
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
При чугунных колодках (1) и композиционных (2)
Рис. 4. Схема центрального барабанного тормоза: Dб , Dк – диаметры барабана и ведущего колеса Расчет тормозной силы. Тормозная сила электроподвижного состава В будет равна сумме тормозных сил, развиваемых тормозными устройствами:
здесь k - число тормозных барабанов на подвижном составе. С учетом выражения (5):
Для двухосного троллейбуса, где на каждом движущемся колесе имеется тормозной барабан, k = 2, а для четырехосного трамвая k = 4. Если в выражении (10) коэффициент трения φ к принять постоянным, т. е. можно вынести за знак суммы, то получим
Выражение под знаком суммы называют приведенным к ободу колеса нажатием тормозных колодок, т.е.
Тогда тормозная сила
или в удельных единицах
Для удобства построения тормозных характеристик вводится понятие тормозного коэффициента подвижного состава θ, который характеризует мощность тормозных средств и равен отношению суммы приведенных нажатий колодок на вес подвижного состава
Тогда выражение (14) примет вид
Значения расчетных коэффициентов трения φ к для различных типов тормозов следующие: Чугунные колодки - 0, 27; дисковые и барабанные тормоза с позиционными колодками - 0, 35; рельсовые электромагнитные тормоза - 0, 18. Пользуясь выражением (16), можно построить тормозную характеристику подвижного состава b(v). Ограничение тормозной силы. Как видно из выражения (12), с увеличением нажатия на колодки тормозная сила увеличивается. Но она не может расти беспредельно. Наибольшее значение тормозной силы ограничено силой сцепления колеса с рельсом, которая определяется по следующему выражению Bmax = 1000mтgψ , (17) где mтg - тормозной вес поезда; ψ - коэффициент сцепления колеса с рельсом. При превышении этой величины нарушается сцепление колеса с рельсом или полотном дороги и возникает юз. Для избегания юза необходимо, чтобы общая тормозная сила любой колесной пары не превосходила наибольшей по сцеплению тормозной силы В ≤ Bmax = 1000mтgψ (18) С учетом выражения (14) получим:
или
откуда следует
Отношение наибольшего суммарного нажатия колодок
Из неравенства (21) следует,
т. е. сила нажатия ограничена условиями сцепления колеса и рельса или колеса и дороги. При условии, что все оси подвижного состава тормозные (т = тт), наибольший тормозной коэффициент будет равен коэффициенту нажатия Θ mах = δ . Такое значение тормозного коэффициента следует выбирать при торможении с наибольшим нажатием колодок, т. е. при экстренном торможении. При рабочем торможении тормозной коэффициент подвижного состава составляет 0, 6 - 0, 7 от наибольшего значения. Значения коэффициентов нажатия для различных видов подвижного состава городского электрического транспорта (ГЭТ) следующие: Трамвайные, вагоны (моторные) - 0, 85 - 1, 2; вагоны метрополитена - 0, 5 - 0, 6; вагоны с дисковыми и барабанными тормозами - 0, 6 - 0, 7; троллейбус - 1, 5 – 2; трамвайные вагоны с рельсовым электромагнитным тормозом – 2, 0.
Механическая устойчивость. Рассмотрим тормозную характеристику подвижного состава B(v) для тормоза с чугунными и композиционными колодками (рис. 5). При торможении на спуске силой, вызывающей ускорение, является направленная по движению подвижного состава сила от уклона mgi. Ускорению подвижного состава будет противодействовать сумма сил торможения и основного сопротивления движению B + Wo. Следовательно, тормозная характеристика будет устойчива в том случае, если сумма сил В + W0 возрастает с увеличением скорости. Условие механической устойчивости при торможении на спуске запишется в виде
Как следует из рис. 5, при движении по спуску установившаяся скорость vу будет иметь место в точке а, в которой В + W0 = mgi. Согласно основному уравнению движения справа от точки а ускорение будет положительно, а слева - отрицательно. Для тормоза с чугунными колодками (рис. 5, а) при случайном увеличении скорости на значение Δ v замедляющая сила B + W0 будет меньше силы от уклона В+Wo< mgi, и произойдет дальнейшее увеличение скорости. При уменьшении скорости на значение Δ v В+Wo > mgi (25)
Рис. 5. К определению механической устойчивости колодочно-бандажного тормоза с чугунными (а) и композиционными (б) колодками при торможении на спуске
Таким образом, тормоз с чугунными колодками обладает механической неустойчивостью при торможении на спуске, так как тормозная сила при увеличении скорости падает резче, чем растет основное сопротивление движению. В случае применения композиционных колодок (рис. 5, б) в зоне рабочих скоростей получаем устойчивое механическое торможение. По типу привода механические тормоза разделяются на ручные, пневматические, гидравлические. На мощных типах подвижного состава применяются только пневматический и гидравлический приводы. Пневматический привод применяется на трамвайных вагонах РВЗ-6М2, ЛМ-68 и троллейбусе ЗИУ-682. На городском электрическом транспорте для упрощения схемы подвижного состава пневматический привод заменяют соленоидным. Соленоидный привод применяется на трамвайных вагонах КТМ-5МЗ и Т-3 (ЧССР). Дисковый тормоз. Основное их отличие заключается в том, что тормозная сила создается в результате трения колодки о вращающиеся фрикционные диски, которые связаны с колесными парами или с валами тяговых двигателей. Если вращающиеся элементы тормоза имеют плоскую поверхность, то такие тормоза называются дисковыми. Дисковые тормоза обладают следующими преимуществами: - коэффициент трения дисковых тормозов относительно высок (0, 25 - 0, 35), так как колодки для такого тормоза изготовливают из смеси асбестового волокна с металлическими стружками и древесными опилками, пропитанными бакелитом; - механически устойчивы, так как в рабочей зоне коэффициент трения практически не зависит от скорости. При механическом торможении вся кинетическая энергия превращается в тепло и выделяется в диске. Диск нагревается и, если процесс торможения длительный, плавится. Поэтому дисковые тормоза применяются при торможении с малых скоростей и как аварийные. Механическое торможение сочетают с реостатным либо с рекуперативным торможением. Общим недостатком рассмотренных видов механических тормозов является то, что наибольшее нажатие колодок ограничено условиями сцепления колес с рельсами или дорогой. Тем самым ограничиваются максимально возможные тормозные силы изамедления. Наибольшие замедления при торможении вэтих системах не превосходят 1, 5 - 2 м/с2. Между тем при экстренном торможении такие замедления недостаточны, поэтому при наличии только механического тормоза небезопасно развивать высокие скорости движения. Особенно это относится к тому виду городского электрическоготранспорта, у которого нет индивидуального полотна, изолированного от пешеходов идругих видов транспорта. Рельсовый тормоз. Рельсовые тормоза позволяют развивать тормозные силы, не ограниченные сцеплением колес с рельсами. Сущность рельсового тормоза заключается в том, что подвешенные на пружинах к тележке или раме вагона стальные электромагнитные рельсовые башмаки, свободно перемещающиеся в вертикальном направлении в специальных направляющих, притягиваются к рельсам при возбуждении их током. Сила трения, возникающая между башмаками и рельсами, является тормозной силой рельсового тормоза и определяется так:
где КР - сила притяжения башмака к рельсу, φ р - коэффициент трения башмака о рельс. Сила притяжения КР прямо пропорциональна квадрату магнитного потока Ф, который зависит от тока I, протекающего по катушке рельсового тормоза, и обратно пропорциональна значению воздушного зазора δ между рельсом и башмаком. Так как магнитный поток замыкается через рельсы, то воздушный зазор резко снижает магнитный поток и силу притяжения КР. В результате загрязнения рельса инеровностей башмак прилегает к рельсу не всей поверхностью. Поэтому при расчете рельсового торможения следует учитывать некоторый эквивалентный зазор. Чем больше загрязнен рельс, тем большим должен быть приведенный зазор. В целях быстрого введения в действие тормозов зазор должен быть невелик и при отсутствии торможения (порядка 10 - 12 мм), что предъявляет весьма жесткие требования к состоянию пути. Так как коэффициент трения стали о сталь резко падает с увеличением скорости, то и тормозная сила рельсового тормоза резко уменьшается с увеличением скорости. В связи с такими неопределенными характеристиками рельсового тормоза он нашел применение в основном как аварийный тормоз и для удержания подвижного состава на остановке. Рекуперативное торможение Общие сведения. При рекуперативном торможении тяговые двигатели работают в генераторном режиме, при этом вырабатываемая ими энергия отдается обратно в тяговую сеть. Эта энергия может быть использована поездами, находящимися на линии, или возвращена в первичную сеть. Рекуперативное торможение применяется как для торможения на спусках, так и для остановки подвижного состава, хотя последнее связано с определенными техническими трудностями. Для осуществления рекуперативного торможения необходимо, чтобы сумма э. д. с. тяговых двигателей в генераторном режиме при последовательном их соединении была выше напряжения контактной сети, т. е.
Ток и скорость подвижного состава при рекуперации соответственно:
Характеристики рекуперативного торможения могут быть построены, если известна зависимость магнитного потока от тока рекуперации СФг = f(IР). Указанная зависимость для каждой системы возбуждения двигателей постоянного тока (последовательной, параллельной, согласно-смешанной и встречно-смешанной) имеет свой характер. Рассмотрим характеристики рекуперативного торможения для тяговых двигателей различных систем возбуждения. Торможение при двигателях последовательного возбуждения. На рис. 6 представлены зависимости СФг = f(IР) при постоянной скорости v = const и суммы (UKC + Iрr) = f(IР) двигателя последовательного возбуждения.
Рис. 6. К определению электрической устойчивости двигателей последовательного возбуждения (а) и встречно-смешанного (б) при рекуперативном торможении Переходный процесс при рекуперативном торможении описывается уравнением
отсюда
где L – индуктивность цепи рекуперативного торможения. В режиме рекуперации действующей будет э, д. с. рекуперирующего тягового двигателя СФгv, а противодействующей - сумма напряжения контактной сети и падения напряжения в двигателе
Или
На рис. 6, а, где представлены зависимости для двигателя последовательного возбуждения, точка а1 соответствует электрическому равновесию, но оно неустойчиво. Если произойдет случайное уменьшение тока Ip1, э. д. с. станет меньше суммы Чтобы система была электрически устойчивой, необходимо, чтобы внешняя характеристика рекуперирующей машины СФГ v – IPr = f(IР) была падающей. Поэтому генератор последовательного возбуждения, у которого э. д. с. растет с увеличением тока намного быстрее, чем падение напряжения IPr является электрически неустойчивым. По этой же причине электрически неустойчива в генераторном режиме машина согласно-смешанного возбуждения. Торможение при двигателях встречно-смешанного возбуждения. В режиме рекуперативного торможения двигатель встречно-смешанного возбуждения может работать устойчиво, так как обладает падающей внешней характеристикой. Точка а (рис. 6, б) пересечения зависимостей СФГv(Iр) и Торможение при двигателях независимого возбуждения. При независимом возбуждении м. д. с. не зависит от тока рекуперации. Тормозные характеристики являются жесткими, так как скорость почти не изменяется с изменением нагрузки. При некоторой наименьшей скорости vmin и наибольшей м. д. с. рекуперативное торможение прекращается, так как э. д. с. становится недостаточной для того, чтобы уравновесить напряжение сети. Жесткость характеристик двигателя независимого возбуждения приводит к плохому распределению нагрузок между параллельно работающими двигателями и их повышенной чувствительности к колебаниям напряжения сети. Поэтому применяют схемы, позволяющие получать более мягкие характеристики. Одной из таких схем является схема со стабилизирующим резистором Rст (рис.7). В этой схеме возбудитель В включен последовательно с обмоткой возбуждения ОВ двигателя М и стабилизирующим резистором. При увеличении тока в режиме рекуперации будет увеличиваться падение напряжения на стабилизирующем резисторе и соответственно уменьшаться напряжение на обмотке возбуждения ОВ. Этим достигается уменьшение тока возбуждения и соответственно магнитного потока при увеличении тока Iр. Таким образом, получаем мягкие характеристики, необходимые для осуществления режима рекуперативного торможения. При этом могут быть использованы двигатели последовательного возбуждения и статические возбудители. Для схемы рис. 7 в режиме рекуперации справедливо выражение
Откуда
Рис. 7. Схема рекуперативного торможения двигателя Рис. 8. Характеристики рекуперативного Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 867; Нарушение авторского права страницы

 , (9)
, (9) (10)
(10) . (11)
. (11) (12)
(12) (13)
(13) (14)
(14) (15)
(15) (16)
(16) (19)
(19) , (20)
, (20) (21)
(21) к силе нажатия на рельсы или полотно дороги mТ g называется коэффициентом нажатия тормозных колодок δ
к силе нажатия на рельсы или полотно дороги mТ g называется коэффициентом нажатия тормозных колодок δ  (22)
(22) (23)
(23) (24)
(24) и скорость будет уменьшаться.
и скорость будет уменьшаться. (26)
(26) (27)
(27) (28)
(28) (29)
(29)
 (30)
(30)
 (31)
(31) . Следовательно, условие электрической устойчивости можно представить в виде
. Следовательно, условие электрической устойчивости можно представить в виде (32)
(32) (33)
(33) , что приведет к еще большему уменьшению тока IP. Этот процесс приведет к перемагничиванию тягового двигателя. Если произойдет случайное увеличение тока Ip1, э. д. с. станет больше суммы
, что приведет к еще большему уменьшению тока IP. Этот процесс приведет к перемагничиванию тягового двигателя. Если произойдет случайное увеличение тока Ip1, э. д. с. станет больше суммы  , ток начинает возрастать, система стремится к точке а электрического равновесия.
, ток начинает возрастать, система стремится к точке а электрического равновесия. . (34)
. (34) , (35)
, (35)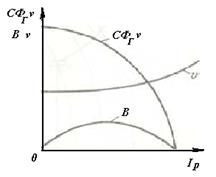
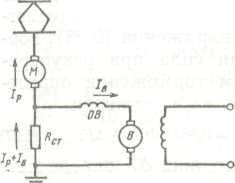 Где EB - э.д.с возбудителя; IB, IP – Соответственно ток возбуждения и рекуперации; rB –сопротивление обмотки возбуждения тягового двигателя; r0 – внутреннее сопротивление возбудителя.
Где EB - э.д.с возбудителя; IB, IP – Соответственно ток возбуждения и рекуперации; rB –сопротивление обмотки возбуждения тягового двигателя; r0 – внутреннее сопротивление возбудителя.