
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Предмет теоретичної механікиСтр 1 из 21Следующая ⇒
ВСТУП В основу посібника покладено курс лекцій з теоретичної механіки, які автор читає студентам енергетичного та технологічних факультетів Українського державного університету харчових технологій. Основна мета посібника - стисло подати основи теоретичної механіки, не переобтяжуючи читача надмірними подробицями, але не втрачаючи при цьому розуміння фізичного змісту всіх величин і формул. Матеріал даного посібника викладений у традиційній послідовності розділів: статика, кінематика, динаміка, принципи механіки (елементи аналітичної механіки). Така послідовність дозволяє плавно підвести студентів до сприйняття образів теоретичної механіки та розчленити на окремі складові великий об'єм матеріалу, що полегшує студентам засвоєння знань і складання заліку. Розділи "статика" і "кінематика" можна безболісно міняти місцями, що дуже часто практикується з тих чи інших міркувань. Формули і рисунки мають подвійну нумерацію: перша цифра означає розділ, друга — порядковий номер формули чи рисунка в розділі. Важливі формули відмічені вертикальною рискою.
Предмет теоретичної механіки Теоретична механіка - одна із основних наук про природу і навколишній світ. Предметом досліджень цієї науки є механічний рух - вічний і нескінченний у своїх проявах. Під механічним рухом розуміється найпростіший рух матерії, який зводиться до зміни положення фізичних тіл у просторі з часом. Для визначення загальних законів механічного руху теоретична механіка широко використовує апарат вищої математики, зокрема векторну алгебру, аналітичну геометрію, диференціювання, інтегрування, теорію диференціальних рівнянь тощо. Основною метою курсу теоретичної механіки у програмі інженерної підготовки студентів немеханічних спеціальностей є вміння описувати мовою математики не лише механічний рух і рівновагу, але й немеханічні явища та процеси, що відбуваються у різних середовищах (твердих, рідких, газоподібних і їх сумішах), та в різних областях знань (хімії, біології, електротехніці тощо). Записати рівняння руху чи рівноваги, встановити основні закономірності і дати їм належне тлумачення - ось та кваліфікація, яку прагне надати майбутньому інженерові теоретична механіка. Крім того, теоретична механіка, як фундаментальна фізико-математична дисципліна, є науковою базою для багатьох дисциплін технічної механіки, до яких найперше належать опір матеріалів, теорія машин і механізмів, деталі машин, машини і обладнання харчових виробництв, а також гідравліка і газова динаміка, теорія пружності і теорія пластичних деформацій, теорія стійкості і теорія автоматичного регулювання та багатьох інших дисциплін. Виходячи з характеру задач, які розв'язує теоретична механіка, її прийнято ділити на три розділи: статику, кінематику, динаміку. Статика вивчає необхідні і достатні умови рівноваги матеріальних тіл під дією прикладених сил. Кінематика розглядає геометричні властивості руху тіл незалежно від сил, що спричиняють цей рух. Динаміка вивчає загальні закони механічного руху тіл під дією прикладених до них сил.
СТАТИКА ПРЕДМЕТ І ЗАДАЧІ СТАТИКИ Статика — це розділ теоретичної механіки, який вивчає перетворення систем сил та умови рівноваги тіл під дією сил. Виходячи з цього, статика розглядає дві основні задачі: 1) складання (або розкладання) сил і приведення систем сил, що діють на тіло, до найпростішого вигляду; 2) визначення необхідних і достатніх умов рівноваги тіл під дією прикладених до них сил. СИЛИ І СИСТЕМИ СИЛ У статиці основним об'єктом досліджень є сила. Сила — це міра механічної взаємодії між тілами, яка визначає інтенсивність і напрям цієї взаємодії. Поняття сили в механіці має наукову цінність тому, що її можна виміряти. За одиницю сили в технічній системі одиниць (МКГСС) приймається кілограм сили (кГс), в міжнародній системі одиниць (СІ) — ньютон (Н), а в абсолютній фізичній системі (СГС) — дина (дин). Крім цих основних одиниць є ще похідні (масштабні): кілоньютон (1 кН = 103Н) та тонна (1 т = 103 кГс).
Коли на одне тіло чи точку діє кілька сил, то їх сукупність називається системою сил. Якщо одну систему сил можна замінити іншою системою сил, і стан тіла при цьому не зміниться, то такі дві системи називаються еквівалентними. Якщо систему сил можна замінити однією силою, еквівалентною даній системі, то така сила називається рівнодійною. Якщо ж рівнодійна системи сил дорівнює нулеві, то така система сил називається урівноваженою. Якщо положення і рух даного тіла визначається іншими тілами, то ці тіла будуть для даного тіла опорами або в'язями. В'язі — це тіла, що обмежують вільність даного тіла. Оскільки класична ньютонова механіка була розроблена для вивчення руху небесних тіл, вільних від в'язей, то для використання законів Ньютона для невільних тіл їх умовно звільнюють від в'язей, застосувавши третю аксіому статики. АКСІОМИ СТАТИКИ В основу статики покладено декілька очевидних істин, які називаються аксіомами і відображають властивості сил, що діють на тіло.
Аксіома З (про звільнення від в'язей): механічний стан твердого тіла не зміниться, якщо відкинути в'язі і замінити їх дію реакціями.
Рис. 1.3. Рис. 1.4. Аксіома 5 (про затвердіння): якщо тіло, що деформується, перебуває у рівновазі, то його рівновага не порушиться, коли воно затвердіє. Аксіома 6: стан твердого тіла не зміниться, якщо до нього додати (або відняти) урівноважену систему сил. 3 другої аксіоми можемо зробити такі висновки : 1) будь-яку силу можна розкласти на дві складові сили; 2) рівнодійна двох сил, що перетинаються, є замикаючою стороною силового трикутника (рис. 1.4); 3) будь-яку кількість сил, що перетинаються в одній точці, можна звести до рівнодійної сили, яка буде замикаючою стороною силового многокутника. ТЕОРЕМА ПРО ТРИ СИЛИ ТИПИ В'ЯЗЕЙ ТА ЇХ РЕАКЦІЇ При розв'язуванні задач про рівновагу невільних тіл широко застосовується аксіома про звільнення від в'язей. Відкидаючи в'язь, її дію заміняють силою, яка називається реакцією в'язі. Реакція в'язі - це сила, що діє на дане тіло з боку в'язі (тобто протидія в'язі на дію даного тіла). Таким чином необхідно знати характер дії тієї чи іншої в'язі та напрям її реакції Роль в'язей (опор) на практиці виконують різні тіла і конструкції, основними з яких є: 1) нитка (шнур, трос, ланцюг, ремінь) - утримує тіло лише в напрямі свого натягу 2)
Рис. 1.6. Рис. 1.7. 3) ідеально гладенька поверхня (або каток) обмежує рух тіла лише у напрямі, перпендикулярному до поверхні і дозволяє рухатись у всіх інших напрямах. Реакцією гладенької поверхні є одна сила 4) циліндричний шарнір (підшипник) — конструкція яка складається з нерухомого стержня (осі шарніра) і обойми (втулки), що може обертатись навколо стержня. Тіло з'єднане о рухомою втулкою, може вільно рухатись вздовж осі шарніра Оz, але зустрічає протидію у напрямі осей Ох і Оу (рис. 1.10а).
б а Рис. 1.8.
Рис. 1.9.
а б Рис. 1.10. Таким чином, реакція циліндричного шарніра має дві складові 5)
Рис. 1.11. Рис. 1.12. 6) ідеальний стержень (невагомий стержень з шарнірами на кінцях) - протидіє лише у напрямі своєї осі або у напрямі, що з'єднує шарніри на кінцях стержня у випадку криволінійного стержня (рис. 1.12), тобто має одну реакцію 7)
Рис. 1.13.
СИЛИ НАПРАВЛЕНІ В ОДИН БІК
Рис. 1.15.
Скориставшись властивістю сили як ковзного вектора, перенесемо сили
Лінія дії рівноцінної
Таким чином, рівнодійна двох паралельних сил , направлених в один бік, по модулю дорівнює сумі модулів цих сил, направлена в той же бік, що й сили, і ділить відстань між точками прикладання сил на відрізки, обернено пропорційні силам. 2) СИЛИ НАПРАВЛЕНІ У РІЗНІ БОКИ Для визначення рівнодійної двох паралельних сил, направлених у рівні боки, скористаємось попереднім прийомом: введемо дві врівноважені сили
Рис. 1.16.
якщо сила Лінія дії отриманої рівнодійної сили
Таким чином, рівнодійна двох паралельних сил, направлених у різні боки, по модулю дорівнює різниці модулів цих сил, направлена в бік більшої сили та ділить відстань між точками прикладання даних сил зовнішнім чином на частини, обернено пропорційні модулям сил. 3) СИСТЕМА ДВОХ РІВНИХ ПАРАЛЕЛЬНИХ СИЛНАПРАВЛЕНИХ У РІЗНІ БОКИ (ПАРА СИЛ) Розглянемо випадок визначення рівнодійної двох паралельних сил, рівних за модулем і направлених у різні боки (так званої пари сил):
Повторивши всю процедуру попереднього випадку визначення рівнодійної паралельних сил, ми переконаємося у тому, що одержані сили
Однак дія пари сил на тіло не нульова і викликає обертальний рух тіла. Мірою обертальної дії пари сил служить момент пари , величина якого дорівнює добутку модуля однієї із сил папи на плече:
Напрям обертання, створюваного парою сил, визначається знаком момента пари: якщо пара сил обертає тіло проти годинникової стрілки - момент додатній, якщо за годинниковою стрілкою - від'ємний . Отже, момент пари сил має величину і напрям і є векторною величиною. Вектор момента пари сил перпендикулярний бо площини,в якій лежить пара, і направлений у той бік, звідки обертання тіла, здійснюване парою, відбувається проти годинникової стрілки. На рис. 1.18 показано дві пари сил, які діють в одній площині мають протилежно направлені вектори моментів.
Рис. 1.18. ОСНОВНІ ВЛАСТИВОСТІ ПАР СИЛ 1. Пару сил, не змінюючи її дії на тіло, можна переносити куди завгодно в площині, в якій лежить пара. 2. Пару сил, не змінюючи її дії на тіло, можна переносити у паралельну площину. 3. У парі сил, не змінюючи величини її момента, можна відповідно змінювати модулі сил і довжину плеча (тобто зменшувати сили, збільшуючи довжину плеча і навпаки). 4. Дві пари сил з рівними моментами еквівалентні 5. Декілька пар сил, що лежать в одній площині, можна замінити однією еквівалентною парою о моментом що дорівнює алгебраїчній сумі моментів цих пар. 6. Декілька пар сил, що лежать у різних площинах, можна замінити однією еквівалентною парою з моментом, рівним векторній сумі моментів цих пар. Приведені властивості пар сил являють собою окремі теореми, які ми приводимо без доведення. З їх доведеннями можна познайомитись у повних курсах теоретичної механіки. Виходячи о перших двох властивостей пар сил, маємо зробити висновок про те, що вектор момента пари є вільним вектором, який зберігає лише свою направленість і може переноситись паралельно самому собі у будь-яку точку. Виходячи о останньої" (шостої) властивості пар сил, можемо дійти висновку, що векторну суму моментів декількох пар, довільно розміщених у просторі, можна замінити однією еквівалентною (рівнодійною) парою сил з моментом, рівним векторній сумі моментів окремих пар:
Якщо на тіло діють кілька пар сил, і момент рівнодійної пари дорівнює нулю
то тіло під дією даної системи пар сил перебуває у рівновазі. Отже, для рівноваги системи пар сил, що діють на тіло, необхідно і достатньо, щоб момент рівнодійної пари дорівнював нулю. МОМЕНТ СИЛИ ВІДНОСНО ТОЧКИ Обертання тіла можна викликати не лише парою сил, але й окремою силою, коли одну із точок тіла закріпити нерухомо. Величина момента сили Р відносно центра О дорівнює добутку модуля даної сили на плече h : Плечем сили називається перпендикуляр, опущений із точки О на лінію дії сили або найкоротша відстань між точкою О і лінією дії сили (рис. 1.19).
Рис. 1.19. Знак момента сили відносно точки визначається, як і у випадку пари сил, напрямом обертання тіла навколо точки О: при обертанні проти годинникової стрілки - знак "плюс", за годинниковою стрілкою - "мінус". Отже момент сили відносно точки, як і момент пари сил, має величину і напрям, а тому є векторною величиною. Вектор момента сили відносно точки перпендикулярний до площини, в якій лежать дана точка і сила, і направлений у той бік, звідки обертання тіла під дією сили відбувається проти годинникової стрілки. МОМЕНТ СИЛИ ВІДНОСНО ОСІ Якщо момент сили відносно деякого центра О викликає обертальний рух тіла навколо цього центра, то момент сили відносно осі викликає, зрозуміло, обертання тіла навколо даної осі. При цьому задача визначення плеча сили відносно осі дещо складніша, ніж визначення плеча сили відносно точки, але врешті решт зводиться до останнього. Пояснимо це на прикладі (рис. 1.21).
Рис. 1.21. Щоб знайти плече сили Модуль момента сили відносно осі знайдемо як добуток модуля проекції сили Знак момента визначається, як і раніше, в залежності від напряму обертання тіла навколо осі під дією даної сили: якщо обертання здійснюється проти годинникової стрілки - знак "плюс", якщо за стрілкою - "мінус". Таким чином, момент сили відносно осі дорівнює добутку проекції сили на площину, яка перпендикулярна до даної осі, на плече. Плечем є перпендикуляр, опущений з початку координат на лінію дії проекції сили. При достатніх практичних навиках розв'язування задач операцію проектування сил на ту чи іншу площину можна проминути завдяки просторовій уяві, яку свого часу мав дати студентам курс нарисної геометрії. Момент сили відносно осі дорівнює нулю у двох випадках : 1) якщо сила паралельна осі (проекція сили 2) якщо сила перетинає вісь (плече h = 0). ТЕРТЯ КОВЗАННЯ Величина сили сухого тертя
Степінь шорсткості характеризується безрозмірним коефіцієнтом тертя f, що визначається експерименталь-но: або з допомогою динамометра, яким вимірюється сила тертя На рис. 1.23а тіло перебуває у граничній рівновазі під дією чотирьох сил: вага тіла
Рис. 1.23. На рис. 1.23б тіло вагою
Отже, коефіцієнт тертя
дорівнює тангенсу кута нахилу площини при граничній рівновагі. Однак слід зауважити, що в обох цих експериментах коефіцієнт тертя буде дещо завищений, тому що ми його визначали під час переходу тіла від спокою до руху. Але із досвіду пересування важких предметів нам добре відомо, що набагато важче зрушити тіло з місця, ніж потім пересувати його. Тобто, коефіцієнт тертя спокою більший за коефіцієнт тертя руху (статичний коефіцієнт тертя більший за динамічний). Величина коефіцієнта тертя ковзання залежить від матеріалу поверхонь тертя та їх стану (ступеню обробки, температури, вологості) і знаходиться в границях 0 < f < 1. Наведемо значення коефіцієнта f для деяких пар тертя: сталь по льоду - 0,027; сталь по сталі — 0,15; шкіряний ремінь по чавуну — 0,28; дерево по дереві - 0,54-0,62. ТЕРТЯ КОЧЕННЯ Вище ми описали явище тертя ковзання, яке виникає при відносному переміщенні (ковзанні) одного тіла по поверхні другого. Розглянемо ще одне фізичне явище, яке носить назву "тертя кочення". Якщо тверде тіло має форму колеса або катка і котиться по поверхні іншого тіла, то такий рух має виключати проковзування у точці контакту. Тобто сила тертя ковзання повинна бути достатня для того, щоб не допустити проковзування одного тіла (катка) відносно іншого (дороги). Сила тертя ковзання у цьому випадку відіграє позитивну роль. Якби каток і поверхня, по якій він котиться, були абсолютно твердими, то такий вид переміщення був би ідеальним і не викликав би ніякого опору. Однак опір рухові катка при його коченні все ж виникає, і спричиняється він деформацією катка чи поверхні, по якій каток котиться, або ж обома одночасно. Для вивчення цього явища, яке називається тертям кочення, розглянемо кочення абсолютно твердого катка вагою
Отже, коефіцієнт тертя кочення Слід нагадати, що при коченні катка по горизонтальній площині нормальний тиск дорівнює вазі тіла (N = Р), а у випадку кочення по площині, нахиленій піл кутом
Рис. 1.24. ЦЕНТР ВАГИ На кожну частинку твердого тіла діє сила земного тяжіння, пропорційна масі частинки і прискоренню вільного падіння Сили ваги є розподіленими силами, тобто діють на всі точки об'єму тіла. Оскільки теоретична механіка оперує лише зосередженими силами, то розподілені сили ваги замінюємо рівнодійною силою, яка називається вагою тіла, а точка прикладання рівнодійної сил ваги називається центром ваги тіла. Центр ваги тіла не змінює свого положення при вільному русі тіла у просторі. Ця властивість дозволяє експериментально визначати центр ваги неоднорідних плоских тіл складної конфігурації таким чином: достатньо підвісити тіло на нитці в будь якій його точці і побудувати продовження нитки в тілі (провести вертикаль), а потім підвісити тіло в іншій точці і теж побудувати її продовження. Точка перетину побудованих ліній є центром ваги цього тіла. Центр ваги порожнистих тіл і тіл складної просторової форми може лежати поза межами тіла (наприклад, центр ваги обруча, пустотілого циліндра тощо). Для аналітичного визначення положення центра ваги скори стаємося теоремою Варіньйона, яка стверджує, що момент рівнодійної сили дорівнює сумі моментів складових сил. Доведемо справедливість цієї теореми на такому прикладі. Нехай на тіло в точках А і В діють дві паралельні сили
Рис. 1.25.
Рівнодійна звідки або Тут що і потрібно було довести згідно з теоремою Варіньйона: момент рівнодійної Р дорівнює сумі моментів складових сил Методом індукції від п до n + 1 неважко покачати, що теорема Варіньйона справедлива для будь-якого числа сил, тобто Потрібно зауважити, що теорема Варіньйона справедлива не лише для системи паралельних сил ваги, але й для будь-якої системи сил, яка має рівнодійну. Із (1.42) знайдемо вираз для аналітичного визначення координати центра ваги тіла по осі Ох:
Повертаючи тіло на чверть оберта так, щоб сили ваги частинок тіла були паралельні іншій осі, одержимо аналогічні вирази для визначення двох інших координат центра ваги тіла
Для визначення положення центра ваги у векторній формі за допомогою радіуса-вектора
Таким чином, центром ваги тіла називається незмінно зв'язана з цим тілом точка, в якій прикладена рівнодійна сил ваги частинок даного тіла і координати якої визначаються формулами (1.43), (1.44) і.(1.45). У випадку однорідних тіл вага
Тут Підставляючи ці значення
Шляхом аналогічних міркувань легко встановити залежність між вагою однорідної пластинки і її площею S
а також між вагою однорідного тонкого стержня (лінії) і його довжиною L :
Додатково слід вказати деякі способи визначення положення центра ваги, які застосовуються в практиці: - Спосіб симетрії. Якщо однорідне тіло має площину, вісь чи центр симетрії, то його центр ваги лежить відповідно на площині, на осі чи в центрі симетрії. - Спосіб розбивання (поділу) на частини. Якщо тіло можна поділити на скінченну кількість таких частин, положення центра ваги яких відоме, то координати центра ваги всього тіла можна безпосередньо визначити із формул (1.43) і (1.44). Якщо ж тіло має отвори (вирізи, порожнини), то в цих формулах вагу (об'єм, площу) отвору віднімаємо. КІНЕМАТИКА ПРЕДМЕТ І ЗАДАЧІ КІНЕМАТИКИ Кінематика - це розділ теоретичної механіки, в якому вивчається механічний рух матеріальних об'єктів незалежно від сил, що спричинюють цей рух . Матеріальними об'єктами, рух яких будемо вивчати в кінематиці, є матеріальна точка і абсолютно тверде тіло. У кінематиці розглядаються дві основні задачі: 1) встановлення математичних залежностей (закону руху) для визначення переміщення точки або тіла відносно вибраної системи координат; 2) визначення кінематичних характеристик руху точки або тіла (траєкторії, швидкості та прискорення) у вибраній системі координат. Рух точки вважається заданим, якщо вказано спосіб визначення її положення у просторі в кожний момент часу. Існує кілька способів визначення руху точки. У кожному випадку розв'язування технічної задачі ми вибираємо для себе найбільш зручну і просту систему відліку, яка найкоротшим шляхом приведе до вирішення нашої проблеми. Зараз ми докладно розглянемо три основні способи визначення руху точки - векторний, координатний і натуральний. ВИЗНАЧЕННЯ РУХУ ТОЧКИ Якщо рух точки заданий координатним способом (задані координати х,у, z як функції часу), а потрібно визначити пройдену точкою відстань, радіус кривизни траєкторії або дотичне чи нормальне прискорення точки, то потрібно мати формули переходу від однієї системи до іншої. При координатному способі модуль швидкості точки визначається з формули
а при натуральному способі - з формули
Отже, можемо записати:
звідки знайдемо переміщення точки за деякий проміжок часу
Модуль дотичного прискорення дорівнює похідній по часу від модуля швидкості, а тому диференціюючи (2.30), одержимо:
або
Ця формула є основною формулою зв'язку між координатним і натуральним способами визначення руху точки. Модуль нормального прискорення можемо виразити так:
Тут
Для визначення радіуса кривизни траєкторії
З наведених формул ми бачимо, що вираз (2.32) є основною формулою переходу від координатного до натурального способу. КІНЕМАТИКА ТВЕРДОГО ТІЛА У кінематиці твердого тіла розглядають кілька видів руху, які за складністю можемо записати у такому порядку: поступальний, обертальний навколо нерухомої осі, плоско паралельний, обертальний навколо нерухомої точки та вільний рух тіла. Якщо всі точки тіла рухаються з однаковою швидкістю, то тіло здійснює поступальний рух. Якщо у тіла нерухомою лишається одна його точка, то тіло здійснює обертальний рух навколо цієї нерухомої точки. Якщо ж тіло має дві нерухомі точки, то воно обертається навколо нерухомої осі, проведеної через ці точки. Розглянемо спочатку два найпростіші рухи тіла - поступальний рух і обертання навколо нерухомої осі. Комбінація з цих двох рухів дає більш складний рух тіла - плоско-паралельний. ШВИДКІСТЬ ТОЧОК ТІЛА, ЩО ОБЕРТАЄТЬСЯ НАВКОЛО ОСІ (ФОРМУЛА ЕЙЛЕРА) Всі точки тіла, що обертається навколо нерухомої осі, описують навколо цієї осі концентричні кола відповідного радіуса. Розглянемо визначення кінематичних характеристик руху точок тіла (швидкість і прискорення) через характеристики обертального руху (кутову швидкість і кутове прискорення). При повороті тіла на деякий кут будь-яка точка цього тіла, що знаходиться на відстані R від осі, описує дугу, довжина якої визначається з формули
де Згідно з натуральним способом визначення руху точки, модуль її швидкості знаходиться як перша похідна по часу від дугової координати
або
Отже, швидкість будь-якої точки тіла, що обертається навколо нерухомої осі, дорівнює добутку кутової швидкості Цю формулу можна представити у векторній формі як векторний добуток двох векторів: вектора кутової швидкості Нехай рух точки М твердого тіла, що обертається навколо нерухомої осі (рис. 2.11), визначається радіусом-вектором точки
Рис. 2.11. Підставивши значення R у формулу (2.60), для швидкості точки М матимемо вираз:
Але вираз (2.62) являє собою запис модуля векторного добутку двох векторів Таким чином, ми переконалися у тому, що для визначення швидкості точки М можемо користуватися виразом
який називають формулою Ейлера у век торній формі . Напрям вектора швидкості Із цього правила виходить, що вектор швидкості будь-якої точки тіла, що обертається навколо осі, направлений по до тичній до кола, яке описує точка, в бік обертання тіла . Зображуючи вектор швидкості на рисунку, потрібно пам'ятати, що дотичний до кола вектор швидкості ВИПАДКИ ВІДСУТНОСТІ МЦШ Рухаючись плоско-паралельно, тіло іноді здійснює миттєвий поступальний рух. Тобто в дану мить МЦШ знаходиться на нескінченно великій відстані. У цей момент кутова швидкість 1) Якщо швидкості
Рис. 2.20. 2) Якщо швидкості СКЛАДНИЙ РУХ ТОЧКИ У розділі "кінематика точки" ми вивчали рух точки відносно декартової системи координат, яка безумовно вважалась нерухомою. Однак у дійсності не існує абсолютно нерухомих систем відліку, а є лише умовно нерухомі, адже в природі все рухається, бо рух - це спосіб існування матерії. У більшості технічних задач системи координат, зв'язані з Землею (так звані геоцентричні системи), вважаються нерухомими. Але ці ж системи в розрахунках, пов'язаних із космічними польотами, розглядаються як рухомі, а за нерухому приймається система, зв'язана з Сонцем (так звана геліоцентрична система). У машинах і апаратах харчових виробництв, особливо в складних автоматах, у роботах-маніпуляторах досить часто доводиться одночасно розглядати рух якогось фізичного об'єкта (матеріальної точки) відносно двох і більше систем координат, одна із яких рухається відносно іншої. Простим і дуже наочним прикладом, що ілюструє необхідність двох систем координат, є рух пасажира по палубі рухомого корабля, за яким спостерігають з берега. Рух пасажира (точки) відносно спостерігача на березі буде складним, тобто складатиметься з руху корабля і власного руху пасажира відносно корабля. Якщо з берегом зв'язати нерухому систему координат, а з кораблем - рухому систему, то рух точки (пасажира) відносно нерухомої системи координат називатимемо абсолютним рухом , а рух відносно рухомої системи - відносним рухом . Рух рухо мої системи координат відносно нерухомої (корабля відносно берега) називається переносним рухом . Точніше кажучи, переносним рухом для даного пасажира буде рух того місця (точки) корабля, у якому пасажир перебуває в даний момент. Швидкість і прискорення точки у складному русі також відповідно називаються абсолютною, відносною і переносною швидкістю та абсолютним, відносним і переносним прискоренням. Оскільки основними задачами кінематики є визначення закону руху і встановлення залежностей між кінематичними характеристиками рухомого об'єкта, то спробуємо записати рівняння складного руху точки. Нехай точка М рухається по поверхні рухомого тіла (або середовища) описуючи деяку криволінійну траєкторію (рис. 2.23). Виберемо нерухому декартову систему координат З точки
Рис. 2.23.
або
яка є законом руху точки. Тут ПРИСКОРЕННЯ КОРЮЛІСА Модуль прискорення Коріоліса знаходиться як модуль подвоєного векторного добутку двох векторів (див. формулу (2.108)):
Як можна судити з формули (2.112), модуль коріолісового прискорення дорівнює нулю в трьох випадках: 1) 2) 3) Напрям вектора коріолісового прискорення Згідно з правилом векторного добутку з формули
бачимо, що вектор
Рис. 2.24.
Якщо вектори 3.ДИНАМІКА ДВІ ЗАДАЧІ ДИНАМІКИ Вся величезна кількість задач, які розв'язує динаміка, зводиться всього-навсього до двох класів задач. Перша (пряма)задача динаміки — за відомими масою і законом руху визна чити сили ,що діють па точку. Друга (обернена) задача-за заданими силами і масою точки визначити закон її руху. Перша задача динаміки розв'язується порівняно просто і зводиться до подвійного диференціювання закону руху. Якщо рівняння руху точки задані координатним способом тобто відомі функції
то, двічі диференціюючи ці функції по часу, визначимо проекції прискорення У другій задачі динаміки за відомими силами необхідне визначити закон руху точки, тобто потрібно застосувати обернену до диференціювання дію - інтегрування. Розв'язування другої задачі динаміки зводиться до інтегрування диференціальних рівнянь, що описують рух точки. Ця задача часто є досить складною, оскільки диференціальні рівняння легко інтегруються лише у випадку сталих за величиною сил або сил, що є функціями часу. У загальному ж випадку силі залежать від переміщення, швидкості, квадрату швидкості тощо. Крім того, для правильного розв'язання необхідно вірно записати початкові умови руху, які потрібні для визначення сталих інтегрування, що також потребує деякої кваліфікації. План (або методика) розв'язування першої і другої динаміки передбачає послідовне виконання таких дій: 1) зобразити точку і показати вектори прикладених до неї активних сил; 2) звільнити матеріальну точку від в'язей і замінити їх дії реакціями; 3) вибрати зручну систему координат (якщо точка рухається по прямій, то одну з декартових осей направляємо вздовж руху точки, якщо ж точка рухається по колу чи по криволінійній траєкторії відомої в кожну мить кривизни 4) записати у векторній формі основне рівняння руху невільної матеріальної точки (II закон Ньютона, доповнений аксіомою про в'язі), і спроектувати всі вектори на вибрані осі; У випадку першої задачі динаміки наступним кроком є визначення невідомих сил, тобто завершення розв'язання задачі. При розв'язуванні другої задачі динаміки мусимо виконати ще кілька кроків: 5) розділити змінні і двічі проінтегрувати диференціальні рівняння руху; 6) записати початкові умови руху точки: початковий час t = 0, початкові координати і початкову швидкість (чи проекції початкової швидкості у випадку криволінійного руху); 7) підставити початкові умови руху в одержані інтеграли і визначити сталі інтегрування 8) переписати одержані інтеграли з урахуванням значень сталих інтегрування (записати закон зміни координат і швидкості точки з часом). На цьому друга задача динаміки по визначенню закону руху точки буде вважатись розв'язаною. Якщо ж необхідно знайти інші параметри руху, наприклад, кінцеву швидкість чи пройдений точкою за вказаний проміжок часу шлях, то потрібно: 9) записати кінцеві умови руху точки (пройдений за час 10) визначити необхідні параметри руху. ЗАТУХАЮЧІ КОЛИВАННЯ ТОЧКИ Затухаючі коливання точки мають місце у всіх реальних коливальних системах, оскільки на рухоме тіло завжди діють сили опору навколишнього середовища, зовнішнє і внутрішнє тертя, які призводять до розсіювання енергії в пружній системі. Звичайно опір середовища (рідини чи газу) пропорційний степені швидкості точки і направлений протилежно швидкості точки:
Тут Диференціальне рівняння, що описує прямолінійні затухаючi коливання точки, має вигляд
Перенесемо вліво всі члени цього рівняння, розділимо на масу т і введемо такі заміни
У результаті матимемо рівняння, яке відоме як стандартна форма диференціального рівняння затухаючих коливань точки:
Диференціальне рівняння (3.22), як і рівняння вільних коливань (3.7), також являє собою лінійне однорідне рівняння другого порядку і його розв'язок будемо шукати у такому ж вигляді
Підставляючи (3.23) і його похідні в рівняння (3.22), отримаємо характеристичне рівняння відносно
Корені рівняння (3.24) визначаються з формули
Таким чином, розв'язок (3.23) матиме вигляд
Ця формула показує, що, в залежності від значення підкореневого виразу 1) 2) 3)
Рис. 3.2. У другому випадку
і розв'язок (3.23) матиме вигляд
Рівняння (3.27) також описує неперіодичний рух точки і графік цієї функції якісно не відрізняється від графіка руху точки у випадку великого опору. У випадку
а розв'язок(3.23)
можемо записати так:
Тут Застосувавши підстановки Ейлера, рівняння (3.29) перепишемо у вигляді
Рис. 3.4. Якщо взяти відношення двох сусідніх амплітуд, то одержимо так званий декремент затухання
а його логарифм дає логарифмічний декремент затухання
Період затухаючих коливань знаходиться з формули
Якщо вираз (3.32) порівняти з виразом Т = ДВІ МІРИ МЕХАНІЧНОГО РУХУ В історії механіки відома майже столітня суперечка між послідовниками Рене Декарта (1596-1650) з одного боку і Готфріда Лейбніца (1646-1716) з другого про міру механічного руху. Декарт і його учні вважали, що єдиною мірою механічного руху є добуток маси на швидкість об'єкта Дискусія між ученими-механіками продовжувалася більше 100 років, тому що на той час (XVII і XVIII століття) не було чітких понять про силу та про можливість перетворення механічного руху в інші форми руху матерії, і вчені не могли дійти спільної думки. Остаточне вирішення цієї проблеми стало можливим лише в середині XIX століття після відкриття загального закону збереження енергії. Механіка завдячує цим Фрідріху Енгельсу, який з філософської точки зору узагальнив наукові досягнення того часу і у праці "Діалектика природи" вказав, що "механічний рух у дійсності має двояку міру, і кожна з цих мір використовується для досить обмеженого кола явищ". І далі: "Якщо наявний механічний рух передається таким чином, що він зберігається як механічний рух, то він передається відповідно до формули про добуток маси на швидкість (кількість руху). Якщо ж механічний рух передається так, що він зникає як механічний рух і воскресає у формі теплоти, електрики тощо, тобто якщо він перетворюється в якусь іншу форму руху матерії, то кількість цієї нової форми руху пропорційна добутку маси на квадрат швидкості..." Таким чином, у сучасній механіці мірами механічного руху вважаються дві величини - кількість руху ЗАГАЛЬНІ ТЕОРЕМИ ДИНАМІКИ Повну інформацію про рух матеріального об'єкта ми отримуємо при інтегруванні диференціальних рівнянь руху, тобто при розв'язуванні другої задачі динаміки. Однак у загальному випадку це досить складна задача. У простих випадках диференціальні рівняння можуть бути проінтегровані в елементарних функціях, а у більш складних застосовуються наближені методи та чисельне інтегрування за допомогою ЕОМ. Однак у багатьох конкретних інженерних задачах динаміки потрібну інформацію про параметри руху можна одержати набагато простіше за допомогою загальних теорем, до яких належать три теореми динаміки точки: - теорема про зміну кінетичної енергії точки; - теорема про зміну кількості руху точки; - теорема про зміну момента кількості руху точки; та чотири теореми динаміки системи матеріальних точок: - теорема про зміну кінетичної енергії системи; - теорема про зміну кількості руху системи; - теорема про зміну момента кількості руху (кінетичного момента)системи; - теорема про рух центра мас системи. Загальні теореми динаміки оперують поняттями, які мають реальний фізичний зміст (наприклад, кількість руху, кінетична енергія, робота тощо). Вони одержані шляхом нескладних перетворень диференціальних рівнянь руху, в результаті чого отримані зручні формули, які широко використовуються при розв'язуванні конкретних задач. Слід лише пам'ятати, що при застосуванні загальних теорем динаміки потрібно звертати особливу увагу на розрахункові дані задачі. Вибирати потрібно ту теорему, яка містить у собі зв'язок між відомими і невідомими величинами. Часто для розв'язування задачі потрібно застосувати декілька теорем динаміки. РОБОТА СИЛИ При використанні теореми про зміну кінетичної енергії точки чи системи необхідно вміти обчислювати роботу, яку виконують прикладені сили на даних переміщеннях. Елементарна робота сили
або, розкриваючи модуль скалярного добутку двох векторів, одержимо
Тут
Дещо інший вираз елементарної роботи отримаємо, якщо запишемо елементарне переміщення
оскільки З формул (3.68) видно, що робота може бути додатньою, від'ємною чи рівною нулю в залежності від кута - якщо напрям сили і напрям руху співпадають ( - якщо сила перпендикулярна до переміщення ( - якщо сила протидіє переміщенню ( Повною роботою сили на скінченному переміщенні точки, від
Застосуємо одержані вирами до визначення роботи таких найбільш поширених силових проявів, як сила ваги, сила пружності, момент сили тощо. РОБОТА СИЛИ ВАГИ
Нехай точка Елементарна робота сили ваги, згідно з формулою (3.67), дорівнює
Оскільки
Рис. 3.7. Отже ми встановили, що робота сили ваги не залежить від форми траєкторії, а лише від кінцевого переміщення по висоті. Знак роботи сили ваги додатній при русі тіла вниз і від'ємний при підйомі вгору: РОБОТА СИЛИ ПРУЖНОСТІ Розглянемо матеріальний об'єкт (точку М), який лежить на горизонтальній гладенькій площині і прикріплений до нерухомої стіни пружиною з жорсткістю с (див. рис. 3.1). При переміщенні точки із положення рівноваги вліво чи вправо виникає сила пружності
Повна робота
або остаточно
Отже, робота сил пружності дорівнює половині добутку коефіцієнта жорсткості на квадрат розтягу чи стиску пружини. ПОТУЖНІСТЬ СИЛИ Потужність визначається роботою, виконаною силою за одиницю часу. Наприклад, якщо за час dt сила
або по модулю
Отже, потужність сили є скалярною величиною, яка дорівнює добутку сили на швидкість точки її прикладання. Одиницею виміру потужності є ват (1 Вт = 1 Дж/с = 1 Н∙м/с). МОМЕНТИ ІНЕРЦІЇ При визначенні кінетичної енергії тіл, що обертаються, ми зустрілись із новою фізичною величиною, яка називається моментом інерції тіла. Поняття момента інерції було введене Леонардом Ейлером. Слід зауважити, що якщо маса тіл є мірою їх інертності при поступальному русі, то мірою інертності тіл при обертанні є момент інерції (або момент інертності). Моментом інерції тіла називається скалярна величина, яка характеризує розподіл маси в тілі (або в системі тіл) і є мірою інертності при обертальному русі. Розрізняють слідуючі моменти інерції: 1) полярний 2) осьові 3) відцентрові Для визначення полярного момента інерції
Оскільки
то
Підсумовуючи для всіх точок тіла , маємо
Таким чином, за формулою (3.90), полярний момент інерції дорівнює сумі добутків маси кожної точки тіла на квадрат її відстані до полюса (початку координат). Осьові (або аксіальні) моменти інерції визначаються для кожної
Відстань
Отже
Підсумувавши для всіх точок тіла, маємо
Аналогічно можемо записати вирази для
Осьовий момент інерції тіла дорівнює сумі добутків маси кож ної точки на квадрат її відстані до осі. Якщо складемо всі три осьові моменти інерції (3.94) і (3.95), то одержимо
або
Отже, сума осьових моментів інерції тіла дорівнює подвоєному полярному моменту, взятому відносно початку координат. Відцентровими моментами інерції називають величини, які дорівнюють алгебраїчній сумі добутків маси кожної точки тіла на добуток її відповідних координат:
Якщо відносно деякої системи координат, вибраної в тілі, відцентрові моменти інерції дорівнюють нулю, то осі такої системи називають головними осями інерції . Якщо ж початок такої системи координат співпадає з центром мас тіла (чи системи), то такі осі називають головними центральними осями інерції. Момент інерції тіла відносно заданої осі можна представити як добуток маси тіла на квадрат деякої умовної лінійної величини, яка являє собою відстань центра мас тіла до даної осі і називається радіусом інерції тіла: Тут
і може бути визначений експериментально. ПРИНЦИПИ МЕХАНІКИ Принцип - це основне, вихідне положення будь-якої науки. Принципами механіки називаються загальні положення, які містять у собі повну інформацію про механічний рух чи рівновагу матеріальних об'єктів. Різні принципи механіки можуть бути рівноцінні між собою або відрізнятись один від другого степенем загальності. В основу побудови механіки як науки положені декілька загальних принципів, прикладом яких може служити принцип Даламбера для невільної матеріальної точки. Цей принцип являє собою не що інше, як другий закон Ньютона, доповнений аксіомою про звільнення від в'язей. Однак, якщо положити принцип Даламбера в основу побудови механіки невільної системи матеріальних точок, то ми зіткнемося зі значними труднощами. Подолання цих труднощів можливе лише при конкретизації характеру накладених на точки системи в'язей і формулюванні загальних принципів механіки, в яких, на відміну від принципу Даламбера, ця конкретизація автоматично враховується для системи в цілому, а не для кожної точки зокрема. Як виявилось, такого типу конкретизація характеру в'язей можлива в їх частковій ідеалізації. Стосовно питання ідеалізації в'язей, то ми з цим уже зустрічалися у статиці. До ідеальних в'язей ми віднесли в'язі у вигляді абсолютно гладеньких поверхонь або ліній, гнучких нерозтяжних ниток, ідеальних стержнів. Абсолютно шорстка нерухома поверхня є прикладом ідеальної в'язі для тіла, що котиться по ній без проковзування (точка контакту тіла з поверхнею миттєво стає нерухомою). У статиці ми розглядали найпростіші в'язі і знаходили їх реакції. Однак у більшості випадків при дослідженні руху механічних систем визначення реакцій в'язей не є необхідним. Тому виникло питання про пошуки такого методу розв'язування задач динаміки невільної механічної системи, при якому реакції в'язей автоматично виключались би з розгляду. І такий метод був знайдений Жозефом Луї Лагранжем (1736-1813), основоположником нової механіки, названої, на відміну від класичної, аналітичною механікою. Аналіз механічних в'язей показав Лагранжу, що більшість з них мають одну чудову властивість, а саме: сума елементарних робіт реакцій в'язей на нескінченно малих можливих (або віртуальних) переміщеннях системи дорівнює нулю. Такі в'язі були названі ідеальними . Застосування поняття можливих переміщень викликане тим, що коли на механічну систему накладені в'язі, то дана система не в змозі здійснювати будь-які переміщення, оскільки в'язі допускають лише деякі переміщення точок системи. До загальних принципів механіки, крім принципу Даламбера, належать принцип Лагранжа (або принцип можливих переміщень, який називають загальним рівнянням статики), а також принцип Даламбера-Лагранжа, відомий як загальне рівняння динаміки. Ці три принципи лягли в основу аналітичної механіки, яка збагатила науку новими могутніми методами. Аналітична механіка - це розділ механіки, який, за словами його творця Лагранжа, "не потребує ні побудов, ні геометричних або механічних міркувань, а потребує лише алгебраїчних операцій, підпорядкованих планомірному і одноманітному ходу". Блискучим підтвердженням цього є метод побудови диференціальних рівнянь руху механічної системи в узагальнених координатах (рівняння Лагранжа II роду). ПРИНЦИП ДАЛАМБЕРА Як ми вже говорили, основний закон механіки - (II закон Ньютона) - був відкритий Ньютоном стосовно до руху вільної матеріальної точки чи тіла, тобто для задач небесної механіки. Але після того, як була додатково сформульована аксіома про звільнення від в'язей, Жан Лерон Даламбер (1717-1783) запропонував дуже зручний метод (або принцип), який дозволив формально звести задачі динаміки до рівнянь рівноваги, тобто до рівнянь статики. У деяких книгах принцип Даламбера іменується принципом Германа-Ейлера-Даламбера, оскільки ним задовго до Даламбера користувались, але ніде цього не опублікували, петербурзькі академіки Я.Ґерман (1716 р.) та Л.Ейлер (1737 р.). Запис принципу Даламбера можемо одержати шляхом таких нескладних дій. Запишемо диференціальне рівняння руху невільної матеріальної точки, на яку діють активні сили Р і реакції в'язей
і перепишемо цю рівність таким чином: Оскільки добуток Силою інерції називається векторна величина, яка дорів нює добутку маси точки на її прискорення і направлена про тилежно прискоренню. Рівність (4.2) є математичним записом принципу Даламбера для матеріальної точки:
Формулювати принцип Даламбера можемо так: у кожний момент часу активні сили і реакції в'язей, що діють на точку, зрівноважуються силами інерції. Якщо точка рухається по криволінійній траєкторії, то її прискорення складається із суми двох прискорень - дотичного (тангенціального) і нормального. Відповідно до цього сили інерції також називають тангенціальними і нормальними (або відцентровими) силами інерції. За модулем ці сили інерції відповідно дорівнюють:
Якщо точка належить тілу, що обертається навколо осі, то модулі її тангенціальної і відцентрової сил інерції визначаються через параметри обертального руху тіла
Тут R - відстань від точки до осі обертання, Для системи матеріальних точок принцип Даламбера записується у вигляді системи двох векторних рівнянь, що зв'язують між собою активні сили, реакції в'язей, сили інерції та моменти цих сил відносно деякого центра О:
При практичному розв'язуванні задач рівняння (4.7) записують у проекціях на осі декартової системи координат, або на осі натурального тригранника КЛАСИФІКАЦІЯ В'ЯЗЕЙ Перш ніж перейти до розгляду інших принципів механіки, познайомимось із характером механічних в'язей, які можуть бути накладені на точки системи. Усі в'язі, що обмежують положення або рух матеріальних об'єктів, математично описуються так званими рівняннями в'язей, у які в загальному випадку можуть входити час руху об'єкта, його координати і швидкості:
У кожному конкретному випадку, в залежності від виду цієї функції, в'язі розрізняють (класифікують) так: - геометричні чи кінематичні; - стаціонарні чи нестаціонарні; - голономні чи неголономні; - утримуючі чи неутримуючі. Геометричними в'язями називають в'язі, до рівнянь яких входять тільки координати і можливо час руху матеріального об'єкта. Наприклад, рівняння в'язі для математичного маятника сталої довжини з підвісом у початку координат має вигляд Кінематичними (або диференціальними) називаються в'язі, які накладають обмеження на швидкості точок, до рівнянь яких входять перші похідні від координат. Наприклад, при коченні циліндра без проковзування по нерухомій площині швидкість центра циліндра і його кутова швидкість зв'язані між собою залежністю, яка є рівнянням даної в'язі: Стаціонарні в'язі - це в'язі, до рівнянь яких час До голономних належать всі геометричні в'язі, а також ті з кінематичних в'язей, які шляхом інтегрування можуть бути приведені до геометричних. До неголономних належать ті кінематичні в'язі, рівняння яких не можуть бути проінтегровані. Прикладом неголономної в'язі може служити куля, що котиться по площині без просковзування. Однак циліндр, що котиться без просковзування по площині, є прикладом голономної в'язі, оскільки рівняння в'язі Утримуючою (або двобічною) в'яззю називається в'язь, дія якої на тіло не може припинитись. Прикладом утримуючої в'язі є математичний маятник, підвішений на невагомому (ідеальному) стержні. Неутримуючою (або однобічною) в'яззю є в'язь, від якої тіло може звільнитися. Прикладом неутримуючої в'язі є площина, по якій рухається тіло, що може залишити цю площину. ВСТУП В основу посібника покладено курс лекцій з теоретичної механіки, які автор читає студентам енергетичного та технологічних факультетів Українського державного університету харчових технологій. Основна мета посібника - стисло подати основи теоретичної механіки, не переобтяжуючи читача надмірними подробицями, але не втрачаючи при цьому розуміння фізичного змісту всіх величин і формул. Матеріал даного посібника викладений у традиційній послідовності розділів: статика, кінематика, динаміка, принципи механіки (елементи аналітичної механіки). Така послідовність дозволяє плавно підвести студентів до сприйняття образів теоретичної механіки та розчленити на окремі складові великий об'єм матеріалу, що полегшує студентам засвоєння знань і складання заліку. Розділи "статика" і "кінематика" можна безболісно міняти місцями, що дуже часто практикується з тих чи інших міркувань. Формули і рисунки мають подвійну нумерацію: перша цифра означає розділ, друга — порядковий номер формули чи рисунка в розділі. Важливі формули відмічені вертикальною рискою.
предмет теоретичної механіки Теоретична механіка - одна із основних наук про природу і навколишній світ. Предметом досліджень цієї науки є механічний рух - вічний і нескінченний у своїх проявах. Під механічним рухом розуміється найпростіший рух матерії, який зводиться до зміни положення фізичних тіл у просторі з часом. Для визначення загальних законів механічного руху теоретична механіка широко використовує апарат вищої математики, зокрема векторну алгебру, аналітичну геометрію, диференціювання, інтегрування, теорію диференціальних рівнянь тощо. Основною метою курсу теоретичної механіки у програмі інженерної підготовки студентів немеханічних спеціальностей є вміння описувати мовою математики не лише механічний рух і рівновагу, але й немеханічні явища та процеси, що відбуваються у різних середовищах (твердих, рідких, газоподібних і їх сумішах), та в різних областях знань (хімії, біології, електротехніці тощо). Записати рівняння руху чи рівноваги, встановити основні закономірності і дати їм належне тлумачення - ось та кваліфікація, яку прагне надати майбутньому інженерові теоретична механіка. Крім того, теоретична механіка, як фундаментальна фізико-математична дисципліна, є науковою базою для багатьох дисциплін технічної механіки, до яких найперше належать опір матеріалів, теорія машин і механізмів, деталі машин, машини і обладнання харчових виробництв, а також гідравліка і газова динаміка, теорія пружності і теорія пластичних деформацій, теорія стійкості і теорія автоматичного регулювання та багатьох інших дисциплін. Виходячи з характеру задач, які розв'язує теоретична механіка, її прийнято ділити на три розділи: статику, кінематику, динаміку. Статика вивчає необхідні і достатні умови рівноваги матеріальних тіл під дією прикладених сил. Кінематика розглядає геометричні властивості руху тіл незалежно від сил, що спричиняють цей рух. Динаміка вивчає загальні закони механічного руху тіл під дією прикладених до них сил.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 389; Нарушение авторского права страницы
 Крім величини (модуля) сила характеризується напрямом та точкою прикладання. Отже, сила — величина векторна. Однак слід відзначити дуже важливу особливість сили, що діє на абсолютно тверде тіло. Оскільки тверде тіло під дією сили не деформується, то точка прикладання сили не має суттєвого значення, і дія сили на тіло не зміниться, якщо цю силу прикласти в іншій точці, яка лежить на лінії дії сили. Лінія дії сили — це та лінія, вздовж якої можем рухати (ковзати) вперед чи назад вектор сили (рис. 1.1). Таким чином, сила в теоретичній механіці є ковзним вектором, тобто характеризується величиною, напрямом і лінією дії. Умовно сили будемо позначати прописними буквами латинського алфавіту, над якими ставиться стрілка або рисочка як знак вектора (напр.,
Крім величини (модуля) сила характеризується напрямом та точкою прикладання. Отже, сила — величина векторна. Однак слід відзначити дуже важливу особливість сили, що діє на абсолютно тверде тіло. Оскільки тверде тіло під дією сили не деформується, то точка прикладання сили не має суттєвого значення, і дія сили на тіло не зміниться, якщо цю силу прикласти в іншій точці, яка лежить на лінії дії сили. Лінія дії сили — це та лінія, вздовж якої можем рухати (ковзати) вперед чи назад вектор сили (рис. 1.1). Таким чином, сила в теоретичній механіці є ковзним вектором, тобто характеризується величиною, напрямом і лінією дії. Умовно сили будемо позначати прописними буквами латинського алфавіту, над якими ставиться стрілка або рисочка як знак вектора (напр.,  ).Модуль сили позначатимемо буквою без знака вектора.
).Модуль сили позначатимемо буквою без знака вектора.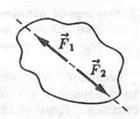 Аксіома 1 (про дві сили): дві сили, що діють на тіло, врівноважуються тільки тоді, коли вони рівні за модулем, протилежні за напрямом і діють вздовж однієї прямої (рис. 1.2).
Аксіома 1 (про дві сили): дві сили, що діють на тіло, врівноважуються тільки тоді, коли вони рівні за модулем, протилежні за напрямом і діють вздовж однієї прямої (рис. 1.2). Аксіома 4 ( про накладання нових в'язей): рівновага твердого тіла не порушиться, якщо накласти на нього нові в'язі.
Аксіома 4 ( про накладання нових в'язей): рівновага твердого тіла не порушиться, якщо накласти на нього нові в'язі. (рис. 1.6);
(рис. 1.6);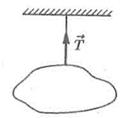
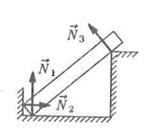 ребро (кут, вістря) — реакція перпендикулярна до тіла або до дотичної до нього в точці контакту (рис. 1.7);
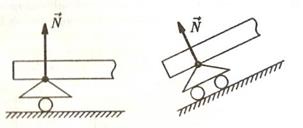
ребро (кут, вістря) — реакція перпендикулярна до тіла або до дотичної до нього в точці контакту (рис. 1.7); , направлена перпендикулярно до цієї поверхні або до дотичної у точці контакту тіла з поверхнею (рис.1.8) У техніці до опори на ідеально гладеньку поверхню прирівнюється опора на катках (рис. 1.9). Реакція катка направлена перпендикулярно до поверхні, по якій котиться каток;
, направлена перпендикулярно до цієї поверхні або до дотичної у точці контакту тіла з поверхнею (рис.1.8) У техніці до опори на ідеально гладеньку поверхню прирівнюється опора на катках (рис. 1.9). Реакція катка направлена перпендикулярно до поверхні, по якій котиться каток;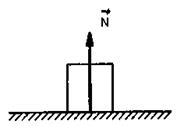

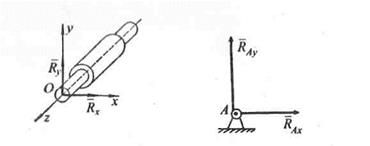
 x і
x і  y, які лежать у площині, перпендикулярній до осі шарніра. Модуль реакції виражається через теорему Піфагора
y, які лежать у площині, перпендикулярній до осі шарніра. Модуль реакції виражається через теорему Піфагора  . Схематично циліндричний шарнір найчастіше зображують у вигляді, показаному на рис. 1.10б;
. Схематично циліндричний шарнір найчастіше зображують у вигляді, показаному на рис. 1.10б;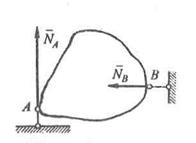
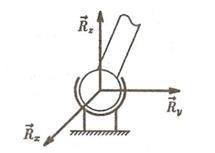 сферичний шарнір - дозволяє тілу, зв'язаному з обоймою, вільно обертатись навколо шарніра, але перешкоджає рухатись поступально у всіх трьох напрямах простору (обмежує три степені вільності тіла) і має три складові реакції
сферичний шарнір - дозволяє тілу, зв'язаному з обоймою, вільно обертатись навколо шарніра, але перешкоджає рухатись поступально у всіх трьох напрямах простору (обмежує три степені вільності тіла) і має три складові реакції  (рис. 1.11);
(рис. 1.11); .
.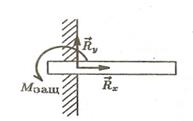 нерухоме защемлення балки (консоль) - виключає будь-яке переміщення балки у площині - і поступальне, і обертальне. Реакція нерухомого защемлення має дві взаємно перпендикулярні складові
нерухоме защемлення балки (консоль) - виключає будь-яке переміщення балки у площині - і поступальне, і обертальне. Реакція нерухомого защемлення має дві взаємно перпендикулярні складові  і
і  та момент защемлення
та момент защемлення  , який протидіє повороту балки в даній площині (рис. 1.13).
, який протидіє повороту балки в даній площині (рис. 1.13).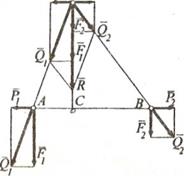 Розглянемо систему двох паралельних сил
Розглянемо систему двох паралельних сил  і
і  , прикладених у точках А і В твердого тіла (рис. 1.15) і направлених в один бік. Для визначення рівнодійної цих сил і точки її прикладання зробимо так: прикладемо у точках А і В дві сили
, прикладених у точках А і В твердого тіла (рис. 1.15) і направлених в один бік. Для визначення рівнодійної цих сил і точки її прикладання зробимо так: прикладемо у точках А і В дві сили  і
і  , рівні за величиною і протилежні за напрямом (від цього стан тіла, згідно з шостою аксіомою статики, не зміниться), Склавши попарно сили
, рівні за величиною і протилежні за напрямом (від цього стан тіла, згідно з шостою аксіомою статики, не зміниться), Склавши попарно сили  і
і  г та
г та  і
і  , одержимо їх рівнодійні
, одержимо їх рівнодійні  та
та  , лінії дії яких перетинаються у точці О.
, лінії дії яких перетинаються у точці О. і
і  у точку О , а потім розкладемо їх на дві їхні попередні окладові
у точку О , а потім розкладемо їх на дві їхні попередні окладові  . (1.8)
. (1.8) перетинає відрізок AB у точці С, яка ділить цей відрізок на частини, обернено пропорційні модулям сил
перетинає відрізок AB у точці С, яка ділить цей відрізок на частини, обернено пропорційні модулям сил (1.9)
(1.9) і
і 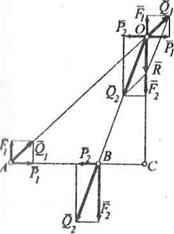
 (1.10)
(1.10) .
. . (1.12)
. (1.12)  . (1.13)
. (1.13) . (1.14)
. (1.14) Плечем
Плечем  називається найкоротша відстань (перпендикуляр) між лініями дії сил пари
називається найкоротша відстань (перпендикуляр) між лініями дії сил пари 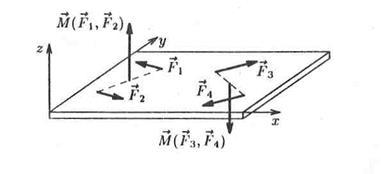
 . (1.15)
. (1.15)
 , (1.16)
, (1.16) . (1.17)
. (1.17)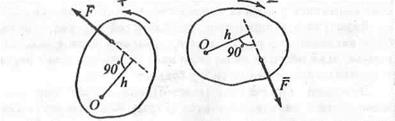


 і точку О (початок координат).
і точку О (початок координат).  на плече h:
на плече h: . (1.24)
. (1.24) );
);  пропорційна степені шорсткості контактуючих поверхонь (пари тертя) і нормальному тиску N (тобто силі, яка притискує поверхні тіл одна до одної):
пропорційна степені шорсткості контактуючих поверхонь (пари тертя) і нормальному тиску N (тобто силі, яка притискує поверхні тіл одна до одної): . (1.35)
. (1.35) , або як тангенс кута нахилу поверхонь при граничній рівновазі (в момент переходу тіла від спокою до руху).
, або як тангенс кута нахилу поверхонь при граничній рівновазі (в момент переходу тіла від спокою до руху). урівноважується реакцією опорної поверхні
урівноважується реакцією опорної поверхні  , а сила натягу пружинного динамометра
, а сила натягу пружинного динамометра  — силою терти
— силою терти  . Коефіцієнт тертя знайдемо так:
. Коефіцієнт тертя знайдемо так: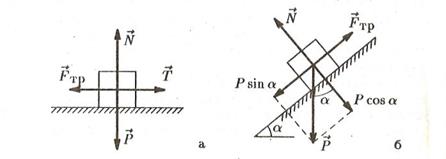
 , або
, або  . (1.36)
. (1.36) лежить на похилій площині. Якщо цю силу ваги розкласти на дві взаємно перпендикулярні складові
лежить на похилій площині. Якщо цю силу ваги розкласти на дві взаємно перпендикулярні складові  і
і  , то у випадку граничної рівноваги
, то у випадку граничної рівноваги , а
, а  .
. або
або  (1.37)
(1.37) , сила тертя ковзання
, сила тертя ковзання  ). Пара сил (
). Пара сил (  ,
,  ) створює обертальний момент у напрямі кочення катка, а пара сил (
) створює обертальний момент у напрямі кочення катка, а пара сил (  ) характеризує момент тертя кочення, який дорівнює добутку нормального тиску
) характеризує момент тертя кочення, який дорівнює добутку нормального тиску  на коефіцієнт тертя кочення
на коефіцієнт тертя кочення  , що являє собою плече пари:
, що являє собою плече пари: . (1.38)
. (1.38) є розмірною величиною (розмірність [м]) і характеризує величину деформації тіл.
є розмірною величиною (розмірність [м]) і характеризує величину деформації тіл. до горизонту, нормальний тиск менший і залежить від кута нахилу (N = Р со s а).
до горизонту, нормальний тиск менший і залежить від кута нахилу (N = Р со s а).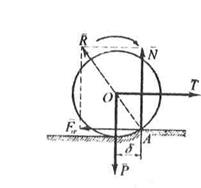
 . Всі ці сили направлені радіально до центру Землі, тобто перетинаються у цьому центрі. Але на практиці ми вважаємо, що сили ваги, які діють на частинки твердого тіла, паралельні між собою. Таке припущення не позначається на наших інженерних розрахунках тому, що відстані між частинками тіл занадто малі в порівнянні з радіусом земної кулі, який становить близько
. Всі ці сили направлені радіально до центру Землі, тобто перетинаються у цьому центрі. Але на практиці ми вважаємо, що сили ваги, які діють на частинки твердого тіла, паралельні між собою. Таке припущення не позначається на наших інженерних розрахунках тому, що відстані між частинками тіл занадто малі в порівнянні з радіусом земної кулі, який становить близько  = 6 400 кілометрів.
= 6 400 кілометрів. і
і  , що мають рівнодійну (рис. 1.25)
, що мають рівнодійну (рис. 1.25)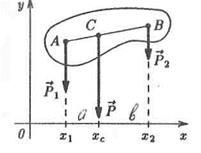
 .
. , (1.39)
, (1.39) . Момент рівнодійної сили
. Момент рівнодійної сили  , (1.40)
, (1.40) .
. - координата точки С. Оскільки із (1.39) маємо
- координата точки С. Оскільки із (1.39) маємо  , то вираз в останній дужці цього напису дорівнює нулю, і ми одержимо
, то вираз в останній дужці цього напису дорівнює нулю, і ми одержимо , (1.41)
, (1.41) і
і  .
. . (1.42)
. (1.42) . (1.43)
. (1.43) . (1.44)
. (1.44) маємо записати
маємо записати . (1.45)
. (1.45) будь-якої k-ої частинки тіла пропорційна об'єму
будь-якої k-ої частинки тіла пропорційна об'єму  цієї частинки, а вага всього тіла пропорційна об'єму V тіла:
цієї частинки, а вага всього тіла пропорційна об'єму V тіла: , a
, a  .
. - вага одиниці об'єму.
- вага одиниці об'єму. і
і  у формули для визначення координат центра ваги, ми бачимо, що спільний множник
у формули для визначення координат центра ваги, ми бачимо, що спільний множник  в чисельнику і в знаменнику виноситься за знак суми і скорочується. У результаті одержимо формули для визначення центра ваги тіла як центра ваги об'ємів
в чисельнику і в знаменнику виноситься за знак суми і скорочується. У результаті одержимо формули для визначення центра ваги тіла як центра ваги об'ємів . (1.46)
. (1.46) , (1.47)
, (1.47) . (1.48)
. (1.48) , (2.30)
, (2.30) .
. ,
, .
. , (2.31)
, (2.31) . (2.32)
. (2.32) або
або  . (2.33)
. (2.33) . (2.34)
. (2.34) матимемо формулу
матимемо формулу . (2.35)
. (2.35) , (2.58)
, (2.58)  - кут повороту тіла в радіанах (пригадаймо, що довжина дуги кола дорівнює
- кут повороту тіла в радіанах (пригадаймо, що довжина дуги кола дорівнює  ).
). (2.59)
(2.59) . (2.60)
. (2.60) на радіус R. Формула (2.60) називається формулою Ейлера для визначення швидкості будь-якої точки тіла при його обертанні.
на радіус R. Формула (2.60) називається формулою Ейлера для визначення швидкості будь-якої точки тіла при його обертанні. і радіус-вектора
і радіус-вектора  точки.
точки. , який утворюють вектор кутової швидкості
, який утворюють вектор кутової швидкості 
 . (2.61)
. (2.61) . (2.62)
. (2.62) . (2.63)
. (2.63) , (2.64)
, (2.64) визначається за правилом векторного добутку двох векторів
визначається за правилом векторного добутку двох векторів  i
i  точок А і В паралельні, направлені в один бік, перпендикулярні до відрізка АВ і рівні за модулем (модуль
точок А і В паралельні, направлені в один бік, перпендикулярні до відрізка АВ і рівні за модулем (модуль  дорівнює модулю
дорівнює модулю  ), то провівши пряму, яка з'єднує кінці векторів
), то провівши пряму, яка з'єднує кінці векторів 

 ), a миттєва кутова швидкість
), a миттєва кутова швидкість  .
. і рухому систему координат
і рухому систему координат  , незмінно зв'язану з тілом (або середовищем).
, незмінно зв'язану з тілом (або середовищем). до точки М проведемо радіус-вектор
до точки М проведемо радіус-вектор  , а з точки
, а з точки  рухомої системи координат - радіус-вектор
рухомої системи координат - радіус-вектор  . Рух точки О відносно нерухомої точки
. Рух точки О відносно нерухомої точки  . Очевидно, що в кожну мить справедлива рівність
. Очевидно, що в кожну мить справедлива рівність
 (2.94)
(2.94) , (2.95)
, (2.95) - одиничні вектори рухомої системи координат,
- одиничні вектори рухомої системи координат,  - проекції радіуса-вектора
- проекції радіуса-вектора  . (2.112)
. (2.112) (переносний рух тіла поступальний);
(переносний рух тіла поступальний); (точка в дану мить зупинилась);
(точка в дану мить зупинилась); (вектор
(вектор  паралельний вектору
паралельний вектору  ).
). визначається або згідно з правилом векторного добутку двох векторів, або за допомогою правила Жуковського.
визначається або згідно з правилом векторного добутку двох векторів, або за допомогою правила Жуковського. (2.113)
(2.113) перпендикулярний до площини, яку створюють вектори
перпендикулярний до площини, яку створюють вектори  Згідно з правилом Жуковського, для визначення напряму прискорення Коріоліса потрібно повернути вектор
Згідно з правилом Жуковського, для визначення напряму прискорення Коріоліса потрібно повернути вектор 
 повернути на
повернути на  у напрямі обертання тіла (див. рис. 2.24а і рис. 2.25б).
у напрямі обертання тіла (див. рис. 2.24а і рис. 2.25б). , (3.4)
, (3.4) . Підставивши ці величини в диференціальні рівняння (3.2), знайдемо невідомі сили. Якщо рух точки заданий натуральним способом, то задача зводиться до визначення прискорень
. Підставивши ці величини в диференціальні рівняння (3.2), знайдемо невідомі сили. Якщо рух точки заданий натуральним способом, то задача зводиться до визначення прискорень  і
і  та подальшого визначення сил.
та подальшого визначення сил. );
); ;
; шлях і значення кінцевої швидкості) та підставити ці величини в одержані в п. 7 закони зміни координат і швидкості;
шлях і значення кінцевої швидкості) та підставити ці величини в одержані в п. 7 закони зміни координат і швидкості; . (3.19)
. (3.19) - коефіцієнт пропорційності, який визначається експериментально (коефіцієнт так званого в'язкого тертя або рідинного опору).
- коефіцієнт пропорційності, який визначається експериментально (коефіцієнт так званого в'язкого тертя або рідинного опору). . (3.20)
. (3.20) . (3.21)
. (3.21) . (3.22)
. (3.22) . (3.23)
. (3.23) :
: . (3.24)
. (3.24) . (3.25)
. (3.25) . (3.26)
. (3.26) , можуть мати місце такі три випадки затухаючих коливань:
, можуть мати місце такі три випадки затухаючих коливань: - великий опір;
- великий опір; - граничний випадок;
- граничний випадок; - малий опір.
- малий опір. У першому випадку
У першому випадку  функція
функція  швидко прямує до нуля, тобто має місце неперіодичний (аперіодичний) рух точки. Характер аперіодичного руху точки залежить від початкових умов (рис. 3.3).
швидко прямує до нуля, тобто має місце неперіодичний (аперіодичний) рух точки. Характер аперіодичного руху точки залежить від початкових умов (рис. 3.3).
 . (3.27)
. (3.27) , (3.28)
, (3.28) ,
, . (3.29)
. (3.29) ; величина
; величина  є частотою затухаючих коливань.
є частотою затухаючих коливань. , (3.30)
, (3.30) з якого видно, що має місце гармонічний рух з деяким затуханням (при
з якого видно, що має місце гармонічний рух з деяким затуханням (при  ). Графік таких коливань зображено на рис. 3.4, який показує, що амплітуда коливань поступово зменшується, прямуючи до нуля.
). Графік таких коливань зображено на рис. 3.4, який показує, що амплітуда коливань поступово зменшується, прямуючи до нуля. ,
, . (3.31)
. (3.31) . (3.32)
. (3.32) , який визначає період вільних коливань точки, то побачимо, що
, який визначає період вільних коливань точки, то побачимо, що  , тобто період затухаючих коливань більший за період вільних коливань. Цією закономірністю користувався Кулон для визначення в'язкості рідин: підвісивши на пружині тонку пластину він примушував її коливатись у повітрі, а потім переносив її у ту рідину, в'язкість якої вимірювалась, і порівнював період коливань.
, тобто період затухаючих коливань більший за період вільних коливань. Цією закономірністю користувався Кулон для визначення в'язкості рідин: підвісивши на пружині тонку пластину він примушував її коливатись у повітрі, а потім переносив її у ту рідину, в'язкість якої вимірювалась, і порівнював період коливань. , яку вони назвали "кількість руху". Хрістіан Гюйгенс (1629-1695) при вивченні явища удару ввів поняття добутку маси на квадрат швидкості
, яку вони назвали "кількість руху". Хрістіан Гюйгенс (1629-1695) при вивченні явища удару ввів поняття добутку маси на квадрат швидкості  , яке Лейбніц назвав "живою силою" і відстоював думку, що ця величина повністю характеризує динамічні властивості тіл і являє собою єдину міру механічного руху. Гаспар Коріоліс (1792-1843) запропонував "живою силою" називати величину
, яке Лейбніц назвав "живою силою" і відстоював думку, що ця величина повністю характеризує динамічні властивості тіл і являє собою єдину міру механічного руху. Гаспар Коріоліс (1792-1843) запропонував "живою силою" називати величину  , яку в сучасній термінології ми знаємо як кінетичну енергію.
, яку в сучасній термінології ми знаємо як кінетичну енергію. і кінетична енергія
і кінетична енергія  дорівнює скалярному добутку цих величин
дорівнює скалярному добутку цих величин ,
, . (3.66)
. (3.66) – кут між напрямом сили
– кут між напрямом сили  , а проекції елементарного переміщення
, а проекції елементарного переміщення  ,можемо записати вираз для елементарної роботи у вигляді
,можемо записати вираз для елементарної роботи у вигляді . (3.67)
. (3.67) . Тоді матимемо:
. Тоді матимемо: , (3.68)
, (3.68) - елементарне переміщення точки.
- елементарне переміщення точки. <
<  ), то робота додатня;
), то робота додатня; ) - робота сили дорівнює нулю;
) - робота сили дорівнює нулю; <
<  ) - робота сили від'ємна.
) - робота сили від'ємна. до
до  буде інтегральна сума елементарних робіт
буде інтегральна сума елементарних робіт . (3.69)
. (3.69) , на яку діє сила ваги
, на яку діє сила ваги  , перемістилась із положення
, перемістилась із положення  , в положення
, в положення  (рис. 3.7).
(рис. 3.7). . (3.70)
. (3.70) , то повна робота
, то повна робота . (3.71)
. (3.71) Тут
Тут  - висота, на яку опустилася точка під дією сили ваги
- висота, на яку опустилася точка під дією сили ваги  . Якщо, незважаючи на дію сили
. Якщо, незважаючи на дію сили  .
. , протилежна цьому переміщенню. Оскільки проекції вектора сили
, протилежна цьому переміщенню. Оскільки проекції вектора сили  на осі координат
на осі координат  , а проекція
, а проекція  , то елементарна робота сили пружності
, то елементарна робота сили пружності . (3.72)
. (3.72) , (3.73)
, (3.73) . (3.74)
. (3.74) , то вираз для потужності сили матиме вигляд
, то вираз для потужності сили матиме вигляд , (3.79)
, (3.79) , (3.80)
, (3.80) ;
; ;
; -ту точку тіла з масою
-ту точку тіла з масою  і радіусом-вектором
і радіусом-вектором  . Момент інерції
. Момент інерції  . (3.87)
. (3.87) , (3.88)
, (3.88) . (3.89)
. (3.89) , або
, або  . (3.90)
. (3.90) дорівнює
дорівнює . (3.91)
. (3.91) точки від осі виражається через координати точки
точки від осі виражається через координати точки . (3.92)
. (3.92) . (3.93)
. (3.93) . (3.94)
. (3.94) і
і  . (3.95)
. (3.95) , (3.96)
, (3.96) . (3.97)
. (3.97) . (3.98)
. (3.98) . (3.99)
. (3.99) - маса тіла,
- маса тіла,  (3.100)
(3.100)
 (4.1)
(4.1) . (4.2)
. (4.2) , взятий зі знаком"мінус", теж має розмірність сили, то цю сипу було названо даламберовою силою інерції
, взятий зі знаком"мінус", теж має розмірність сили, то цю сипу було названо даламберовою силою інерції . (4.3)
. (4.3) . (4.4)
. (4.4) . (4.5)
. (4.5) . (4.6)
. (4.6) і
і  - кутова швидкість, і кутове прискорення тіла.
- кутова швидкість, і кутове прискорення тіла. (4.7)
(4.7) , або на будь-які інші осі.
, або на будь-які інші осі. .
. або
або  .
. або
або  .
. явно не входить, а нестаціонарні - до рівнянь яких час входить у явному вигляді. Наведені вище приклади рівнянь в'язей математичного маятника і колеса є прикладами стаціонарних в'язей. Прикладом нестаціонарної в'язі може бути математичний маятник, підвішений на нитці, яка змінює свою довжину (втягується в отвір, що співпадає з точкою підвісу).
явно не входить, а нестаціонарні - до рівнянь яких час входить у явному вигляді. Наведені вище приклади рівнянь в'язей математичного маятника і колеса є прикладами стаціонарних в'язей. Прикладом нестаціонарної в'язі може бути математичний маятник, підвішений на нитці, яка змінює свою довжину (втягується в отвір, що співпадає з точкою підвісу). допускає інтегрування х =
допускає інтегрування х =  .
.