
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Общее описание пакета OrthoMapСтр 1 из 6Следующая ⇒
ORTHOMAP Версия 1.33 Руководство пользователя Содержание
ВведениеIDH_Intro Общее описание пакета OrthoMapIDH_Gener Требования к аппаратным и программным средствамIDH_Req Инсталляция и запуск OrthoMapIDH_Inst РегистрацияIDH_Reg Стандартная последовательность действий для создания ортофотоIDH_Seq Метод коррекции систематических ошибок при создании ортофотоIDH_Meth Работа с программой Основное менюIDH_MMenu Создание проектаIDH_Crea Открытие существующего проектаIDH_Open Импорт опорных точекIDH_ImpGCP Просмотр изображенийIDH_Preview Окно проекта Задание рабочих файловIDH_SetW Задание параметров камерыIDH_Camera Задание координатной системы и метода интерполяции пикселовIDH_CoordS Задание размера и расположения ортофото (AOI)IDH_Loc Задание положения топоцентрической системыIDH_Topo Задание модели камерыIDH_Model Задание направления координатной системы снимкаIDH_Direct Окно внешнего ориентирования, окна снимка и картыIDH_Exterior Общее описаниеIDH_General Редактирование существующей точкиIDH_Edit Внешнее ориентированиеIDH_Ext Трансформирование снимковIDH_Ortho Утилиты Координатный калькуляторIDH_Ccalc Утилита ReprojectIDH_Reprj Импорт ЦМР из текстового (ASCII) файла – одна высота в строкеIDH_Imp Импорт ЦМР из текстового (ASCII) файла – одна строка ЦМР в строкеIDH_ImpLine Импорт ЦМР из текстового (ASCII) файла – значения XYZ в строкеIDH_ImpXYZ Экспорт ЦМР в текстовый (ASCII) файлIDH_Exp Утилита FlipIDH_Flip Форматы файлов Форматы входных файловIDH_Inp Формат выходного ортофотоIDH_Out Формат файла заголовка OSDIDH_Osd Формат файла опорных точек GCPIDH_Fgcp Формат файла опорных точек PTSIDH_Pts Коды ошибок OrthoMapIDH_Abn Техническая поддержкаIDH_Supp
(c) 2004-2009 Vinek Software Введение
Пакет программ OrthoMap позволяет обрабатывать снимки, полученные следующими камерами(спутниками): · КВР-1000, · TK-350, · КФА-1000, · MK-4, · Ресурс ДК1 · Landsat TM · IKONOS · IRS-1C · Spot 1, 2, 3 · QuickBird · ALOS (PRISM) · аэрокамерами
Пакет OrthoMap позволяет создавать следующие типы геопривязанных(хотя бы одна точка изображения имеет геодезическую координату и оси снимка параллельны осям геодезической системы координат) изображений: · Ортотрансформированные изображения – если используется Цифровая Модель Рельефа (ЦМР); · Геометрически корректированные изображения ( ортотрансформированные на плоскость с одной высотой ) – если используется одна заданная высота для обработки всех точек изображения; · Трансформированные изображения – если используется полиномиальная модель для трансформирования изображения; · Гео привязанные изображения (без трансформирования)
Для создания ортотрансформированных изображений необходимо иметь следующие исходные данные: · ЦМР на всю территорию, которая должна быть обработана; · Набор опорных точек; · Исходное изображение
Для создания геометрически корректированных изображений необходимо иметь следующие исходные данные: · Средняя высота для всей области обработки; · Набор опорных точек · Исходное изображение
Для создания трансформированных изображений необходимо иметь следующие исходные данные: · Набор опорных точек · Исходное изображение. Пакет OrthoMap включает в себя следующие модули: · основной модуль Omap для осуществления внешнего ориентирования; · модуль ортотрансформирования Rectify; · утилиты для импорта/экспорта ЦМР.
Следующие модули могут использоваться в Orthomap дополнительно: · Модуль Reproject для трансформирования растровых данных (снимков, ЦМР) в требуемую картографическую проекцию; · Программа Coordinate Calculator для перевычисления опорных точек в требуемую картографическую проекцию.
Общее описание пакета OrthoMap
Процесс создания ортотрансформированного изображения организован в форме проекта IDH_Crea. Файл проекта содержит имена рабочих файлов, параметры ориентирования, параметры координатных систем и другие рабочие параметры.
Программа OrthoMap обрабатывает данные в следующих координатных системахIDH_CoordS: Проекция Гаусса-Крюгера на эллипсоиде Красовского и проекция UTM на эллипсоиде WGS-84. Внешнее ориентирование выполняется в локальной топоцентрической системе. Топоцентрическая система – это локальная прямоугольная координатная система с началом в заданной точке на земном эллипсоидеIDH_Topo. Она используется для увеличения точности ориентирования снимка. В большинстве случаев рекомендуется задавать начало топоцентрической системы в центре масс опорных точек (галочка Auto topocentric включена во умолчанию) или в центре рабочей области, используя соответствующую функцию пакета. В файле проекта сохраняется точка начала топоцентрической системы и её азимут относительно направления на Север; азимут связан с направлением полета спутника.
Для хранения координат опорных точек используется специальный файл Опорных точек (GCP)IDH_FGCP. Имя этого файла совпадает с именем файла проекта но имеет расширение ‘.gcp’. Этот файл содержит геодезические координаты опорных точек и их пиксельные координаты на исходном изображении может быть импортирован из внешнего файла. Все координаты (опорные точки, точки привязки изображения и т.п. ) вводятся в выбранной системе координат (WGS/UTM или Красовский/Гаусс, если необходимо, используйте программу Coordinate CalculatorIDH_CCalc для пересчета координатo) и автоматически пересчитываются в топоцентрическую систему при ориентировании. ОриентированиеIDH_Ext может быть выполнено с использованием следующих моделей: геометрическая модель снимка, основанная на законе центральной проекции (Frame-Кадр), простая панорамная модель снимка (Simple Panoramic – рекомендуется для большинства космических снимков ), статическая панорамная модель снимка (Panoramic Static), динамическая панорамная модель (Panoramic Dynamic), конформная – Polynomial (Conformal) и афинное преобразование - Polynomial (Affine). В процессе ориентирования определяются координаты точки фотографирования, углы наклона и другие параметры ориентирования.
После определения параметров ориентирования выполняется трансформирование исходного изображения. Если задана ЦМР, то производится точное ортотрансформирование с учетом высоты поверхности для каждого пиксела. В этом случае точность результирующего изображения определяется точностью ЦМР, опорных точек и точностью их определения на снимке (при использовании GPS точек, для снимков КВР-1000 достижима точность 2-3 метра). Если ЦМР не задана, производится трансформирование с использованием средней высоты. Этот метод геометрической коррекции позволяет получить хороший результат для плоских областей.
Требования к аппаратным и программным средствам
Программное обеспечение разработано как 32-битное приложение для ОС Windows 95/98/NT/2000/XP (не для DOS/Windows 3.1) на аппаратной платформе x86.
Минимальные требования к аппаратным средствам: · Pentium 90; · 64 Mб ОЗУ; · 50 Mб на жестком диске;
Рекомендуемая конфигурация: · Pentium II - 400 или выше; · 1 Гб ОЗУ или больше; · свободное место на диске 2 Гб или больше. Установка и запуск программы «OrthoMap»
1. Для установки программы «OrthoMap» запустите программу SETUP.EXE. Для инсталляции вам необходимо указать место на жестком диске где будет установлена программа. По умолчанию программа «OrthoMap» устанавливается в директории “ Program Files\VinekSoft\Omap1.33”. 2. Запуск программы осуществляется из меню Start-> Programs-> Vinek Software-> OrthoMap 1.33-> OrthoMap. Для удобства работы можно сделать ссылку на программу с помощью программы Windows Explorer (на файле Omap.exe правая клавиша мыши-> Create Shortcut). Регистрация программы
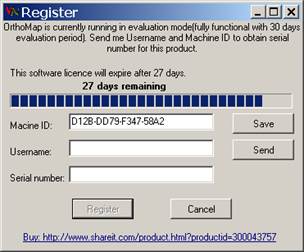
Программа распространяется как shareware – это значит, что она условно бесплатная. Вы можете пользоваться данной программой в течение ознакомительного периода (14 дней). В это время программа позволяет использовать все функции без ограничения. После окончания ознакомительного периода программа сможет использовать только четыре эллипсоида с соответствующими датумами и проекциями. По истечении этого периода вы можете купить программу или удалить (деинсталлировать) её с вашего компьютера. Программа регистрируется для использования только на одном компьютере, точнее одной аппаратной конфигурации. При установке программы на другом компьютере необходима новая регистрация (соответственно и оплата). Если вы хотите зарегистрировать программу вам следует выполнить следующие действия: 1. Послать мне (vinek@yahoo.com, vinek@list.ru) Machine ID(код, однозначно определяющий компьютер) и Username (имя пользователя) (Machine ID вы можете взять в окне Register, имя пользователя придумайте сами). Вы можете сохранить эту информацию в текстовом файле (кнопка Save) и прикрепить её к письму, или нажать кнопку Send – информация будет послана с помощью почтовой программы, установленной по умолчанию.
2. После оплаты получить серийный номер от меня. Я вышлю его вам в течение 5 рабочих дней (обычно гораздо быстрее). Вы можете получить регистрацию программы и бесплатно, например, на условиях тестирования или других условиях, для этого свяжитесь со мной (vinek@yahoo.com vinek@list.ru). 3. Введите серийный номер и имя пользователя в соответствующие поля окна Register и нажмите кнопку Register
Работа с программой Основное менюIDH_MMenu
Основное меню содержит следующие пункты:
" File " – функции управления проектом (Открыть, Создать, Сохранить): " New Project " – создает новый проект; " Open Project " – открывает существующий проект; “ Import points ” – импорт опорных точек в (GCP) проект; " Preview " – вы можете просмотреть любой снимок в поддерживаемом формате; “ Open Map ” – открыть изображение карты – этот пункт доступен после открытия окна основного изображения в процессе внешнего ориентирования; " Save Project " – сохранить текущий проект; " Save As " – сохранить текущий проект с другим именем; " Info " - показывает информацию о проекте; " Save Info " – сохраняет информацию о проекте в файле; " Print Info " – печатает информацию о проекте на принтере по умолчанию; " Exit " - выход из программы.
" Edit " – редактирование проекта, задание параметров проекта: " Coordinate System " - открывает окно проекта на странице «Выходная координатная система»Output CS pageIDH_CoordS; " Camera " - открывает окно проекта на странице «Камера» camera pageIDH_Camera; " Topocentric System " - открывает окно проекта на странице «Топоцентрическая система» topo pageIDH_Topo; " Ortho Image Location " - открывает окно проекта на странице «Область интереса» AOI location pageIDH_Loc; " Resampling Type " - открывает окно проекта на странице «Выходная координатная система» Output CS pageIDH_CoordS; " Задать исходное изображение"; " Задать выходное ортоизображение"; " Задать ЦМР"; " Задать опорные точки"; " Ориентация снимка"
“ Window ” “ Arrange all windows ” - позиция по умолчанию для всех окон программы
" View " " Preview " – открывает диалог выбора изображения для предпросмотра;
" Process " – процессы ориентирования и трансформирования снимка; " Orientation " – внешнее ориентирование снимка; " Rectification (Ortho) " – ортотрансформирование снимка; " Registration " – регистрация снимка без трансформирования; " Simple Registration " – регистрация сникм только по X, Y, без поворота.
" Utilities " – меню различных утилитIDH_Utils, пользователь может настроить это меню " Orthorectification " – предопределенная утилита для трансформирования " Import DEM from XYZ file " – предопределенная утилита для импорта ЦМР " Import DEM from line формат " – предопределенная утилита для импорта ЦМР " Import DEM from one Z on line " – предопределенная утилита для импорта ЦМР " Help " – система контекстной подсказки.
Создание проекта
После старта программы в главном меню/File доступны только два пункта: " New Project " -новый проект и " Open Project " открыть проект. Выберите " File " из главного меню, выберите " New Project " (или нажмите кнопку " New Project "
Примечание: проект создается в оперативной памяти. Для сохранения его на диске выберите " Save Project" или " Save as" из меню " File" (или используйте кнопки " Save Project" Открытие существующего проекта
Выберите " Open project " из меню " File " или используйте кнопку " Open project "
Примечание: проект создается в оперативной памяти. Для сохранения его на диске выберите " Save Project" или " Save as" из меню " File" (или используйте кнопки " Save Project"
Импорт опорных точек
Опорные точки (GCP) для проекта сохраняются в файле с именем проекта и расширением ‘.gcp’ -< projectname>.gcp, формат этого файла описан в разделе “Формат of GCP файлаIDH_Fgcp” Вы можете ввести опорные точки вручную или набрать их с растровой карты в процессе внешнего ориентированияIDH_Ext. Или если вы имеете отдельный файл опорных точек в формате GCPIDH_Fgcp вы можете импортировать их в проект. Выберите " Import points " из меню " File ". Затем выберите необходимый файл формата gcp с помощью стандартного диалога.
Просмотр изображений
Выберите " Preview" из меню " File". Затем с помощью стандартного диалога выберите необходимый файл изображения. Можно просмотреть файлы следующих форматов: *.OSD, *.BMP, *.TIF, *.JPEG, *.ERS, *.DTM. После выбора изображений откроется окно просмотра.
Окно просмотра
Окно просмотра содержит следующие кнопки:
In the title of window X, Y pixel coordinates of an image point are shown.
Редактирование проекта Задание рабочих файлов
Select item " Define Raw Image " from " Edit " menu to define source image file using common " Open file" dialog. Or you can click line “ Input file ” on page “ Files ”.
Select item " Define Ortho Image " from " Edit " menu to define name and directory path of output orthoimage file. Or you can click line “ Output file ” on page “ Files ”.
Select item " Define DEM " from " Edit " menu to define DEM file name (not used for transформатion to mean plane) using common " Open file" dialog, also can be used to remove the DEM from the project. Or you can click line “ DEM file ” on page “ Files ”.
On this page you can define Project title and give some Comments for this project.
If you have control points in separate GCP file, then you can import them into project. Select item " Import points " from " File " and select file name using common " Open file" dialog. When you save project, control points will be saved in file with name of project file and ‘.gcp’ extention. The GCP file contains inформатion determining location of each control point on image in pixel coordinates and on the ground in geographic coordinates. GCP file формат described in section " Форматs of Files" IDH_Fgcp.
Задание параметров камеры
Select " Camera" from " Edit" menu. Camera parameters setting window is displayed.
Select camera type from " Camera type " listIDH_INTRO. Then the parameters " Focus ", " Aperture " and " Altitude of flight " are automatically set for selected camera type. Each parameter can be changed separately. For other cameras select camera type " Unknown" then enter the camera parameters manually.
The required parameters are the following: · Focus - camera focal length (in millimeters); · Aperture - scanning aperture (in microns per pixel); · Altitude of flight - average altitude of shooting (in kilometers).
To save the changes in camera parameters, save active project (see Note to the section " Opening an existing project" IDH_Open above). To discard changes press " Cancel" button.
Задание координатной системы и метода интерполяции пикселовIDH_CoordS
Select " Coordinate system " from " Edit " menu, then select required coordinate system from two available (Gauss-Kruger on Krasovsky spheroid or UTM on WGS-84 spheroid). Or you can simply click on lines “ Spheroid ”, “ Datum ”, “ Projection ” and coordinate system changes.
Select " Resampling type " item from " Edit " menu, then select necessary pixel resampling type from the list. Current resampling type is marked in the list. The best choice for “black and white” imagery is “ Bilinear interpolation ”, but it can change colours for multispectral (RGB) images. " Nearest neighbour " resampling method is faster and does not change colour of RGB images.
Note. All coordinates in the system are to be specified with zone number as first digits in Easting coordinate. For example: 12356800 – 12 zone 356800- coordinates in zone
Задание положения и размера ортоизображения
To set location and size of orthoimage select item " Ortho Image Location " from " Edit " menu.
Output orthoimage is oriented along Easting/Northing axes of specified coordinate system, so orthoimage location is determined by one point - North-West corner of orthoimage corresponding to output file coordinates 0: 0 (upper left corner of the output image). For transформатion of the image to mean plane of the required area average height of the area must be specified.
Attention! Average height is also used for the pixels of the required area beyond DEM area. It may lead to image distortions at the DEM / average height border area if difference in heights is significant. To avoid this, control orthoimage and DEM area sizes carefully.
Orthoimage size and grid step are specified in meters.
To process the whole input image use " All Image " button. In this case the coordinates of North-West corner, output pixel size corresponding to input pixel size and orthoimage size corresponding to the whole input file are determined from the parameters of exterior orientation corresponding to the set of ground control points. These values are used as orthoimage location.
To process the image within DEM borders use " DEM " button.
Use " From GCP " button to define the mean plane with the height determined as average of the heights of control points. Use " From GCP " button to define the step of output image from ground control points.
A local Cartesian topocentric systemIDH_topo is used for production of orthoimage. Using " Calc Topo" button the origin of the topocentric system is located in the center of orthoimage area (the option " Auto topocentric" is automatically turned off). For most tasks this way of location of topocentric system is recommended. An advanced user can specify the location of the topocentric system manually.
Output orthoimage file pixels outside the image area will be filled with " Null Value" (for 8-bit grayscale 0 is black, 255 is white).
Задание положения топоцентрической системыIDH_Topo
Topocentric coordinate system is the Cartesian system in which exterior orientation will be done. It can be defined by its origin and azimuth. To set location of topocentric system select " Topocentric System " item from " Edit " menu. Or select page “ Topo ” of project window.
Radio buttons If selected Auto topocentric Origin of topocentric system defines in the centre of control points (default) User defined Origin of topocentric system can be defined by user
Button Calc Topo origin of topocentric system defined in the centre of area of interest (AOI) Auto Azimuth azimuth of topocentric system sets from camera definition according to the pass of satellite
ComboBox Ascending pass ascending pass of satellite orbit Descending pass descending pass of satellite orbit
For most tasks “ Auto topocentric ” location of topocentric system is recommended. An advanced user can specify the location of the topocentric system manually. You can specify latitude and longitude of the origin of topocentric system on Topo page of Project window. The coordinates are entered in the following формат: ddd: mm: ss.ss N|S|E|W where: ddd - degrees; mm - minutes; ss.ss - seconds with decimal fractions; N|S|E|W - North, South, East, or West.
" Auto Azimuth" button is used for automatic setting of azimuth of the topocentric system according to the camera type and taking into account ascending or descending orbit (option " Ascending pass" ):
Задание модели камеры
The source image can be described using various models. There are 7 models for image orientation in OrthoMap: · Polynomial (Conformal). · Polynomial (Affine). · Polynomial second order. · Frame (central projection); · Simple Dynamic; · Panoramic Static; · Panoramic Dynamic; You can choose geometric model of image which will be used for external orientation on page “ Model ” of Project window.
Задание направления системы координат изображения
The source image file has left coordinate system, but to solve the task of orientation it is necessary to use right coordinate system. It is possible to transform left coordinate system to right one in several variants. In OrthoMap it is possible to select the direction of image coordinate system. Select Edit -> Orientation, then select one of the four possible directions of coordinate system in Orientation window.
Окно внешнего ориентирования, окна снимка и картыIDH_Exterior
You can do external orientation by pressing “ Exterior orientation ” Will be opened two windows: · Exterior orientationIDH_Ext – with list of control point (if were imported or defined in previous run). · Image window - with input image.
On image window you can use commands: Select - select conrtol point closest to cursor position; All image - fit image to window (keyboard grey *); Zoom in - increase image in window (keyboard grey +); Zoom out - decrease image in window (keyboard grey -); Zoom mode - cursor in zoom mode (left click – select in image central point of window, drag cursor – new zoom); press key ‘Shift’ and you will be able to change pixel coordinates for current control point (instant Arrow mode ); Arrow mode - left click changes pixel coordinates for current control point Auto histogram stretch - increase brightness of image. All command are available from popup menu (right click on image).
“Open raster map”
Общее описание
The window " Exterior Orientation " contains the table of GCPs each of which can be in two modes: On/active (" Yes" in column On/Off) and Off/passive (" No" in column On/Off). Switching of modes can be done by left mouse button double click on the cell " On/Off" of the row with required point. Active points will be used in orientation process automatically. Position errors in X and Y will be shown in columns " Rxy, m", " dX, m" and " dY, m". The aggregate result of orientation (RMS) will be shown in status line in the bottom of the window.
The GCP table has the following fields: · Name - point name (without blanks); · On/Off - point status, only active points will be used in orientation and pixel calculation; · X, pixels - pixel values of X coordinate in image file; · Y, pixels - pixel values of Y coordinate in image file; · Easting, m - geodetic coordinate West-East in meters; · · Northing, m - geodetic coordinate North-South in meters; · Height, m - point height in meters; · Rxy, m – RMS on x, y; · dX, m – X error on point; · dY, m – Y error on point.
There are the following buttons in this window: Undo - undo last changes; Add point - add point after the current one; Delete point - delete current point; Solve - solve external orientation according current geometric model; RMS w/o - RMS is calculated for each point (shown in column " RMS w/o" ) in assumption that this point is passive. In this mode we can find the worst point (with the minimal value in the column " RMS w/o" ) and turn it off. Calc pixels - calculate pixel coordinates for current point with known geodetic coordinates, first order polynomial is used, its coefficients are calculated for all active points, not less than two active points with known pixel and geodetic coordinates are required; Calc pixels for all “No” points - calculate pixel coordinates for current point with known geodetic coordinates, first order polynomial is used, its coefficients are calculated for all active points, not less than two active points with known pixel and geodetic coordinates are required; Calc map - calculate geodetic coordinates for current point with known pixel coordinates, first order polynomial is used, its coefficients are calculated for all active points, not less than two active points with known pixel and geodetic coordinates are required. Geometric model - ComboBox for geometric model selection
Редактирование существующей точкиIDH_Edit
For editing of existing point you must select the row with this point in window " External Orientation ". The point becomes current and will be shown in the table and on image in appropriate color. In normal state the image window is in zoom mode (cursor ). For current point you must find its position on image and holding Shift key (the window mode changes to arrow mode and cursor image will be ) click left mouse button in selected location on image. Pixel coordinates in GCP table will be changed for the current point.
To add a new point press button " Add point ".
You can define point geodetic coordinates from map. Press button
There are three help modes for user (buttons " Calc Pixels", " Calc Map", " RMS w/o" ).
Внешнее ориентирование
The source image can be described using various models. There are 7 models for image orientation in OrthoMap: · Polynomial (Conformal). · Polynomial (Affine). · Polynomial second order. · Frame (central projection); · Simple Dynamic; · Panoramic Static; · Panoramic Dynamic; In order to achieve maximal accuracy in orthorectification it is necessary to select the image model correctly. The following table shows default settings of orientation model for different types of cameras (these settings can be changed by operator):
Утилиты
Initially Menu “ Utilities ” contains some useful utilities: " Orthorectification " – predefined tool for rectification " Import DEM from XYZ file " – predefined tool for DEM import " Import DEM from line формат " – predefined tool for DEM import " Import DEM from one Z on line " – predefined tool for DEM import You can tune this menu. Menu items may be defined in file ‘tools.ini’ in OrthoMap folder. You must fill two lines for every menu item: first line – CaptionXXX – text line which will be shown in menu; second line – ModuleXXX – program, loaded on click, where XXX – number of menu line, first line has number 000. If CaptionXXX=- then there will be only line in the menu (see line Caption001) And Number must be equal to overall quantity of menu lines
Example of predefined menu: [Tools] Number=5 Caption000=Orthorectification Module000=rectify.exe Caption001=- Module001=- Caption002=Import DEM from XYZ text file Module002=Xyz2Bin2.exe Caption003=Import DEM from line формат Module003=Line2Bin.exe Caption004=Import DEM from one Z on line Module004=Asc2Bin.exe
The Coordinate Calculator
Coordinate Calculator may be used for calculation of ground control points in needed projection.
See Coordinate Calculator User’s Guide for detailed description http: //vinek.narod.ru/ccalc.html
Reproject Utility
Reproject utility is used to reproject orthoimages and DEM from one coordinate system to another. Input and output coordinate systems are specified in the same way as in Coordinate Calculator (see above section). Specify " Input file" and " Output file" through common " Open file" dialog. It is possible to specify required pixel size in meters for output file (by default it is equal to input file pixel size).
Export of DEM to ASCII file
If necessary it is possible to export DEM from the interior формат OSD to ASCII file in one of the following форматs: * ASCII формат with one height value per a line, lines are separated by < CR> /< LF>. The hight values in output file are located from the North-West corner by lines.
* ASCII формат with each line containing all height values of DEM in one line. The values are blank separated, lines are separated by < CR> /< LF>. The hight values in output file are located from the North-West corner.
ASCII формат with values N (point number), X (Easting), Y (Northing), Z (Height) in each line, lines are separated by < CR> /< LF>. N X, Y, Z values are separated by comma and blank. The points in output file are located from the South-West corner by lines.
Flip
To flip or rotate source image and DEM files around horizontal axis use " Flip" utility from " Utilities" item of Main Menu.
- no flip, can be used for формат conВерсия, e.g. TIFF to BMP; - flip around vertical axis; - flip around horizontal axis; - rotation 1800; - rotation 900 clockwise; - rotation 900 counterclockwise;
Форматы входных файлов
· Исходные снимки. Исходные снимки могут быть в форматах: TIFF, BMP, JPEG, OSD, ERS, DTM. · Файлы ЦМР. ЦМР может быть в следующих форматах: OSD, ERS, DTM или TIFF 16-bit формат или могут быть импортированы из ASCII формата (смотри " Импорт ЦМР из ASCII файла" IDH_Imp выше).
Формат of OSD file header
Заголовок OSD файла разделен на следующие блоки: CoordinateSystem. Этот блок содержит следующее:
Эллипсоид (" Datum" ); Картографическая проекция (" Projection" ); Единицы измерения(" Units" ) - метры.
ImageInfo. Блок содержит следующую информацию:
* Тип ячейки (" CellType" ); * X и Y размеры ячейки в " Units" (XDimension, YDimension); * Количество строк (" NrOfLines" ) и колонок (" NrOfCellsPerLine" ) файла данных; * Точка привязки (" RegistrationPoint" ) – геодезические координаты точки привязки в " Units"; * Пиксельные координаты точки привязки в файле (" RegistrationCellX" and " RegistrationCellY" ); * Количество диапазонов (" NrOfBands" ).
Example OrthoSetDataHeader [ Версия = 1.0 LastUpdated = Fri Jun 30 17: 20: 24 GMT 2000 DataSetType = OrthoSetData ByteOrder = LSBFirst CoordinateSystem [ Datum = " PULKOVO" Projection = " GAUSE15" Spheroid = " " Units = " METERS" CoordinateType = EN CoordinateSystem ] ImageInfo [ CellType = UNSIGNED16BITINTEGER Xdimension = 20.000 Ydimension = 20.000 NrOfLines = 250 NrOfCellsPerLine = 250 RegistrationPoint [ Eastings = 6334000.000 Northings = 3324000.000 RegistrationPoint ] RegistrationCellX = 0.000 RegistrationCellY = 0.000 NrOfBands = 1 ImageInfo ] OrthoSetDataHeader ] Формат GCP-файла
GCP-файл (Ground Control Points) формируется любым текстовым редактором. Представляет собой текстовый файл, каждая строка которого содержит информацию об одной контрольной точке в следующем виде: Yes 11623.500 3001.500 8224924.070 2019273.800 2713.240 Yes 11756.500 3533.500 8228258.370 2019053.460 2636.130 Yes 11165.500 3923.500 8229381.510 2014885.680 2520.240 Yes 11404.500 4533.500 8233366.060 2015145.070 2392.550 Yes 11535.500 5296.500 8238031.170 2014480.110 2251.360 Yes 10516.500 3920.500 8228202.040 2011003.240 2789.130 Yes 10892.500 5201.500 8236113.530 2011195.720 1477.380 Yes 10562.500 5665.500 8238150.650 2008438.600 1290.270 Yes 11582.500 8136.500 8254624.010 2009277.840 2137.370 Yes 10879.500 8344.500 8254497.070 2004745.150 2194.620 Yes 11845.500 6690.500 8246715.120 2013603.510 2197.420
Техническая поддержка
Home Page: http: //vinek.narod.ru http: //www.geocities.com/vinek E-mail: vinek@yahoo.com
(c) 2004-2006 Vinek Software ORTHOMAP Версия 1.33 Руководство пользователя Содержание
ВведениеIDH_Intro Общее описание пакета OrthoMapIDH_Gener Требования к аппаратным и программным средствамIDH_Req Инсталляция и запуск OrthoMapIDH_Inst РегистрацияIDH_Reg Стандартная последовательность действий для создания ортофотоIDH_Seq Метод коррекции систематических ошибок при создании ортофотоIDH_Meth Работа с программой Основное менюIDH_MMenu Создание проектаIDH_Crea Открытие существующего проектаIDH_Open Импорт опорных точекIDH_ImpGCP Просмотр изображенийIDH_Preview Окно проекта Задание рабочих файловIDH_SetW Задание параметров камерыIDH_Camera Задание координатной системы и метода интерполяции пикселовIDH_CoordS Задание размера и расположения ортофото (AOI)IDH_Loc Задание положения топоцентрической системыIDH_Topo Задание модели камерыIDH_Model Задание направления координатной системы снимкаIDH_Direct Окно внешнего ориентирования, окна снимка и картыIDH_Exterior Общее описаниеIDH_General Редактирование существующей точкиIDH_Edit Внешнее ориентированиеIDH_Ext Трансформирование снимковIDH_Ortho Утилиты Координатный калькуляторIDH_Ccalc Утилита ReprojectIDH_Reprj Импорт ЦМР из текстового (ASCII) файла – одна высота в строкеIDH_Imp Импорт ЦМР из текстового (ASCII) файла – одна строка ЦМР в строкеIDH_ImpLine Импорт ЦМР из текстового (ASCII) файла – значения XYZ в строкеIDH_ImpXYZ Экспорт ЦМР в текстовый (ASCII) файлIDH_Exp Утилита FlipIDH_Flip Форматы файлов Форматы входных файловIDH_Inp Формат выходного ортофотоIDH_Out Формат файла заголовка OSDIDH_Osd Формат файла опорных точек GCPIDH_Fgcp Формат файла опорных точек PTSIDH_Pts Коды ошибок OrthoMapIDH_Abn Техническая поддержкаIDH_Supp
(c) 2004-2009 Vinek Software Введение
Пакет программ OrthoMap позволяет обрабатывать снимки, полученные следующими камерами(спутниками): · КВР-1000, · TK-350, · КФА-1000, · MK-4, · Ресурс ДК1 · Landsat TM · IKONOS · IRS-1C · Spot 1, 2, 3 · QuickBird · ALOS (PRISM) · аэрокамерами
Пакет OrthoMap позволяет создавать следующие типы геопривязанных(хотя бы одна точка изображения имеет геодезическую координату и оси снимка параллельны осям геодезической системы координат) изображений: · Ортотрансформированные изображения – если используется Цифровая Модель Рельефа (ЦМР); · Геометрически корректированные изображения ( ортотрансформированные на плоскость с одной высотой ) – если используется одна заданная высота для обработки всех точек изображения; · Трансформированные изображения – если используется полиномиальная модель для трансформирования изображения; · Гео привязанные изображения (без трансформирования)
Для создания ортотрансформированных изображений необходимо иметь следующие исходные данные: · ЦМР на всю территорию, которая должна быть обработана; · Набор опорных точек; · Исходное изображение
Для создания геометрически корректированных изображений необходимо иметь следующие исходные данные: · Средняя высота для всей области обработки; · Набор опорных точек · Исходное изображение
Для создания трансформированных изображений необходимо иметь следующие исходные данные: · Набор опорных точек · Исходное изображение. Пакет OrthoMap включает в себя следующие модули: · основной модуль Omap для осуществления внешнего ориентирования; Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 569; Нарушение авторского права страницы

 из панели инструментов). Автоматически будет создан новый проект, выбрана система координат по умолчанию WGS-84/UTMIDH_CoordS. Редактирование и сохранение проекта становятся доступными после создания проекта.
из панели инструментов). Автоматически будет создан новый проект, выбрана система координат по умолчанию WGS-84/UTMIDH_CoordS. Редактирование и сохранение проекта становятся доступными после создания проекта.
 или " Save as"
или " Save as"  на панели инструментов).
на панели инструментов). на панели инструментов. Откроется стандартный диалог открытия файлов. Используйте этот диалог для поиска и выбора файла проекта. Функции редактирования и сохранения проекта станут доступны после открытия проекта. Автоматически будет открыто окно проекта.
на панели инструментов. Откроется стандартный диалог открытия файлов. Используйте этот диалог для поиска и выбора файла проекта. Функции редактирования и сохранения проекта станут доступны после открытия проекта. Автоматически будет открыто окно проекта.
 - отобразить полное изображение в окне;
- отобразить полное изображение в окне;  - увеличить в 2 раза;
- увеличить в 2 раза;  - уменьшить в 2 раза;
- уменьшить в 2 раза;  - автоматическое отсечение гистограммы
- автоматическое отсечение гистограммы






 button on main window toolbar.
button on main window toolbar.
 button will be shown on main window toolbar.
button will be shown on main window toolbar.





