); ∑ mi xi, ∑ mi yi, ∑ mi zi -статические моменты массы тела относительно координатных плоскостей yOz, zOx, xOy. под mi, можно понимать также массы конечных элементов тела, а под xi, yi, zi — координаты центра тяжести элемента с массой mi. для линий: xС = (∑ ∆ Li xi ) / L: yС = (∑ ∆ Li yi ) / L. для площадей: xС = (∑ ∆ Fi xi ) / F: yС = (∑ ∆ Fi yi ) / F, где ∑ ∆ Fi xi - статический момент площади относительно оси х; ∑ ∆ Fi yi -статический момент этой площади относительно оси у. Если центр тяжести лежит на какой-либо оси, то соответствующий статический момент обращается в нуль. Если тело симметрично относительно некоторой точки, его центр тяжести совпадает с этой точкой. Если тело симметрично относительно некоторой оси, его центр тяжести лежит на этой оси. Если тело симметрично относительно некоторой плоскости, его центр тяжести лежит в этой плоскости. 18. Кинематика (дать понятия механического движения, времени траектории точки, системы отчета). Способы задания точек. Если точка, выйдя в некоторый начальный момент времени t=0 из начального положения Мо, переместилась сначала в положение M1, а затем в М2, то расстояние М0М2 называется перемещением точки, а арифметическая сумма M0M1 + M1M2 — ее путем. Кривая С, которую описывает точка М при своем движении называется ее траекторией. На траектории устанавливается начало отсчета О1 расстояние от которого по кривой в любой момент времени определяется законом движения по заданной траектории: s = f (t) Понятия о моменте пары сил.
Кручение. Правило знаков. кручением понимается такой вид нагружения, при котором в поперечных сечениях стержня возникает только крутящий момент Мк. Прочие силовые факторы (изгибающие моменты, нормальная и поперечные силы) равны нулю. Правило знаков для Мк - если наблюдатель смотрит на поперечное сечение со стороны внешней нормали и видит момент Мк направленным против часовой стрелки, то момент считается положительным. ЧИСТЫЙ ИЗГИБ Под чистым изгибом, понимается такой вид нагружения, при котором в поперечных сечениях стержня возникают только изгибающие моменты, a Q=0. Для тех участков стержня, где соблюдается это условие, изгибающий момент, остается постоянным М=const.
Коэффициент запаса. Учитывая свойства материала конструкции напряжение определяется по схеме σ mах = σ L/n где σ L - некоторое предельное для данного материала напряжение, n — число, большее единицы, называемое коэффициентом запаса или просто запасом. фактический коэффициент запаса: n = σ L/ σ mах Если этот запас удовлетворяет требованиям, считается, что поверочный расчет дал положительный результат. Выбор величины σ L чаще всего зависит от эксплуатационных требований.Если необходимо избежать заметных остаточных деформаций, за величину σ L для пластичных материалов принимается обычно предел текучести. Тогда наибольшее рабочее напряжение составляет n-ю долю от σ т или σ тр. Коэффициент в этом случае обозначается через nт и называется коэффициентом запаса по текучести. Для хрупких, а в некоторых случаях и для умеренно пластичных материалов за σ L принимается предел прочности σ вр или σ вс соответственно получаем nв= σ вр/ σ mах где nв — коэффициент запаса по пределу прочности. Если расчет ведется по предельной нагрузке, то аналогично может быть введено понятие запаса по предельной нагрузке n= PL/ Рраб где PL и Рраб -— предельная и рабочая нагрузки. Если расчет ведется на жесткость n= δ L/ δ раб; где δ L и δ раб — предельное и рабочее перемещения. Коэффициент Пуассона. Экспериментально установлено, что в пределах применимости закона Гука поперечная деформация пропорциональна продольной, ε попер=μ ε прод где μ —безразмерный коэффициент пропорциональности, называемый коэффициентом Пуассона. Величина μ характеризует свойства материала и определяется экспериментально. Для всех металлов числовые значения μ лежат в пределах 0, 25-0, 35 и вообще не может превышать 0, 5. Закон Гука. перемещения в определенных пределах пропорциональны действующим силам. Эта закономерность была дана Гуком в 1660 году в формулировке «каково удлинение, такова сила». Если рассмотреть перемещение произвольно взятой точки А по некоторому направлению, например по оси х, то UА= δ Х P где Р — сила, под действием которой происходит перемещение иА, а δ X — коэффициент пропорциональности между силой и перемещением Твердость. твердостью понимается способность материала противодействовать механическому проникновению в него посторонних тел. Понятно, что такое определение твердости повторяет, по существу, определение прочности. В материале при вдавливании в него постороннего тела возникают местные пластические деформации, сопровождающиеся при дальнейшем увеличении сил местным разрушением. Поэтому показатель твердости связан с показателями прочности и пластичности и зависит от конкретных условий ведения испытания. Путем проведения большого числа экспериментов создают переводную таблицу, при помощи которой можно приближенно по показателю твердости определить предел прочности материала. Таким образом, в результате пробы на твердость удается определить прочностные показатели материала, не разрушая детали. Опоры валов. Разновидность подшипников. Требования предъявляемые к подшипникам. На валах и осях размещают вращающиеся детали: зубчатые колеса, шкивы, барабаны и т. п. Вал отличается от оси тем, что передает вращающий момент от одной детали к другой, а ось не передает. Вал всегда вращается, а ось может быть вращающейся или невращающейся. Валы различают прямые, коленчатые и гибкие. Наибольшее распространение имеют прямые валы. Коленчатые валы применяют в поршневых машинах. Гибкие валы допускают передачу вращения при больших перегибах. По конструкции различают валы и оси гладкие и фасонные или ступенчатые, а также сплошные и полые.Образование ступеней связано с закреплением деталей на валу или самого вала в осевом направлении. Полыми валы изготовляют для уменьшения массы или когда через вал пропускают другую деталь, подводят масло. Классификация подшипников.Подшипники служат опорами для валов и вращающихся осей. Они воспринимают радиальные и осевые нагрузки, приложенные к валу, и сохраняют заданное положение оси вращения вала. Подшипники классифицируют по виду трения и воспринимаемой нагрузке. По виду трения различают: подшипники скольжения, у которых опорный участок вала скользит по поверхности подшипника; подшипники качения, у которых трение скольжения заменяют трением качения шариков или роликов. По воспринимаемой нагрузке различают подшипники: радиальные — воспринимают радиальные нагрузки; упорные — воспринимают осевые нагрузки; радиально-упорные — воспринимают радиальные и осевые нагрузки. Опорный участок вала называют цапфой. Форма рабочей поверхности подшипника скольжения, так же как и форма цапфы вала, может быть цилиндрической, плоской, конической или шаровой. Цапфу, передающую радиальную нагрузку, называют шипом, если она расположена на конце вала, и шейкой при расположении в середине вала. Цапфу, передающую осевую нагрузку, называют пятой, а опору подшипника — подпятником. Подпятники работают обычно в паре с радиальными подшипниками. Подшипники скольжения применяют очень широко, и в целом ряде конструкций они незаменимы. К таким подшипникам относятся: разъемные подшипники, необходимые по условиям сборки, например для коленчатых валов; высокоскоростные подшипники (v> 30 м/с), в условиях работы которых долговечность подшипников качения резко сокращается; подшипники прецизионных машин, от которых требуется особо точное направление валов и возможность регулировки зазоров; подшипники, работающие в особых условиях (воде, агрессивных средах и т. п.), в которых подшипники качения неработоспособны из-за коррозии; подшипники дешевых тихоходных механизмов и некоторые другие. В подшипниках скольжения материал вкладыша должен иметь: малый коэффициент трения и высокую сопротивляемость заеданию в периоды отсутствия режима жидкостного трения (пуски, торможение и т. п.); достаточную износостойкость наряду со способностью к приработке. Износостойкость вкладыша должна быть ниже износостойкости цапфы, так как замена вала обходится значительно дороже, чем замена вкладыша; достаточно высокие механические характеристики и особенно высокую сопротивляемость хрупкому разрушению при действии ударных нагрузок. Клиноременная передача.
Расчет резьбы на прочность Основные виды разрушения крепежных резьб — срез витков. В соответствии с этим основным критериями работоспособности и расчета для крепежных резьб являются прочность, связанная с напряжениями среза τ,
Условия прочности резьбы по напряжениям среза τ =F/(π d1 H K Km)≤ [τ ] для винта, τ =F/( π d H K Km) ≤ : [τ ] для гайки где: d и d1 наружный и внутренний диаметры резьбы; Н — высота гайки или глубина завинчивания винта в деталь; K=ab/p или К=се/р — коэффициент полноты резьбы; Кт — коэффициент неравномерности нагрузки по виткам резьбы. Если материалы винта и гайки одинаковы, то по напряжениям среза рассчитывают только резьбу винта, так как d1 < d. Классификация подшипников. Подшипники служат опорами для валов и вращающихся осей. Они воспринимают радиальные и осевые нагрузки, приложенные к валу, и сохраняют заданное положение оси вращения вала. Подшипники классифицируют по виду трения и воспринимаемой нагрузке. По виду трения различают: подшипники скольжения, у которых опорный участок вала скользит по поверхности подшипника; подшипники качения, у которых трение скольжения заменяют трением качения шариков или роликов. По воспринимаемой нагрузке различают подшипники: радиальные — воспринимают радиальные нагрузки; упорные — воспринимают осевые нагрузки; радиально-упорные — воспринимают радиальные и осевые нагрузки. Опорный участок вала называют цапфой. Форма рабочей поверхности подшипника скольжения, так же как и форма цапфы вала, может быть цилиндрической, плоской, конической или шаровой. Цапфу, передающую радиальную нагрузку, называют шипом, если она расположена на конце вала, и шейкой при расположении в середине вала. Цапфу, передающую осевую нагрузку, называют пятой, а опору подшипника — подпятником. Подпятники работают обычно в паре с радиальными подшипниками. Ядро сечения В окрестности центра тяжести существует область, называемая ядром сечения. Если сила Р приложена внутри ядра сечения, напряжения во всех точках сечения будут одного знака. Если сила приложена за пределами ядра сечения, нейтральная линия пересекает сечение, и напряжения в сечении будут как сжимающими, так и растягивающими. Когда точка приложения силы находится на границе ядра, нейтральная линия касается контура сечения. МУФТЫ Муфтами в технике называют устройства, которые служат для соединения концов валов, стержней, труб, электрических проводов и т. д. Соединение валов является общим, но не единственным назначением муфт. Муфты используют для включения и выключения исполнительного механизма при непрерывно работающем двигателе (управляемые муфты); предохранения машины от перегрузки (предохранительные муфты); компенсации вредного влияния несоосности валов (компенсирующие муфты); уменьшения динамических нагрузок (упругие муфты). Глухие муфты образуют жесткое и неподвижное соединение валов (глухое соединение). Они не компенсируют ошибки изготовления и монтажа, требуют точной центровки валов.Муфта втулочная — простейший представитель глухих муфт. Скрепление втулки с валами выполняют с помощью штифтов, шпонок) или зубьев (шлицев). Наибольшее распространение в качестве компенсирующих жестких муфт получили кулачково-дисковая и зубчатая. фланцевая муфта.
Статика. Основные положения. Сила, приложенная к точке, изображается вектором , равным по величине данной силе и направленным в сторону ее действия. Механической системой называется совокупность материальных частиц, в которой движение каждой частицы зависит от положения и движения остальных. Механическая система называется неизменяемой, если расстояние между каждыми двумя ее точками постоянно; в противном случае система называется изменяемой, или деформируемой. Твердым телом или точнее абсолютно твердым называется система, в которой при исследовании или изучении данного механического явления можно пренебречь взаимными смещениями частиц. Силу, не нарушая ее действия, можно в абсолютно твердом теле переносить в любую точку, лежащую на линии ее действия. Силы взаимодействия между частицами или телами системы называются внутренними; силы, действующие со стороны тел, не принадлежащих к системе, называются внешними. Системы сил, производящие на тело одно и то же действие, называются эквивалентными. Сила, эквивалентная системе сил, называется ее равнодействующей. Сила может быть сосредоточенной (если она приложена в одной точке) или распределенной (приложена по длине, поверхности или объему данного тела). Условия, стесняющие свободу движения механической системы, называются связями. Сила, заменяющая действие связи, называется реакцией связи. Реакции — силы пассивные; прочие силы (обычно задаваемые) называются активными. Связи реализуются в виде каких-то тел не входящих в изучаемую систему. (+ момент и пара сил). Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 501; Нарушение авторского права страницы

 (Рn)л +(РА)=0,
(Рn)л +(РА)=0,  Пара (N’, N" ) с моментом т смещает нормальную реакцию N в сторону движения на расстояние k. Если Q есть касательная составляющая реакции (вследствие вмятия), то при равномерном качении имеет место равновесие двух пар (P, Q) и (G, N’). Качение без скольжения имеет место, если fr> k.
Пара (N’, N" ) с моментом т смещает нормальную реакцию N в сторону движения на расстояние k. Если Q есть касательная составляющая реакции (вследствие вмятия), то при равномерном качении имеет место равновесие двух пар (P, Q) и (G, N’). Качение без скольжения имеет место, если fr> k. Наибольшая величина силы сухого трения пропорциональна нормальному давлению трущихся поверхностей друг на друга (закон Кулона): Tmax=fN ИЛИ T< =fN, где f — коэффициент трения скольжения (безразмерная величина). Величина f зависит от материала и качества обработки (а также и от температуры) трущихся поверхностей. В момент начала движения (Т= Tmax) коэффициент f имеет, наибольшее значение (статический коэффициент трения или коэффициент трения при покое), после чего сразу несколько уменьшается, изменяясь в дальнейшем со скоростью сравнительно мало. При этом для большинства материалов f при увеличении скорости уменьшается. Углом трения называется угол между полной реакцией и нормальной реакцией при Т= Tmax; обозначая его через φ , имеем: φ =arctg f.
Наибольшая величина силы сухого трения пропорциональна нормальному давлению трущихся поверхностей друг на друга (закон Кулона): Tmax=fN ИЛИ T< =fN, где f — коэффициент трения скольжения (безразмерная величина). Величина f зависит от материала и качества обработки (а также и от температуры) трущихся поверхностей. В момент начала движения (Т= Tmax) коэффициент f имеет, наибольшее значение (статический коэффициент трения или коэффициент трения при покое), после чего сразу несколько уменьшается, изменяясь в дальнейшем со скоростью сравнительно мало. При этом для большинства материалов f при увеличении скорости уменьшается. Углом трения называется угол между полной реакцией и нормальной реакцией при Т= Tmax; обозначая его через φ , имеем: φ =arctg f.


 Моментом пары называется произведение одной из сил пары на ее плечо т = Ph. Момент пары изображается вектором, перпендикулярным к плоскости действия пары и приложенным в любой точке. Парой сил называется совокупность двух численно равных параллельных сил, направленных в разные стороны. Расстояние h между линиями действия сил пары называется ее плечом. Пару нельзя заменить (а следовательно, и уравновесить) одной силой.
Моментом пары называется произведение одной из сил пары на ее плечо т = Ph. Момент пары изображается вектором, перпендикулярным к плоскости действия пары и приложенным в любой точке. Парой сил называется совокупность двух численно равных параллельных сил, направленных в разные стороны. Расстояние h между линиями действия сил пары называется ее плечом. Пару нельзя заменить (а следовательно, и уравновесить) одной силой. На грани АС в зависимости от угла α возможно возникновение как нормального, так и касательного напряжений. Обозначим их соответственно через σ α , τ α . Для их определения проецируем все силы, действующие на призму, на оси n и t. Условия равновесия дают следующие уравнения: σ α АС=τ АВ sin α + τ ВС cos α ; τ α АС= τ АВ cos α — τ BC sin α .Очевидно отрезки АВ и ВС связаны с АС соотношениями АВ=АС cos α , BC=AC sin α. Следовательно, σ α = τ sin2 α , τ α = τ cos2 α .При α =0 и α =90° напряжения σ α и τ α принимают значения, соответствующие исходным площадкам, т. е. σ α =0, τ α = τ. При α =±45°- τ α =0, а σ α =+-τ. Следовательно, если из пластины выделить прямоугольный элемент, грани которого повернуты относительно исходных плоскостей на угол 45°, то на секущих площадках будут обнаружены только нормальные напряжения, причем на одной паре граней эти напряжения растягивающие, а на другой — сжимающие.
На грани АС в зависимости от угла α возможно возникновение как нормального, так и касательного напряжений. Обозначим их соответственно через σ α , τ α . Для их определения проецируем все силы, действующие на призму, на оси n и t. Условия равновесия дают следующие уравнения: σ α АС=τ АВ sin α + τ ВС cos α ; τ α АС= τ АВ cos α — τ BC sin α .Очевидно отрезки АВ и ВС связаны с АС соотношениями АВ=АС cos α , BC=AC sin α. Следовательно, σ α = τ sin2 α , τ α = τ cos2 α .При α =0 и α =90° напряжения σ α и τ α принимают значения, соответствующие исходным площадкам, т. е. σ α =0, τ α = τ. При α =±45°- τ α =0, а σ α =+-τ. Следовательно, если из пластины выделить прямоугольный элемент, грани которого повернуты относительно исходных плоскостей на угол 45°, то на секущих площадках будут обнаружены только нормальные напряжения, причем на одной паре граней эти напряжения растягивающие, а на другой — сжимающие. 
 что совокупность точек, расположенных до изгиба в плоскости поперечного сечения стержня, после изгиба также образует плоскость, но переместившуюся и пространстве. Это утверждение, будучи точным для чистого изгиба, в общем случае является приближенным и именуется гипотезой плоских сечений.
что совокупность точек, расположенных до изгиба в плоскости поперечного сечения стержня, после изгиба также образует плоскость, но переместившуюся и пространстве. Это утверждение, будучи точным для чистого изгиба, в общем случае является приближенным и именуется гипотезой плоских сечений.
 Условно примем левое сечение за неподвижное. Тогда в результате поворота правого сечения на угол dθ верхние слои удлинятся, а нижние — укоротятся. Очевидно, существует слой, в котором удлинения отсутствуют. Назовем его нейтральным слоем. Отметим его отрезком CD. В результате поворота сечений изменение кривизны нейтрального слоя будет следующим: 1/ρ = dθ / dz Произвольно взятый отрезок AB=dz получит приращение длины А'В' — АВ. Так как сечения остаются плоскими, А'В' – АВ=(ρ +y)dθ - ρ dθ =y dθ где у — расстояние от рассматриваемого отрезка АВ до нейтрального слоя CD. Допустим, что положение этого слоя пока неизвестно. Относительное удлинение слоя АВ равно ε = y dθ / dz= y/ρ По закону Гука σ =E ε =E y/ρ. Таким образом, при чистом изгибе напряжения в поперечном сечении изменяются по линейному закону. Геометрическое место точек в сечении, удовлетворяющее условию σ =0, называется нейтральным слоем или нейтральной линией сечения. Нейтральная линия, очевидно, перпендикулярна к плоскости кривизны изогнутого стержня.
Условно примем левое сечение за неподвижное. Тогда в результате поворота правого сечения на угол dθ верхние слои удлинятся, а нижние — укоротятся. Очевидно, существует слой, в котором удлинения отсутствуют. Назовем его нейтральным слоем. Отметим его отрезком CD. В результате поворота сечений изменение кривизны нейтрального слоя будет следующим: 1/ρ = dθ / dz Произвольно взятый отрезок AB=dz получит приращение длины А'В' — АВ. Так как сечения остаются плоскими, А'В' – АВ=(ρ +y)dθ - ρ dθ =y dθ где у — расстояние от рассматриваемого отрезка АВ до нейтрального слоя CD. Допустим, что положение этого слоя пока неизвестно. Относительное удлинение слоя АВ равно ε = y dθ / dz= y/ρ По закону Гука σ =E ε =E y/ρ. Таким образом, при чистом изгибе напряжения в поперечном сечении изменяются по линейному закону. Геометрическое место точек в сечении, удовлетворяющее условию σ =0, называется нейтральным слоем или нейтральной линией сечения. Нейтральная линия, очевидно, перпендикулярна к плоскости кривизны изогнутого стержня.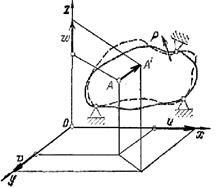 Очевидно, этот коэффициент зависит как от физических свойств материала, так и от взаимного расположения точки А и точки приложения силы. Таким образом, выражение следует рассматривать как закон Гука для системы. Коэффициенты пропорциональности в этом случае представляют собой физические константы материала и уже не связаны с геометрическими особенностями системы в целом. Закон, таким образом, выражает свойства самого материала. . γ α = 2 (1+μ ) τ α /Е. Это соотношение в случае изотропного материала является единым для всех типов напряженных состояний и носит название закона Гука для сдвига.
Очевидно, этот коэффициент зависит как от физических свойств материала, так и от взаимного расположения точки А и точки приложения силы. Таким образом, выражение следует рассматривать как закон Гука для системы. Коэффициенты пропорциональности в этом случае представляют собой физические константы материала и уже не связаны с геометрическими особенностями системы в целом. Закон, таким образом, выражает свойства самого материала. . γ α = 2 (1+μ ) τ α /Е. Это соотношение в случае изотропного материала является единым для всех типов напряженных состояний и носит название закона Гука для сдвига.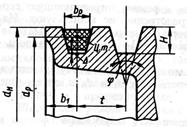 В передаче может быть один или несколько ремней. Несколько тонких ремней применяют взамен одного толстого для уменьшения напряжения изгиба. Форму канавки шкива выполняют так, чтобы между ее основанием и ремнем был зазор Δ. При этом рабочими являются боковые поверхности ремня. В то же время ремень не должен выступать за пределы наружного диаметра dн шкива, так как в этом случае кромки канавок быстро разрушают ремень. Расчетным диаметром dp шкива является диаметр окружности расположения центров тяжести поперечных сечений ремня или нейтрального слоя при изгибе — ширина bр. Все размеры, определяющие форму шкива (Н, φ, b1, t, dp, dн), выбирают по соответствующим таблицам стандартов в зависимости от размеров поперечного сечения ремня, которые также стандартизованы.( не весь.)
В передаче может быть один или несколько ремней. Несколько тонких ремней применяют взамен одного толстого для уменьшения напряжения изгиба. Форму канавки шкива выполняют так, чтобы между ее основанием и ремнем был зазор Δ. При этом рабочими являются боковые поверхности ремня. В то же время ремень не должен выступать за пределы наружного диаметра dн шкива, так как в этом случае кромки канавок быстро разрушают ремень. Расчетным диаметром dp шкива является диаметр окружности расположения центров тяжести поперечных сечений ремня или нейтрального слоя при изгибе — ширина bр. Все размеры, определяющие форму шкива (Н, φ, b1, t, dp, dн), выбирают по соответствующим таблицам стандартов в зависимости от размеров поперечного сечения ремня, которые также стандартизованы.( не весь.)



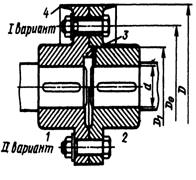 полумуфты 1, 2 соединяют болтами, поставленными с зазором (I вариант) или без зазора (II вариант). В первом случае крутящий момент передается силами трения, возникающими в стыке полумуфт от затяжки болтов, во втором случае — непосредственно болтами, работающими на срез и смятие.
полумуфты 1, 2 соединяют болтами, поставленными с зазором (I вариант) или без зазора (II вариант). В первом случае крутящий момент передается силами трения, возникающими в стыке полумуфт от затяжки болтов, во втором случае — непосредственно болтами, работающими на срез и смятие.