
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
СИСТЕМА ЗБІЖНИХ СИЛ. УМОВИ РІВНОВАГИ
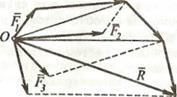
Однією з задач статики є перетворення систем сил, внаслідок чого дана система сил замінюється іншою системою чи силою еквівалентною даній. Розглянемо у цьому плані збіжну просторову систему сил (рис. 1.14а). З другої аксіоми про рівнодійну двох сил, лінії дії яких перетинаються, ми зробили очевидний висновок, що коли маємо систему з декількох збіжних сил то їх рівнодійна знаходиться за правилом векторного додавання і являє собою замикаючу сторону силового многокутника. Рівнодійна для п збіжних сил (рис. 1.14б) дорівнює Тут k =1,2, ..., n, де п — кількість сил системи.
б Рис. 1.13. Отже збіжна система сил зводиться до однієї сили — рівнодійної Розкладемо вектор рівноцінної
Тут У проекціях на декартові осі координат вираз (1.1) набуває вигляду де Для аналітичного визначення модуля рівнодійної
Другою (основною) задачею статики є з'ясування необхідних умов, яким повинна задовольняти система сил, щоб тіло перебувало у стані рівноваги. Визначимо ці умови для збіжної системи сил. Якщо при побудові силового многокутника виявиться, що кінець вектора останньої n-ої сили збігається з початком вектора першої сили, тобто силовий многокутник буде замкнутим, то рівнодійна такої системи сил дорівнює нулю. У цьому випадку дія збіжної системи сил на тіло діє сила еквівалентна нулю і ми можемо записати
Таким чином, геометричною (або векторною) умовою рівноваги збіжної системи сил є умова рівності нулю її рівнодійної. Можемо сформулювати й таке правило: для рівноваги збіжної системи сил необхідно і достатньо, щоб силовий многокутник був замкнутий. Проекції виразу (1.5) на декартові осі координат дають нам аналітичні умови рівноваги збіжної просторової системи сил:
Вони читаються так: для рівноваги збіжної просторової системи сил необхідно і достатньо, щоб алгебраїчна сума проекцій всіх сил на три координатні осі дорівнювала нулю. Якщо всі сили збіжної системи сил діють в одній площині, то для рівноваги збіжної плоскої системи сил необхідна рівність нулю проекцій всіх сил на дві координатні осі:
Умови (1.6) і (1.7) називаються аналітичними умовами рівноваги збіжної системи сил і застосовуються при розв'язуванні задач статики для визначення невідомих сил і реакцій в'язей.
СИСТЕМА ПАРАЛЕЛЬНИХ СИЛ. ДОДАВАННЯ ДВОХ ПАРАЛЕЛЬНИХ СИЛ Системи паралельних сил, як і збіжні системи, є окремим випадком довільних систем сил. У залежності від просторової орієнтації, системи паралельних сил поділяють на плоскі і просторові. У цьому розділі ми розглянемо способи перетворення (додавання) двох паралельних сил, направлених в один бік та в різні боки. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 344; Нарушение авторского права страницы
 або
або  (1.1)
(1.1)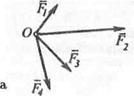
 , яка дорівнює векторній сумі всіх сил системи.
, яка дорівнює векторній сумі всіх сил системи. (1.2)
(1.2) — одиничні орти координатних осей, Rx, Ry, Rz - проекції вектора
— одиничні орти координатних осей, Rx, Ry, Rz - проекції вектора  ,
,  ,
,  (1.3)
(1.3) — суми проекцій всіх сил на координатні осі.
— суми проекцій всіх сил на координатні осі. (1.4)
(1.4) (1.5)
(1.5) . (1.6)
. (1.6) ,
,  . (1.7)
. (1.7)