
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Моделирование системы управления электропривода с асинхронным двигателем. ⇐ ПредыдущаяСтр 5 из 5
Структурная схема замкнутой частотной системы с векторным управлением изображена на рисунке
В канале регулирования потокосцепления ротора, обычно,
Подсчитанный таким методом ПИ – регулятор компенсирует перекрестные связи в канале x. Для компенсации влияния перекрестных связей в канале y надо также выбрать ПИ -регулятор, обладающий передаточной функцией В такой случае передаточная функция замкнутого токового контура в канале y будет рассчитываться по следующему закону:
При компенсированных перекрестных связях канал y, который отвечает за момент, полностью аналогичен системе постоянного тока. Для того, чтобы придать этой системе свойство астатизма по скорости необходимо выбрать ПИ - регулятор скорости со следующей передаточной функцией:
Следовательно, передаточная функция системы по возмущению станет равна:
Провал скорости при приложении момента определится из формулы:
что может быть решающим при выборе коэффициента усиления регулятора скорости. Для моделирования системы управления асинхронным двигателем выберем АКЗ 20HP (15kW) из библиотеки Sim Power System с такими паспортными данными и параметрами: Коэффициенты: r = 0.4285 Ом; Ts = 0.0046 с; Tr= 0.2956 с; Kr= 0.9848; Ls= 0.00196 Гн.
Исследование модели асинхронной системы с частотно-векторным управлением.
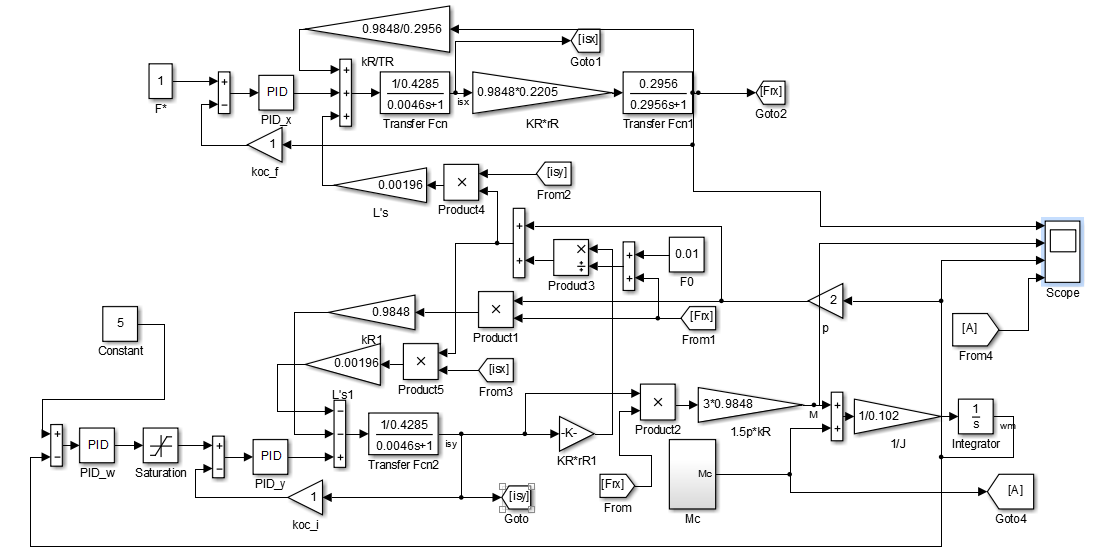
Исследование переходных процессов в модели системы с частотно-векторным управлением. Система обладает двумя каналами, один из которых определяет поток в машине, тогда как другой – момент. Синтез регуляторов при синтезировании подчиненной системы в каждом канале сделаем в соответствии с положениями, изложенными выше. В канале потока был выбран П регулятор с коэффициентом усиления Коэффициенты передач регуляторов выбираем таким образом, чтобы постоянная времени в канале управления потоком была бы по крайней мере на порядок меньше постоянной времени в канале управления скоростью. Модель электропривода, снабженная регуляторами скорости и потока, а также с некоторыми ограничениями, представлена на рисунке:
Рисунок 12 – Модель асинхронной системы с частотно-векторным управлением
Рисунок 13 – график работы системы при случайном воздействии.
Рассмотрим систему с регуляторами по частоте и току, на вход которой подадим ступенчатое воздействие.Результат представлен на рисунке
Рисунок 14 – Модель системы со ступеначатым входным сигналом.
Рисунок 15 – График работы системы при ступенчатом входном сигнале
На третьем графике показан переходной процесс, по которому видна величина перерегулирования (1.2), время переходного процесса около 0.1с.
Проведем исследование поведения системы при постоянной величине задания входного сигнала, для этого преобразуем модель асинхронного двигателя:
Введем в исходную систему нейрорегулятор NARMA L-2, а также передаточную функцию для анализа отработки системы входного воздействия в сравнении с эталоном.
Исследование переходных процессов в модели системы с частотно-векторным управлением при использовании нейрорегулятора NARMA L-2.
Регулятор NARMA-L2 Основная идея NARMA–L2 (Nonlinear Autoregressive – Moving Average (нелинейная авторегрессия со скользящим средним) состоит в представлении нелинейной системы в виде линейной модели [17]. Модель NARMA–L2 имеет следующий вид:
y(k+d)=N[y(k), y(k-1), …, y(k-n+1), u(k), u(k-1), …, u(k-n+1)] (3.6.18)
где y(k) – выход модели; d – число тактов предсказания; u(k) – вход модели. Если необходимо обеспечить соответствие выхода системы эталонному выходу y(k + d) = yr(k + d), то последующий шаг заключается в расчете нелинейного контроллера по следующему правилу:
u(k)=G[y(k), y(k-1), …, y(k-n+1), y_r (k+d), u(k-1), …, u(k-m+1)] (3.6.19)
Для того чтобы ИНС аппроксимировала функцию G с минимальной среднеквадратической ошибкой, надо использовать динамический алгоритм ее обратного распространения, приводящую к явной необходимости слишком большого объема вычислений. Решение подразумевает использование приближенной модели с выделенной составляющей управления. Такая модель, называемая NARMA–L2, имеет вид:
y (k+d)=f[y(k), y(k-1), …, y(k-n+1), u(k-m+1)]+g[y(k), y(k-1) , …, y(k-n+1), u(k-1), …, u(k-m+1)]u(k) (3.6.20)
Главное преимущество такой формы состоит в том, что сейчас текущее управление можно будет вычислить непосредственно, если нам известны желаемая траектория yr, также предыстория управления {u(k – 1), ..., u(k – m + 1)}, а также предшествующие и текущее значения выхода {y(k), …, y(k – n + 1)}:
где параметр предсказания d должен соответствовать условию d ≥ 2 [18]. Обобщенная структура системы с регулятором NARMA–L2 имеет вид, представленный на рисунке 3.36. На рисунке 3.37 показана структурная схема регулятора NARMA–L2 в MatLab.
Рисунок 3.36 - Структура регулятора на основе авторегрессии
Рисунок 3.37 - NARMA – L2 регулятор в MATLAB
На этапе идентификации генерируется модель управляемого процесса в форме ИНС, которая потом используется для синтеза регулятора. Схема идентификации управляемого процесса приведена на рисунке 3.37, она содержит в себе модель управления в виде ИНС, которая должна быть обучена в автономном режиме так, чтобы минимизировать ошибку между выходами объекта и модели: e = yp – ym для последовательности пробных входных сигналов u. Для идентификации применяется двухслойная ИНС с линиями задержки (рис. 3.38). Модель использует предыдущий вход и предыдущий выход объекта для предсказания его будущего выхода. Для идентификации применяется двухслойная ИНС с линиями задержки (рис. 3.38). Модель использует предыдущий вход и предыдущий выход объекта для предсказания его будущего выхода.
Рисунок 3.37 - Общая схема нейросетевой идентификации
Рисунок 3.38 - Идентификационная нейронная сеть
При управлении с предсказанием модель управляемого процесса в виде ИНС используется для предсказания его будущего поведения, а алгоритм оптимизации применяется для расчета такого внутреннего управления, которое будет минимизировать разность между желаемым и действительными изменениями выхода модели. Контроллер, иполняющий такой регулятор, требует большого объема вычислений, потому как для расчета оптимального закона управления оптимизация исполняется на каждом такте управления [19]. Процедура идентификации нейроконтроллера требует задания следующих параметров: · Size of Hidden Lauer – размер скрытого слоя определяется количеством используемых нейронов; · Sampling Interval – такт дискретности в секундах между двумя последовательными моментами съема информации; · No. Delayed Plant Inputs – количество элементов запаздывания на входе модели; · No. Delayed Plant Outputs – количество элементов запаздывания на выходе модели; · Normalize Training Data – окно контроля нормирования обучающих данных к диапазону [0 1]. · Параметры обучающей последовательности: · Training Samples – длина обучающей выборки (количество точек съема информации); · Maximum Plant Input – максимальное значение входного сигнала; · Minimum Plant Input – минимальное значение входного сигнала; · Maximum Interval Value (sec) – максимальный интервал идентификации в секундах; · Minimum Interval Value (sec) – минимальный интервал идентификации в секундах; · Limit Output Data – окно контроля, позволяющее ограничить объем выходных данных (только при включенном окне контроля будут доступны два следующих окна редактирования текста); · Maximum Plant Output – максимальное значение выходного сигнала; · Minimum Plant Output – минимальное значение выходного сигнала; · Simulink Plant Model – задание модели Simulink с указанием входных и выходных портов, используемых при нейросетевой модели управляемого процесса; Параметры обучения: · Training Epochs – количество циклов обучения; · Training function – задание обучающей функции; · Use Current Weights – окно контроля, позволяющее подтвердить использование текущих весов нейронной сети; · Use Validation/Testing for Training – выбор этих окон контроля означает, что 25 % данных из обучающей последовательности будет использовано для формирования контрольного и тестового множеств соответственно. Запуск процедуры Generate Training Data приведет к тому, что будет запущена программа создания обучающей последовательности на интервале «Training Samples»/«Sampling Interval» секунд для модели объекта управления. При этом программа создает обучающие данные путем воздействия ряда случайных ступенчатых сигналов на модель Simulink управляемого процесса. Графики входного и выходного сигналов объекта управления показываеются на экране. По завершении генерации обучающей последовательности пользователь может сделать выбор и отказаться от сгенерированных данных (Reject Data) или их принять (Accept Data). Параметры настройки регулятора NARMA-L2:
Рисунок 3.39 - Окно настройки параметров регулятора NARMA-L2
После выполнения операции идентификации часть окон недоступны, а кнопка Generate Training Data заменена кнопкой Erase Generated Data, что позволяет удалить сгенерированные данные. В окне фрейма содержится сообщение: «Обучающая последовательность состоит из 2000 замеров. Можно начинать обучение нейронной сети». Для обучения нейронной сети следует воспользоваться кнопкой Train Network (обучить сеть). Начнется обучение нейросетевой модели. Текущее состояние отмечено в окне Plant Identification сообщением «Обучение завершено. Можно сгенерировать или импортировать новые данные, продолжить обучение или сохранить полученные результаты, выбрав кнопки OK или Apply». В результате параметры нейросетевой модели управляемого процесса будут введены в блок NN NARMA - L2 – Controller системы Simulink.
Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 755; Нарушение авторского права страницы
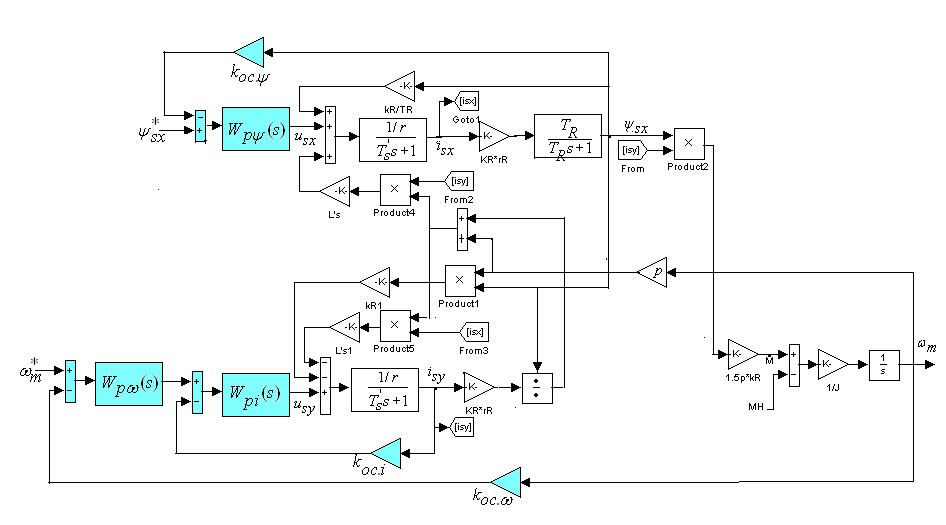 Рис.Структурная схема замкнутой асинхронной системы с векторным управлением
Рис.Структурная схема замкнутой асинхронной системы с векторным управлением
 , поэтому в роли регулятора потокосцепления логично выбрать ПИ – регулятор, обладающий следующей передаточной функцией
, поэтому в роли регулятора потокосцепления логично выбрать ПИ – регулятор, обладающий следующей передаточной функцией  , тогда для исполнения в этом канале оптимума по модулю коэффициент усиления регулятора высчитывается из уравнения:
, тогда для исполнения в этом канале оптимума по модулю коэффициент усиления регулятора высчитывается из уравнения: 
 .
. при
при  .
.
 при
при 
 ,
,  Гц,
Гц,  Ом.,
Ом.,  Ом.,
Ом.,  Гн,
Гн,  Гн, J= 0.102 кгм
Гн, J= 0.102 кгм  , p=2.
, p=2. , в канале скорости синтезирован ПИ регулятор с параметрами
, в канале скорости синтезирован ПИ регулятор с параметрами  .
.




 (3.6.21)
(3.6.21)



