|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Компьютерный дизайн технологического оборудования
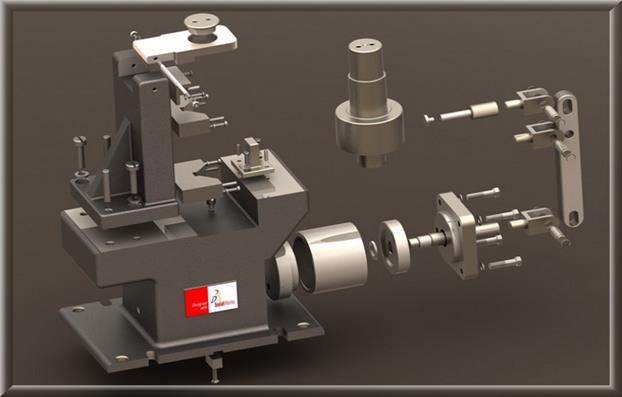
Современная концепция автоматизации проектирования и производства предполагает повсеместное внедрение новых промышленных стандартов, основанных на комплексном использовании компьютерного моделирования. Применение электронных моделей обеспечивает не только существенное ускорение процессов разработки новых образов продукции, но и ощутимое повышение их качества за счет снижения ошибок и увеличения точности расчетов. Часто называемое компьютерным инжинирингом прикладное компьютерное моделирование позволяет отказаться от длительных и опасных натурных испытаний, дорогостоящих материальных моделей. В настоящее время на передовых промышленных предприятиях активно внедряется методология управления жизненным циклом изделий (CALS/ИПИ/PLM), которая официально принята на уровне международных и российских стандартов и предполагает создание единого информационного пространства [3]. Красивый, эффективный, глубоко продуманный и рассчитанный дизайн технологического оборудования - залог преемственности и повышения эффективности производственных процессов. На рисунках (6.1-6.7) представлены модели победителей в различных номинациях на конкурсе «Компьютерный дизайн технологического оборудования» среди студентов технических Вузов.
Рис.6.1. Колесо крановое
Рис. 6.2. Шпиндель
Рис. 6.3. Приспособление станочное зажимное автоматическое
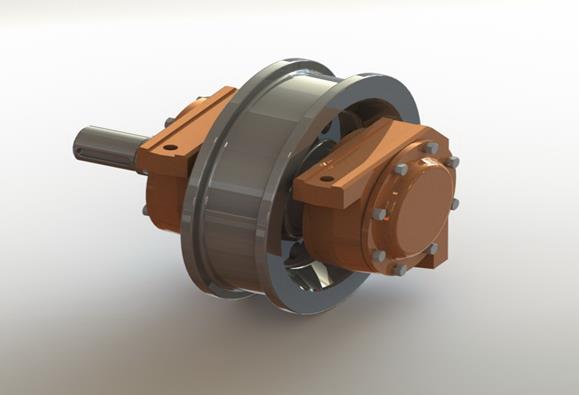
Рис. 6.4. Правый поворотный редуктор очистного комбайна 1ГШ68
Рис.6.5. Колесо крановое Рис. 6.6. Правый поворотный редуктор очистного комбайна 1ГШ68
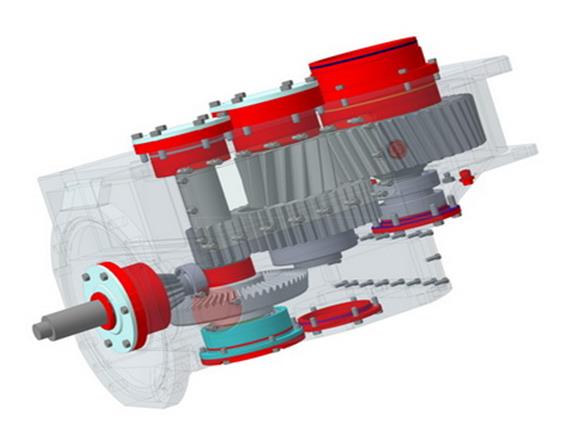
Рис. 6.7. Коническо-цилиндрический редуктор Контрольные вопросы 1.Требования безопасности при проектировании технологического оборудования. 2. Эргономические требования к производственному оборудованию. 3.Что представляет собой дизайн технологического оборудования в современном мире? Приведите примеры.
7. Построение математической модели и проверка её на адекватность на примере электрогидравлического привода
Рассмотрим построение математической модели изделия на конкретном примере, а именно на примере электрогидравлического привода. Электрогидравлические приводы с дроссельным регулированием широко применяются в различных областях техники для получения вращательных и поступательных движений звеньев механизмов. Исполнительным двигателем в таком приводе может быть гидроцилиндр или гидромотор. Управление ими осуществляется при помощи сервораспределителей или распределителей с пропорциональным управлением. Дроссельное регулирование дает широкие возможности для реализации различных законов управления, создания следящих систем, замкнутых обратной связью по координате (углу поворота или перемещению) или скорости (линейной или угловой). В случае с электрогидравлическими приводами часто встают задачи синтеза регулятора, отработки специального закона управления [4]. Эти задачи на первом этапе решаются на математических моделях приводов. В связи этим актуальным становится вопрос адекватности математической модели. Физические процессы, протекающие при работе электрогидравлических приводов, в математической модели описываются системой алгебраических и дифференциальных уравнений. В зависимости от решаемой задачи необходимо выбирать степень приближения модели к действительности. Чем точнее требуется описать процесс или явление, тем больше численных значений параметров разного рода нужно знать, будь то характеристики материалов, точность изготовления отдельных элементов и т.д. В тех случаях, когда стоит задача оптимизации имеющегося устройства, большая часть параметров системы априори известна. Однако, даже имея готовый работоспособный агрегат, не всегда удается путем непосредственных измерений получить численные значения всех интересующих параметров. В электрогидравлических приводах одним из таких проблемных мест является описание электрогидравлических усилителей мощности (ЭГУ). В следящих электрогидравлических приводах часто применяют двухкаскадные ЭГУ золотникового типа. Рассмотрим электрогидравлический привод вращательного движения, схема которого изображена на рисунке 7.1. Коленчатый вал 1 приводится во вращение двумя гидроцилиндрами 3 через шатуны 4. Согласованная работа цилиндров обеспечивается подачей специальных сигналов на два электрогидравлических усилителя (на схеме не показаны), выходы которых соединены с полостями цилиндров. На качество характеристик такого привода большое влияние оказывает качество исполнения ЭГУ, в том числе точность изготовления золотника. При составлении математической модели необходимо качественно и количественно описать золотниковые пары ЭГУ.
Рис. 7.1. Схема электрогидравлического привода вращательного движения Основными параметрами точности изготовления цилиндрического золотникового распределителя являются: S – перекрытия кромок; R – радиусы скругления кромок; δ – радиальный зазор в паре золотник-гильза. Схема цилиндрического золотникового распределителя приведена на рисунке 7.2. Параметры R и δ являются приблизительно одинаковыми для всех рабочих кромок. Параметр S может достаточно сильно варьироваться в силу технологии изготовления. Поэтому при составлении математической модели следует учесть индивидуальный закон открытия каждой из дросселирующих щелей золотникового распределителя.
Рис. 7.2. Схема цилиндрического золотникового распределителя Расчетная схема, принятая для составления математической модели, приведена на рисунке 7.3.
Рис. 7.3. Расчетная схема
1. Уравнения, описывающие электрогидравлические усилители. ЭГУ представлены дифференциальным уравнением первого порядка согласно [4]
где Тгу – постоянная времени гидроусилителя; Xз1 и Xз2 – смещения золотников первого и второго ЭГУ; Кгу– коэффициент усиления; U1 и U2 - входные сигналы ЭГУ:
где j – текущий угол поворота вала; jз – заданный угол поворота вала. Методы формирования управляющих сигналов U1 и U2 описаны в [5]. Смещение золотника ограничивается неравенствами: - - где X3max – максимальное смещение золотника. Из-за наличия неточности изготовления золотников величина открытия дросселирующих щелей не равна смещению золотника
где
R – радиус скругления кромок; δ – радиальный зазор в паре золотник-гильза; Sn– перекрытия кромок.
2. Расходы через кромки золотниковых распределителей. Q Q Q Q где pп – давление питания в системе; pc – давление в сливе системы; pAi – давлениев полости “A” i–го цилиндра; pBi– давлениев полости “B” i –го цилиндра; QнAi– расход из линии нагнетания в полость “A” i–го цилиндра; QcAi– расход из полости “A” i–го цилиндра в линию слива; QнBi - расход из линии нагнетания в полость “B” i–го цилиндра; QcBi – расход из полости “B” i–го цилиндра в линию слива; Ϭ – проводимость щели золотникового распределителя определяем по формуле:
где µ – коэффициент расхода щели; b – ширина окон в гильзе золотникового распределителя; n– количество окон в гильзе золотникового распределителя у каждой кромки; p– плотность рабочей жидкости. 3. Расходы через обратные клапаны составляют.
0, если
0, если
0, если
0, если
где QКЛ.Н.Ai – расход из полости “A” i–го цилиндра в линию нагнетания через обратный клапан; QКЛ.C.Ai – расход из линии слива в полость “A” i–го цилиндра через обратный клапан; QКЛ.Н.Bi – расход из полости “B” i–го цилиндра в линию нагнетания через обратный клапан; QКЛ.C.Bi – расход из линии слива в полость “B” i–го цилиндра через обратный клапан; Ϭ КЛ.Н – проводимость обратного клапана в линию нагнетания; Ϭ КЛ.С – проводимость обратного клапана из линии слива. 4. Уравнения баланса расходов, приведенные к форме Коши.
где Е – приведенный модуль упругости жидкости; VAi – объем сжатия в полости “A” i–го цилиндра; VBi – объем сжатия в полости “B” i–го цилиндра; XПi – смещение поршня i–го цилиндра; SП – площадь поршня. 5. Сила, развиваемая поршнем гидроцилиндра.
где FТРi – суммарная сила сухого и вязкого трения. FТРi =
где FK – сила Кулоновского трения; FСТР – сила страгивания; KВ.ТР – коэффициент вязкого трения; υ ПОР – пороговое значение скорости. 6. Движущий момент привода. Момент от поршня одного гидроцилиндра рассчитывается исходя из кинематики механизма с учетом шатунного влияния.
где L – длина шатуна. 7. Уравнение движения нагрузки (приведенное к форме Коши).
где J – приведенный к валу момент инерции; МН – внешний нагружающий момент. 8. Уравнения кинематической связи.
Решение уравнений математической модели проводилось численным методом при помощи алгоритма, реализованного на языке программирования C++ [6]. Численные значения параметров в системе СИ приведены в таблице 7.1.
Теперь перейдем к идентификация параметров математической модели. Величины перекрытий в паре «золотник-гильза», входящие в уравнения математической модели, изначально неизвестны. Непосредственно измерить их также не представляется возможным. В таком случае для их определения целесообразно воспользоваться предлагаемым методом идентификации. Для этого необходимо определяемые величины представить набором варьируемых параметров S = {S1, S2, …, S8}. Также нужно выбрать критерий несоответствия ∆ математической модели и моделируемого объекта. Идентичность модели и объекта будет достигнута при обеспечении минимума критерия ∆ на множестве параметров S. Таким образом, метод идентификации параметров представляет собой задачу многомерной оптимизации.
Таблица 7.1 Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 666; Нарушение авторского права страницы





 ,
, 
 ,
, 
 ,
, 


 ,
, 
 – номер ЭГУ
– номер ЭГУ – открытие щели под номером k i-го распределителя (см. схему на рисунке 7.2);
– открытие щели под номером k i-го распределителя (см. схему на рисунке 7.2);  – вспомогательные величины:
– вспомогательные величины: 









 ,
,  ,
,  QКЛ.Н.Ai =
QКЛ.Н.Ai =  если
если 

 QКЛ.C.Ai =
QКЛ.C.Ai =  если
если 

 QКЛ.Н.Bi =
QКЛ.Н.Bi =  если
если 

 QКЛ.C.Bi =
QКЛ.C.Bi =  если
если 
 ,
, 
 ,
,  ,
,  ,
, 
 ,
,  – длина кривошипа;
– длина кривошипа;  ,
,