|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
НЕОПРЕДЕЛЕННОСТЬ МОДЕЛЕЙ СИСТЕМ УПРАВЛЕНИЯ⇐ ПредыдущаяСтр 20 из 20
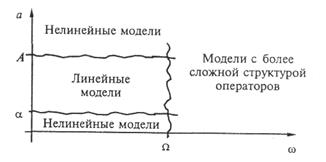
Математические модели не отражают исчерпывающим образом динамические свойства систем управления в силу идеализации и упрощений, неизбежных при моделировании, неточной реализации алгоритмов управления и изменений характеристик объектов и других элементов в процессе эксплуатации. Если изменения характеристик происходят достаточно медленно по сравнению с длительностью процессов управления, то вместо нестационарных моделей (например, дифференциальных уравнений с переменными коэффициентами) можно рассматривать множества стационарных моделей. Модели систем управления строятся для строго оговоренных условий взаимодействия со средой, и их адекватность оригиналам определяется и характеристиками воздействий. Значения параметров, структура операторов и класс операторов зависят от амплитуд изменения и частотного спектра сигналов. Линейные модели обычно строят для малых отклонений переменных от выбранных установившихся режимов. Если амплитуды сигналов превышают некоторое определенное значение A, то приходится строить нелинейные модели, как правило, учитывающие всевозможные ограничения в реальных элементах. Иногда область адекватности линейных моделей ограничивается малыми амплитудами а, для которых следует учитывать такие нелинейные явления, как зона нечувствительности, сухое трение и др.
Рис. 2.21. Иллюстрация области адекватности модели
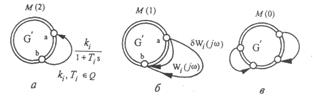
Выбранные структуры операторов (порядки дифференциальных уравнений) обеспечивают адекватность моделей по отношению к сигналам, частоты которых не превышают заданного предела. Границу области адекватности Ω, обычно удается несколько расширить путем усложнения структуры операторов. На рис. 2.21 иллюстрируется область адекватности моделей на плоскости амплитуд а и частот ω сигналов. Таким образом, модели систем управления оказываются не полностью определенными. Здесь выделяется несколько ситуаций, которые удобно систематизировать с помощью введенных ранее рангов неопределенности моделей R =0, 1, 2, 3. Прежде всего заметим, что менее определенные модели низких рангов R ' представляют собой множества более определенных моделей высших рангов R ": M(R')--{M(R'')}; R'<R". Модель второго ранга М(2) есть множество моделей третьего ранга (M(3)}, элементы которого различаются значениями параметров. На рис. 2.22, а условно изображен сигнальный граф G, причем, подграф G' определен полностью. Выделенной дуге (а, b) соответствует передаточная функция, параметры которой принадлежат заданному множеству Q . Следовательно, имеет место множество моделей с различными параметрами — это случай структурированной неопределенности.
Рис. 2.22. Модели различных рангов неопределенности
Модель первого ранга М(1) является множеством моделей второго ран-га (М(2)}, у которых одна и та же топология, однако структуры операторов могут различаться. В общем случае элементы содержат неструктурированную неопределенность, например, в виде аддитивных вариаций передаточных функций или частотных характеристик δWi (jω) дуг графа (рис. 2.22, б). Модель нулевого ранга M(0) представляет собой множество моделей первого ранга {М(1)} с различной топологией. В простейшем случае графы различаются местом включения одной дуги (рис. 2.22, в), например дуги, моделирующей регулятор или корректирующее устройство. При интерпретации результатов анализа и синтеза необходимо всегда иметь в виду неполную определенность моделей и учитывать ограниченность области их адекватности. Анализ, наряду с выявлением основных свойств поведения систем управления, должен включать и исследование чувствительности характеристик к вариациям параметров, структур операторов и топологии систем. Процедуры синтеза должны обеспечивать робастность систем управления, когда вариации характеристик элементов мало сказываются на процессах управления. ЛИТЕРАТУРА
1. Афанасьев В. Н., Колмановский В. Б. Математическая теория конструирования систем.— М.: Машиностроение, 2013. 2. Кузовков Н. Т. Динамика систем автоматического управления.— М.: Машиностроение, 2015. 3. Первозванский А. А. Курс теории автоматического управления. — М.: Наука, 2016. 4. Попов Е. П. Прикладная теория процессов управления в нелинейных системах.— М.: Наука, 2013. 5. Пупков К. А., Капалин В. И., Ющенко А. С. Функциональные ряды в теории нелинейных систем.— М.: Наука, 2016. 6. Уонэм М. Линейные многомерные системы управления.— М.: Наука, 2012. 7. Хлыпало Е. И. Нелинейные системы автоматического регулирования.— М.: Энергия, 2015. 8. Хофер Э., Лундерштедт Р. Численные методы оптимизации.— М.: Машиностроение, 2013. 9. Черноусько Ф. Л. Оценивание фазового состояния динамических систем.— М.: Наука, 2013. 10. Demuth H., Beale M. Neural Network Toolbox for Use with MATLAB.— The MathWorks, Inc., Natick, MA, 2014. 11. Demuth D., Hellendoom H, Reinfrank M. Introduction to Fuzzy Control.— Berlin, Heidelberg: Springer Verlag, 2013. 12. Gulley N., Jang R.J.-S. Fuzzy Logic Toolbox for Use with MATLAB — The MathWorks, Inc., Natick, MA, 2015. 13. Silver E.A., Peterson R. Decision Systems for Inventory Management and Production Planning.— John Wiley&Sons, Inc., 2015.
|
Последнее изменение этой страницы: 2019-03-22; Просмотров: 287; Нарушение авторского права страницы