
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Информация из ФГОС, относящаяся к дисциплинеСтр 1 из 18Следующая ⇒
Составитель программы Вокин Александр Иннокентьевич, доцент кафедры Оборудования и автоматизации машиностроения, к. х. н.
Иркутск 2013 г. Информация из ФГОС, относящаяся к дисциплине Вид деятельности выпускника Дисциплина охватывает круг вопросов относящихся к виду деятельности выпускника: научно – исследовательскому; проектно-конструкторскому.
Задачи профессиональной деятельности выпускника В дисциплине рассматриваются указанные в ФГОС задачи профессиональной деятельности выпускника: Научно-исследовательская деятельность: - теоретические и (или) экспериментальные исследования, проводимые в целях изыскания принципов и путей совершенствования существующих объектов профессиональной деятельности (далее изделий), обоснования их технических характеристик, определения условий применения, эксплуатации и ремонта; - патентные исследования, изучение на патентную чистоту объектов интеллектуальной собственности, используемых при выполнении НИР; - разработка моделей (математических, физических и др.) – изделий, воспроизводящих или имитирующих конкретные свойства заданного изделия или его составной части и изготовленных для проверки принципа его действия и определения отдельных характеристик; - разработка макетов – упрощенных воспроизведений в определенном масштабе изделия или его составной части, на котором исследуют отдельные характеристики изделия, а также оценивают правильность принятых технических и конструктивных решений. Проектно-конструкторская деятельность: На этапе эскизного проектирования (Эскизный проект - «ЭП»): - разработка варианта возможного принципиального решения по структуре, функционированию, конструкции, алгоритмическому и программному обеспечению изделия; - патентные исследования; - разработка технологической части варианта с обоснованием его технологической реализуемости; - оценка разрабатываемого варианта изделия по экономической эффективности и необходимому метрологическому обеспечению; - обоснование предлагаемых мер по обеспечению безопасности эксплуатации варианта изделия. На этапе технического проектирования (Технический проект - ТП»): - разработка проектной конструкторской документации технического проекта (ТП) по составным частям изделия; - разработка проектной программной документации технического проекта (ТП) по составным частям изделия; На этапе выпуска рабочей документации опытного образца, его изготовления и предварительных испытаний (опытный образец, «РКД» и «РПД»): - разработка рабочей конструкторской документации по составным частям опытного образца изделия; - выпуск эксплуатационной документации составных частей опытного образца изделия; - проведение предварительных испытаний составных частей опытного образца изделия по заданным программам и методикам.
Место дисциплины в структуре ООП Для изучения дисциплины необходимо освоение содержания дисциплин: элементарная и высшая математика, физика, информатика.
Знания и умения, приобретаемые студентами после освоения содержания дисциплины, будут использоваться в: "Кинематика и динамика устройств автоматизации производственных процессов", "Моделирование и исследование роботов и робототехнических систем", "Проектирование робототехнических и мехатронных систем".
Содержание дисциплины Перечень основных разделов и тем дисциплины Раздел 1. Введение. Сущность управления, необходимость его автоматизации. Классификация систем автоматического управления. Раздел 2. Передаточные функции. Определение и физический смысл передаточной функции. Передаточные функции простейших систем. Раздел 1. Введение.
В настоящее время возможности повышения точности технологических процессов за счет усовершенствования самих технологических процессов во многих случаях исчерпаны. Повышения точности можно добиться за счет совершенствования систем автоматического управления (САУ). К настоящему времени разработано большое количество различных принципов управления, улучшающих те или иные показатели технологических процессов в машиностроении.
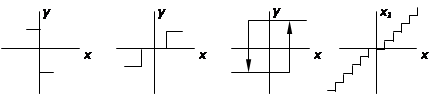
Классификация САУ По принципу управления САУ подразделяются на - разомкнутые; - замкнутые; - комбинированные. В разомкнутых САУ управляющее воздействие задаётся на основании цели управления, характеристик объекта и известных внешних воздействий, но без учёта истинного значения управляемой переменной. Если в этих САУ осуществляется компенсация возмущающего воздействия, то этот принцип управления называется управлением по возмущению. В замкнутых САУ управляющее воздействие формируется в непосредственной зависимости от управляемой величины за счет создания обратной связи. Обратной связью называется цепь, соединяющая выход какого-либо звена или всей системы с их входом или непосредственно, или посредством других звеньев. Этот принцип управления называется управлением по отклонению. Если одновременно используются оба принципа управления (по возмущению и отклонению), то такая система называется системой комбинированного принципа действия (комбинированной системой). По цели регулирования САУ подразделяются на - системы стабилизации; - системы программного регулирования; - следящие системы. Системой стабилизации называют такую САУ, которая поддерживает постоянное значение управляемой величины [ y ( t )= const ]. Системой программного регулирования называется такая САУ, которая изменяет выходную переменную по заранее заданному закону. Следящими называются такие САУ, которые воспроизводят изменение управляемой величины в соответствии с изменением задающего воздействия с неизвестным законом изменения. По характеру сигналов Если подать на звено входной сигнал, то в выходном сигнале возникает переходный процесс. Если звено устойчивое, то при постоянном входном сигнале через некоторое время устанавливается постоянный выходной сигнал. Зависимость выходного сигнала от входного в установившемся режиме называется статической характеристикой данного звена. Системой непрерывного действия называется такая САУ, в каждом звене которой при непрерывном входном воздействии выходная переменная также является непрерывной. Ниже приведены статические характеристики непрерывных звеньев.
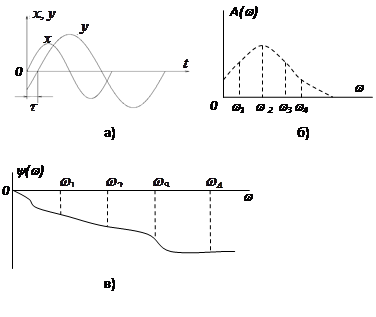
Рис. 1 Примеры статических характеристик непрерывных звеньев. х, у – входной и выходной сигналы
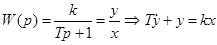
Импульсной называется такая САУ, в которой имеется хотя бы одно звено, у которого при непрерывном входном сигнале выходной сигнал имеет вид последовательности импульсов (Рис. 2).
Рис. 2 Импульсное звено. х, у – входной и выходной сигналы
Релейной называется такая САУ, в которой хотя бы в одном звене при непрерывном изменении входной переменной выходная переменная в некоторых точках процесса, зависящих от значения входной переменной, изменяется скачком.
Рис. 3 Примеры статических характеристик релейных звеньев. х, у – входной и выходной сигналы
Основные типовые звенья Позиционные звенья. 1. Пропорциональное звено. 2. Апериодическое звено первого порядка 3. Консервативное, колебательное, апериодическое звенья второго порядка где
При 4. Пропорционально - дифференцирующее звено Интегрирующие звенья. 1. Идеальное интегрирующее звено 2. Интегрирующее звено с замедлением 3. Изодромное звено (ПИ-регулятор) Дифференцирующие звенья. 1. Идеальное дифференцирующее звено 2. Реальное дифференцирующее звено (звено с замедлением)
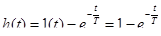
Временные характеристики Временные характеристики описывают переходные процессы в звеньях. Переходные процессы – это характер изменения выходных переменных при изменении входных сигналов или начальных условий. При устойчивости звеньев переходные процессы завершаются новыми установившимися значениями. Характеристика – графическое изображение функции. Временные динамические характеристики подразделяются на перехόдные характеристики и функции веса, другими словами, импульсные переходные характеристики. Переходная функция h ( t ) представляет собой переходный процесс на выходе звена, возникающий при подаче на его вход единичного ступенчатого воздействия ( Функцией веса w ( t ) называется реакция на выходе звена при подаче на его вход единичной импульсной функции Единичной импульсной функцией (функцией Дирака) называется импульс нулевой длительности, бесконечной амплитуды и единичной площади. Установим связь между временными характеристиками. Легко убедиться в том, что
Рис. 4. Переходная характеристика На основании формулы Коши и зависимости (1) можно получить На рис. 5 соотнесены
Рис. 5. Весовая характеристика
Переходные функции используются в структурных схемах для обозначения соответствующих звеньев.
Частотные характеристики
Частотные характеристики описывают реакцию на выходе звена в установившемся режиме при подаче на вход звена синусоидального сигнала. Будем рассматривать следующие частотные характеристики: - амплитудно-фазовая частотная характеристика (АФЧХ), - амплитудная частотная характеристика (АЧХ), - фазовая частотная характеристика (ФЧХ), - логарифмическая амплитудная частотная характеристика (ЛАЧХ), - логарифмическая фазовая частотная характеристика (ЛФЧХ). Частотные характеристики получаются из передаточных функций заменой оператора дифференцирования Если обычная передаточная функция обозначается Выражение (33) можно представить без мнимости в знаменателе двумя способами: 1) числитель и знаменатель умножить на функцию, комплексно сопряжённую знаменателю; 2) представить выражение (33) в показательной форме. Для этого надо модуль числителя разделить на модуль знаменателя, а из аргумента числителя вычесть аргумент знаменателя. Для первого и второго случаев будем иметь где
Взаимосвязь между перечисленными переменными представлена на рисунке 6.
Рис. 6. Взаимосвязь составляющих частотной передаточной функции.
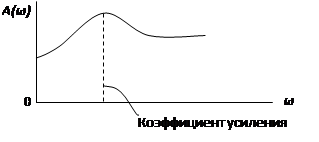
В ТАУ АЧХ показывает, как изменяется амплитуда сигнала на каждой частоте при его прохождении через звено. АЧХ равна зависимости от частоты отношения амплитуды выходного сигнала к амплитуде входного сигнала.
Рис. 7.
Рис. 8.
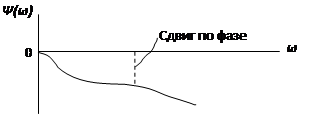
ФЧХ – зависимость от частоты сдвига по фазе выходного сигнала по отношению к входному сигналу. Рассмотрим экспериментальное определение АЧХ и ФЧХ. Пусть
Схема 5.
Для различных значений частоты
Рис. 9.
Логарифмические характеристики введены для упрощения расчётов и графических построений при исследовании САУ. ЛАЧХ обозначается ЛАЧХ строится в логарифмических координатах, как это показано на рис. 10. На рис. 10 Декада – единица измерения, соответствующая изменению частоты в 10 раз. На частоте среза Принято полагать, что если
Рис. 10.
Совокупность частот, где ЛФЧХ строится в полулогарифмическом масштабе (рис. 11).
Рис. 11.
Раздел 5. Правила преобразования структурных схем.
Критерий Михайлова Для его применения необходимо иметь характеристический полином Подставим в уравнение (59) вместо где или Критерий Михайлова является графическим критерием. Для его применения на комплексной плоскости строится кривая Михайлова. На рис. 17 показаны кривые Михайлова для систем различных порядков n, соответствующие устойчивым системам. Для того чтобы система n -ого порядка была устойчивой, необходимо и достаточно, чтобы кривая Михайлова проходила последовательно против часовой стрелки n четвертей при изменении частоты Если кривая Михайлова будет проходить через начало координат, то система будет находиться на границе устойчивости (рис. 18).
Рис. 17. Кривые Михайлова для устойчивых систем различных порядков.
Критерий Найквиста Этот критерий позволяет судить об устойчивости замкнутой системы по АФЧХ разомкнутой системы. Для применения этого критерия система приводится к виду с единичной обратной связью, показанному на схеме 11.
Схема 11
На схеме 11 При таком представлении передаточной функции При Для реальных систем имеет место соотношение Передаточная функция замкнутой САУ имеет вид Для получения характеристического уравнения надо знаменатель приравнять нулю, то есть Подставим в уравнение (66) Значение Таким образом, если АФЧХ разомкнутой системы при изменении частоты от 0 до ∞ будет проходить через точку (-1; j0), то система будет находиться на границе устойчивости. Будем рассматривать две ситуации: а) система в разомкнутом состоянии устойчива; б) система в разомкнутом состоянии неустойчива. Случай а): Для того чтобы замкнутая система была устойчива, необходимо и достаточно, чтобы при изменении частоты от 0 до бесконечности АФЧХ разомкнутой системы не охватывала точку с координатами (-1; j0). Если АФЧХ будет проходить через эту точку, то замкнутая САУ будет находиться на границе устойчивости. Если АФЧХ будет охватывать точку (-1; j0), то замкнутая САУ будет неустойчивой. АФЧХ для статической разомкнутой системы (
На рисунках 20, 21: Случай б): система в разомкнутом состоянии неустойчива. Тогда критерий Найквиста формулируется так: Для того чтобы система, неустойчивая в разомкнутом состоянии, была устойчива в замкнутом состоянии, необходимо и достаточно, чтобы при изменении частоты от 0 до бесконечности АФЧХ разомкнутой системы пересекала отрицательную действительную полуось левее точки с координатами (-1; j0) сверху вниз на k раз больше числа пересечений в обратном направлении, где k – число корней характеристического уравнения разомкнутой системы с положительной вещественной частью. Основные нелинейные звенья Наиболее часто встречаются следующие нелинейные звенья (правее статических характеристик даны синусоидальный входной сигнал
Рис. 30. Звено с ограничением.
Рис. 31. Звено с зоной нечувствительности.
Рис. 32. Двухпозиционное реле с Рис. 33. Трехпозиционное реле с зоной нечувствительности зонами нечувствительности
Рис. 34. Звено с мертвым ходом.
Метод фазового пространства Состояние САУ определяется рядом координат. Например, систему где Систему уравнений можно определить координатами Минимальное количество координат, полностью определяющих состояние системы, равно порядку системы. Вектор (матрица-столбец или матрица-строка), составленный из координат системы, полностью определяющих её состояние, называется вектором состояния системы. Например, для системы (110) вектор состояния Фазовое пространство – это пространство в прямоугольной системе координат, осями которой являются элементы вектора состояния. Для системы второго порядка это фазовая плоскость. Для системы третьего порядка это трёхмерное фазовое пространство и т.д. Состоянию системы в каждый момент времени соответствует определённая точка в фазовом пространстве. Эта точка называется изображающей точкой. При изменении состояния системы изображающая точка перемещается, описывая траекторию, которая называется фазовой траекторией. Для временной привязки процесса в отдельных точках фазовой траектории проставляется время, которому эта точка соответствует. Рассмотрим построение фазовых траекторий системы второго порядка где
Рис. 35. Переходные процессы и фазовые траектории линейной системы второго порядка.
Для построения фазовых траекторий, соответствующих трём переходным процессам, представленным на рис. 35, надо для ряда моментов времени по рис. 35а, 35б определить значения
Гармоническая линеаризация Метод гармонической линеаризации – это метод исследования предельных циклов. Он позволяет определить условия существования и параметры возможных в нелинейных системах автоколебаний. Предельные циклы в фазовом пространстве системы разделяют его на области затухающих и расходящихся процессов. Между этими областями существуют предельные циклы. Поэтому знание параметров предельных циклов и их устойчивости или неустойчивости позволяет представить картину всех возможных процессов в системе и тем самым сделать заключение об устойчивости системы.
Порядок выполнения работы 1.1. Собрать схему статической САУ.
Параметры задать следующим образом: 1.2. Подать на вход ступенчатое задающее воздействие 1.3. Подать на вход ступенчатое возмущающее воздействие 1.4. Увеличить в два раза коэффициент передачи 1.5. Увеличить в два раза коэффициент передачи 1.6. Сделать количественные выводы о зависимости статизмов по задающему и возмущающему воздействиям от величин коэффициентов 1.7. Определить величины статизмов Используемое оборудование и средства: персональный компьютер, программа моделирования свойств САУ. Требования к отчётным материалам: 1. Цель работы. 2. Структурная схема САУ. 3. Описание хода эксперимента. 4. Результаты измерений и графики. 5. Анализ результатов и выводы. 6. Аналитический расчет характеристик. Методические указания: работа выполняется студентами за 4 часа аудиторных занятий.
Порядок выполнения работы: 2.1. Собрать схему астатической САУ. Параметры те же, что в 1.1.
2.2. Выполнить задание 1.2. 2.3. Выполнить задание 1.3. 2.4. Сделать вывод о наличии астатизма по одному из воздействий. 2.5. Поменять звенья местами и повторить задания 2.2 - 2.3. 2.6. Сделать вывод о месте включения интегрирующего звена для получения астатизма по возмущению. 2.7. Определить величины статизмов Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы: 3.1. Использовать схему и параметры астатической САУ из задания 2.1. 3.2. Подать на вход растущий с постоянной скоростью задающий сигнал 3.3. Увеличить в два раза коэффициент передачи 3.4. Увеличить в два раза коэффициент передачи 3.5. Сделать количественные выводы о зависимости добротности по скорости относительно задающего воздействия от величин коэффициентов 3.6. Определить добротность Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы: 4.1. Собрать схему САУ, состоящую из одного идеального интегрирующего звена. Использовать коэффициент передачи
4.2. Подать на вход единичное ступенчатое воздействие 4.3. Подать на вход единичное импульсное воздействие 4.4. Подать на вход гармоническое воздействие 4.5. Получить переходные и частотные характеристики звена в аналитическом виде и сравнить их с полученными в п.п. 4.2 – 4.4. Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы: 5.1. Собрать схему САУ, состоящую из одного апериодического звена первого порядка.
Использовать коэффициент передачи 5.2. Выполнить задание 4.2. 5.3. Выполнить задание 4.3. 5.4. Выполнить задание 4.4. 5.5. Получить переходные и частотные характеристики звена в аналитическом виде и сравнить их с полученными в п.п. 5.2 – 5.4. Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы: 6.1. Собрать схему САУ, состоящую из одного реального дифференцирующего звена.
Коэффициент передачи 6.2. Выполнить задание 4.2. 6.3. Выполнить задание 4.3. 6.4. Выполнить задание 4.4. 6.5. Получить переходные и частотные характеристики звена в аналитическом виде и сравнить их с полученными в п.п. 6.2 – 6.4. Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы:
Коэффициент передачи 7.2. Выполнить задание 4.2. 7.3. Выполнить задание 4.3. 7.4. Выполнить задание 4.4. 7.5. Получить переходные и частотные характеристики звена в аналитическом виде и сравнить их с полученными в п.п. 7.2 – 7.4. Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы: 8.1. Собрать схему статической САУ с каналом компенсации возмущения.
Параметры задать следующим образом: 8.2. Подать на вход ступенчатое возмущающее воздействие 8.3. Изменяя коэффициент передачи канала компенсации 8.4. Определить требуемое значение Методические указания: работа выполняется студентами за 2 часа аудиторных занятий.
Порядок выполнения работы: 9.1. Собрать схему упрощенной модели САУ следящей подачи копировально-фрезерного станка, состоящей из безинерционного датчика рассогласования, усилителя напряжения, электродвигателя и механизма, преобразующего вращательное движение вала в поступательное движение фрезы.
Параметры взять следующими: 9.2. Подать на вход единичное ступенчатое воздействие 9.3. Подать на вход растущий с постоянной скоростью сигнал 9.4. Увеличить незначительно коэффициент усиления усилителя 9.5. Увеличивая 9.6. Пользуясь критерием устойчивости Найквиста для линейных САУ, аналитически определить величину критического коэффициента усиления 9.7. Сделать вывод о противоречивости требований к коэффициенту усиления Методические указания: работа выполняется студентами за 8 часов аудиторных занятий.
Порядок выполнения работы: 10.1. Собрать схему упрощенной модели САУ следящей подачи копировально-фрезерного станка с жесткой обратной связью, охватывающей усилитель.
Параметры задать те же, что и в п. 9.1 (кроме коэффициента передачи усилителя 10.2. Подать на вход единичное ступенчатое воздействие 10.3. Постепенно уменьшая а (т.е. делая его отрицательным) и повторяя п. 10.2, определить экспериментально критическое значение коэффициента передачи жесткой отрицательной обратной связи 10.4. Пользуясь критерием устойчивости Михайлова для линейных САУ, аналитически определить величину 10.5. Сделать вывод о стабилизирующем влиянии местной отрицательной обратной связи, охватывающей усилитель. Методические указания: работа выполняется студентами за 8 часов аудиторных занятий.
Пример решения задачи
Определить уравнение движения одномассовой механической системы с I степенью свободы при наличии демпфирования. Учесть, что сила сопротивления пропорциональна первой степени скорости. Известно: m - масса груза; с - жесткость пружины;
Решение
Составим дифференциальное уравнение движения системы.
a) рассмотрим первый метод решения уравнения (1). Составим характеристическое уравнение
Определим его корни
По этим корням находим решение дифференциального уравнения (1)
или в амплитудной форме
Чтобы определить постоянные интегрирования
Получим : Искомая функция будет иметь вид
b) рассмотрим второй метод решения уравнения (1) Запишем функцию x(t) и её производные в изображениях по Лапласу.
Подставим это в дифференциальное уравнение (1)
 
Чтобы воспользоваться таблицей изображений и перейти к оригиналам, преобразуем слагаемые, стоящие в формуле (4)
Искомый оригинал x(t) имеет вид
Задачи для самостоятельной работы
1. Следящая автоматическая система описывается уравнением
Постоянная времени T=0,005 с, коэффициент усиления Ответ: 2. Передаточная функция разомкнутой системы равна
Найти уравнение движения замкнутой системы, если на ее вход подано единичное ступенчатое воздействие и начальные условия нулевые. Ответ: 3. Передаточная функция разомкнутой системы равна
Найти закон движения замкнутой системы при отсутствии задающего воздействия и при начальных условиях Ответ: 4. Найти выходную величину звена с передаточной функцией
если на его вход подан линейно изменяющийся сигнал g(t)=t и начальные условия нулевые. Построить график. Ответ: 5. Для замкнутой следящей системы, передаточная функция которой в разомкнутом состоянии равна
найти выходную величину x(t) при линейном задающем воздействии g(t)=at и нулевых начальных условиях. Ответ:
Пример решения задачи
Передаточная функция разомкнутой следящей системы имеет вид :
Определить первые три коэффициента ошибки, а также добротность по скорости, если k = 100 c-1 ; T1 = 0.01c ; T2 = 0.005c.
Решение Находим передаточную функцию ошибки -
По приведенным выше формулам вычислим коэффициенты ошибки. Учитывая связь коэффициента ошибки С1 с добротностью по скорости
Задачи для самостоятельной работы
1. Передаточная функция замкнутой системы имеет вид.
Найти установившееся значение ошибки (после затухания переходного процесса) при изменении входной величины по закону.
Ответ : 2. Передаточная функция разомкнутой системы имеет вид
Определить первые три коэффициента ошибки, а также добротность по скорости и добротность по ускорению.

В статической системе регулирования (рис. а) передаточная функция разомкнутой системы имеет вид a)
Определить коэффициент передачи m неединичной обратной связи, при котором система приобретает астатизм первого порядка и передаточную функцию разомкнутой эквивалентной системы с единичной обратной б) связью (рис. б). 4. Для предыдущей задачи определить первые два коэффициента ошибки в двух случаях : 1) общий коэффициент усиления прямой цепи k = const. 2) общий коэффициент усиления прямой цепи Пример решения задачи
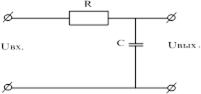
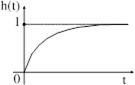
Определить передаточную функцию, переходную и весовую характеристики R-C цепочки и построить графики w(t) и h(t).
Составим уравнения электрической системы Передаточная функция определяется по формуле Продифференцируем второе уравнение системы и учтем, что
Обозначим оператор дифференцирования
где
Определим переходную функцию
Найденные значения коэффициентов А и В подставим в выражение (3). Получим Найдем оригинал Учитывая, что
Задачи для самостоятельной работы
1. Определить и построить переходную и весовую характеристики звена, если его передаточная функция имеет вид 2.
Определить передаточную функцию, переходную и весовую характеристики R-C цепочки и построить графики w(t) и h(t).
3.
Определить передаточную функцию, переходную и весовую характеристики R-L цепочки и построить графики w(t) и h(t).
4. Найти переходную h(t) и весовую характеристики w(t) системы, описываемой уравнением Все коэффициенты положительные:
Ответ: где
5. Найти и построить переходную характеристику системы, если ее передаточная функция имеет вид
Пример решения задачи
Построить ЛАЧХ и ЛФЧХ САУ с передаточной функцией
Решение. Находим сопрягающие частоты:
Действуя в соответствии с описанной методикой, получим ЛАЧХ и ЛФЧХ, представленные на рис. 1.
Рис. 1. ЛАЧХ и ЛФЧХ для примера.
Задачи для самостоятельной работы
1. Построить ЛАЧХ и ЛФЧХ системы с передаточной функцией
2. Построить ЛАЧХ и ЛФЧХ системы с передаточной функцией
3. Построить ЛАЧХ и ЛФЧХ системы с передаточной функцией
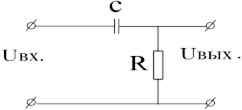
4. По экспериментальным данным построена ЛАЧХ системы, представленная на рис. 2. Определить передаточную функцию системы.
Рис. 2. ЛАЧХ системы для задачи 4.
Типовые динамические звенья Цель занятия: научиться анализировать свойства простейших составляющих автоматических систем при действии на них сигналов различного типа с целью описания свойств системы, в которую входят эти звенья.
Пример решения задачи
Реальное дифференцирующее звено, включенное в ПИД-регулятор, предназначенный для стабилизации программных движений руки робота, должно обеспечить для диапазона частот от 10 до 50 герц опережение по фазе не менее j0=450 и амплитуду выходного сигнала звена не менее амплитуды входного. Подберите параметры звена так, чтобы выполнить эти требования.
Решение. Передаточная функция реального дифференцирующего звена имеет вид Фазовый сдвиг определяется по формуле
По условию задачи для диапазона частот от wmin = 2pnmin = 2p10 сек-1 = =20p10 сек-1 до от wmax = 2pn max = 2p50сек-1 =100pсек-1 должно выполняться неравенство
Отношение амплитуды колебаний на выходе звена к амплитуде колебаний на входе определяется по формуле
Поскольку производная при всех w ³ 0, то A(w) является монотонно возрастающей функцией частоты w. Поэтому коэффициент передачи k > 0 надо выбирать так, чтобы обеспечить неравенство A(w) > 1 при w = wmin и тогда в силу монотонности A(w) это неравенство будет выполняться во всем диапазоне частот от wmin до wmax. Имеем Таким образом, параметры звена T и k должны выбираться с учетом неравенств
Задачи для самостоятельной работы
1. На вход апериодического звена с коэффициентом передачи k = 10 и постоянной времени T = 0.2 сек подаются гармонические колебания g(t)=10sin15t. Определить амплитуду и фазу колебаний на выходе звена. 2. На вход реального дифференцирующего звена с коэффициентом передачи 10 и постоянной времени 0.1 сек подается нарастающий сигнал g(t) = 10t. Какой сигнал установится на выходе? 3. На вход интегрирующего звена с коэффициентом передачи k = 5 подается сигнал g(t) = 5sint + sin5t. Определить, какой сигнал будет на выходе звена. 4. На вход охваченного единичной отрицательной обратной связью интегрирующего звена с коэффициентом передачи k = 4 подается гармонический сигнал g(t) = 10sin12t. Определить амплитуду выходного сигнала. 5. На вход апериодического звена с постоянной времени T=0.1сек и коэффициентом передачи k=10 подается растущий с постоянной скоростью сигнал g(t)=5t. Определить выходной сигнал.
5.5 Краткое описание видов самостоятельной работы 5.5.1 Общий перечень видов самостоятельной работы
1. Оформление отчетов по лабораторным работам. 2. Подготовка к промежуточному контролю знаний. 3. Подготовка к экзамену.
5.5.2 Методические рекомендации по выполнению каждого вида самостоятельной работы
1. Каждая лабораторная работа проводится на основе теоретического материала, пройденного на лекции. Для выполнения лабораторных работ студент перед занятием выполняет подготовку (знакомится с теоретическими сведениями, ходом выполнения работы). По результатам выполнения лабораторных работ студент оформляет отчет по каждой работе согласно методическим указаниям по выполнению лабораторных работ (отчет должен обязательно содержать титульный лист, цель, краткое описание хода работы, необходимые схемы, графики, таблицы, аналитические расчеты). Оформление отчета должно быть выполнено в соответствии с СТО ИрГТУ.005-2007 «Учебно-методическая деятельность. Общие требования к оформлению текстовых и графических работ студентов». Защита работы проводиться в устной форме. В процессе защиты преподаватель работает с каждым студентом индивидуально, выясняя: – знание основных понятий и определений по данной теме; – владение терминологией, понимание смысла своих действий, осмысление полученных результатов и правильность выводов по ним.
2. Для текущего контроля по дисциплине «Теория автоматического управления» предусмотрены вопросы по темам. Для промежуточного контроля знаний предусмотрены тесты (на выбор одного правильного ответа из пяти предложенных альтернатив) по основным разделам курса. При подготовке к тестированию студенту необходимо проработать лекционный материал.
Вариант теста при подготовке к промежуточному контролю знаний по теме «Устойчивость автоматических систем»
1. Автоматическая система 5 порядка устойчива, если ее комплексный характеристический полином при изменении частоты от 0 до 1. π 2. 1.5π 3. 2π 4. 2.5 π 5. 3 π. 2. Автоматическая система устойчива, если корни ее характеристического уравнения : 1. Вещественные и отрицательные. 2. Комплексные, два из них имеют положительную, остальные - отрицательную вещественную часть. 3. Комплексные, два из них имеют положительную, остальные - отрицательную вещественную часть. 4. Комплексные, два из них имеют отрицательную, остальные - положительную вещественную часть. 5. Вещественные и положительные.
3. Для устойчивости автоматической системы необходима, но не достаточна положительность: 1. Определителя Гурвица и всех его диагональных миноров. 2. Всех коэффициентов характеристического уравнения. 3. Вещественной части всех корней характеристического уравнения. 4. Фазового сдвига комплексного характеристического полинома при изменении частоты от нуля до бесконечности. 5. Логарифмической амплитудной частотной характеристики.
4. Максимальный запас устойчивости по фазе определяется на частоте, при которой амплитудная частотная характеристика равна: 1. 0 2. 0.5 3. 1.0 4. 1.5 5. 2.0
5. Устойчивость нелинейной автоматической системы в большом и ее неустойчивость в малом означает: 1. Затухание колебаний в переходном процессе до нуля. 2. Возникновение автоколебательного режима. 3. Неограниченное возрастание колебаний в переходном процессе. 4. Апериодический переходный процесс с малой установившейся ошибкой. 5. Монотонное возрастание отклонения управляемой величины от требуемого значения.
6. В устойчивой нелинейной автоматической системе фазовые траектории: 1. Уходят в бесконечность. 2. Являются замкнутыми кривыми. 3. Не выходят за пределы определенной области, если начинаются вблизи начала координат фазового пространства. 4. То удаляются, то приближаются к границе некоторой области. 5. Отсутствуют внутри определенной области.
3. Подготовка к экзамену заключается в повторении материала, выносимого для итогового контроля знаний (перечень вопросов или тем, вынесенных на экзамен, сообщается студентам преподавателем в конце семестра). Критерием оценки итоговой аттестации являются: 1. Выполнение лабораторных работ согласно графику учебного процесса. 2. Оформление отчетов по лабораторным работам в соответствии с предъявляемыми требованиями. 3. Результаты тестирования (промежуточный контроль знаний). 4. Аргументированный ответ на вопросы в экзаменационных билетах.
Составитель программы Вокин Александр Иннокентьевич, доцент кафедры Оборудования и автоматизации машиностроения, к. х. н.
Иркутск 2013 г. Информация из ФГОС, относящаяся к дисциплине |
||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-06-10; Просмотров: 160; Нарушение авторского права страницы


 .
. .
. ,
, – параметр затухания,
– параметр затухания, – постоянная времени,
– постоянная времени, – коэффициент передачи.
– коэффициент передачи. звено называется консервативным, при
звено называется консервативным, при  – колебательным, при
– колебательным, при  – апериодическим второго порядка.
– апериодическим второго порядка. .
. .
. .
. ,
, .
. .
. .
. ) при нулевых начальных условиях.
) при нулевых начальных условиях. при нулевых начальных условиях.
при нулевых начальных условиях. .
. 
 .
.  -функция и функция веса.
-функция и функция веса.







 на
на  , где
, где  – мнимая единица,
– мнимая единица,  – частота.
– частота. , то частотная передаточная функция обозначается
, то частотная передаточная функция обозначается  и описывает поведение системы при гармонических сигналах. Пример.
и описывает поведение системы при гармонических сигналах. Пример. , (32)
, (32) . (33)
. (33) ,
, – действительная часть,
– действительная часть, – мнимая часть,
– мнимая часть, – модуль,
– модуль, – аргумент.
– аргумент.


 – ФЧХ.
– ФЧХ.
 – входной и выходной сигналы звена (схема 5). В соответствии с принятыми обозначениями и определениями
– входной и выходной сигналы звена (схема 5). В соответствии с принятыми обозначениями и определениями .
.
 строятся графики АЧХ и ФЧХ по зависимостям
строятся графики АЧХ и ФЧХ по зависимостям .
. 
 и определяется по зависимости
и определяется по зависимости , дБ (децибел).
, дБ (децибел).  – частота среза, дБ – децибел.
– частота среза, дБ – децибел. .
. , то сигнал через звено пропускается, а если
, то сигнал через звено пропускается, а если  , то сигнал не пропускается.
, то сигнал не пропускается.
 называется полосой пропускания системы.
называется полосой пропускания системы.
 . (59)
. (59)
 , где
, где  ;
;  – частота, которая меняется в диапазоне от 0 до ∞. В результате получим комплексный полином
– частота, которая меняется в диапазоне от 0 до ∞. В результате получим комплексный полином , (60)
, (60) – действительная часть, а
– действительная часть, а  –мнимая часть характеристического полинома.
–мнимая часть характеристического полинома. , (61)
, (61) ,
, . (62)
. (62)
 Рис. 18. Система на границе устойчивости.
Рис. 18. Система на границе устойчивости.
 Рис. 19. Неустойчивая система.
Рис. 19. Неустойчивая система.

 – задающее воздействие, равное желаемому значению выходной переменной
– задающее воздействие, равное желаемому значению выходной переменной  ;
;  – ошибка системы;
– ошибка системы;  – передаточная функция разомкнутой системы, представленная в виде
– передаточная функция разомкнутой системы, представленная в виде . (63)
. (63) – коэффициент передачи разомкнутой цепи,
– коэффициент передачи разомкнутой цепи,  – степень астатизма.
– степень астатизма. система называется статической, при
система называется статической, при  система называется астатической первого, второго, … порядков.
система называется астатической первого, второго, … порядков. . (64)
. (64) . (65)
. (65) . (66)
. (66) , где, как и ранее,
, где, как и ранее,  ,
,  . (67)
. (67) , при котором выполняется условие (67), является корнем характеристического уравнения (66), т.е.
, при котором выполняется условие (67), является корнем характеристического уравнения (66), т.е.  , что соответствует границе устойчивости. Но
, что соответствует границе устойчивости. Но  является частотной передаточной функцией разомкнутой системы.
является частотной передаточной функцией разомкнутой системы. ) представлены на рис. 20, а для астатической системы (
) представлены на рис. 20, а для астатической системы (  ) – на рис. 21.
) – на рис. 21. Рис. 20.
Рис. 20.
 Рис. 21.
Рис. 21.
 частотная передаточная функция разомкнутой системы, 1 – замкнутая САУ устойчива, 2 – замкнутая САУ на границе устойчивости, 3 – замкнутая САУ неустойчива.
частотная передаточная функция разомкнутой системы, 1 – замкнутая САУ устойчива, 2 – замкнутая САУ на границе устойчивости, 3 – замкнутая САУ неустойчива. и выходной сигнал
и выходной сигнал  ):
):


 , (110)
, (110) ,
,  ,
,  ,
,  – коэффициенты, можно определить координатами
– коэффициенты, можно определить координатами ,
,  ,
,  . (111)
. (111) (112)
(112) . (113)
. (113) , для системы (112) вектор состояния
, для системы (112) вектор состояния  .
. ,
, – постоянная времени,
– постоянная времени,  – параметр затухания. При 1)
– параметр затухания. При 1)  система гранично устойчива, 2)
система гранично устойчива, 2)  система асимптотически устойчива, 3)
система асимптотически устойчива, 3)  система неустойчива. На рис. 35а представлены процессы изменения координаты (переменной)
система неустойчива. На рис. 35а представлены процессы изменения координаты (переменной)  , на рис. 35б – скорости
, на рис. 35б – скорости  изменения координаты
изменения координаты  для трёх указанных случаев, на рис. 35в – фазовый портрет, построенный по указанным переменным.
для трёх указанных случаев, на рис. 35в – фазовый портрет, построенный по указанным переменным.

 и для каждого момента на рис. 35в построить точку. Соединив эти точки, получим соответствующие фазовые траектории. На рис. 35в стрелками показаны направления движения изображающих точек. Направление движения изображающей точки можно определить непосредственно по рис. 35в следующим образом. В верхней (нижней) полуплоскости
и для каждого момента на рис. 35в построить точку. Соединив эти точки, получим соответствующие фазовые траектории. На рис. 35в стрелками показаны направления движения изображающих точек. Направление движения изображающей точки можно определить непосредственно по рис. 35в следующим образом. В верхней (нижней) полуплоскости  , где
, где  – скорость изменения
– скорость изменения 
 ,
,  ,
,  ,
,  . Здесь
. Здесь  - номер фамилии студента в списке группы.
- номер фамилии студента в списке группы. при отключенном возмущающем, получить график ошибки
при отключенном возмущающем, получить график ошибки  . Определить по графику величину установившейся ошибки
. Определить по графику величину установившейся ошибки  , определить по ней
, определить по ней  - статизм САУ по задающему воздействию.
- статизм САУ по задающему воздействию. при отключенном задающем, получить график ошибки
при отключенном задающем, получить график ошибки  . Определить по графику величину установившейся ошибки
. Определить по графику величину установившейся ошибки  , определить по ней
, определить по ней  - статизм САУ по возмущающему воздействию.
- статизм САУ по возмущающему воздействию. , сохранив остальные параметры прежними и повторить п.п. 1.2 - 1.3.
, сохранив остальные параметры прежними и повторить п.п. 1.2 - 1.3. при исходном значении
при исходном значении  и
и  и
и  аналитически, выписав передаточные функции ошибки по задающему и возмущающему воздействиям. Сравнить степень изменения статизма с полученным в п. 1.6.
аналитически, выписав передаточные функции ошибки по задающему и возмущающему воздействиям. Сравнить степень изменения статизма с полученным в п. 1.6. при отключенном возмущении. Получить график ошибки
при отключенном возмущении. Получить график ошибки  , определить по графику величину постоянной составляющей ошибки
, определить по графику величину постоянной составляющей ошибки  , определить
, определить  - добротность САУ по скорости относительно задающего воздействия.
- добротность САУ по скорости относительно задающего воздействия. , сохранив остальные параметры прежними и повторить п. 3.2.
, сохранив остальные параметры прежними и повторить п. 3.2. при исходном значении
при исходном значении  и остальных параметров, затем повторить п. 3.2.
и остальных параметров, затем повторить п. 3.2. .
. аналитически, выписав передаточную функцию ошибки по задающему воздействию. Сравнить степень изменения добротности с полученной в п. 3.5.
аналитически, выписав передаточную функцию ошибки по задающему воздействию. Сравнить степень изменения добротности с полученной в п. 3.5. , где
, где  - номер фамилии студента в списке группы.
- номер фамилии студента в списке группы.
 и получить переходную характеристику звена.
и получить переходную характеристику звена. и получить импульсную переходную характеристику звена.
и получить импульсную переходную характеристику звена. и получить частотные характеристики звена: амплитудную
и получить частотные характеристики звена: амплитудную  и фазовую
и фазовую  .
.
 , а постоянную времени
, а постоянную времени  положить
положить  , где
, где 
 и постоянную времени
и постоянную времени  7.1. Собрать схему САУ, состоящую из одного интегрирующего звена с замедлением.
7.1. Собрать схему САУ, состоящую из одного интегрирующего звена с замедлением. взять те же, что и в п. 5.1.
взять те же, что и в п. 5.1.



 Здесь
Здесь  - номер фамилии студента в списке группы. Коэффициент передачи канала компенсации
- номер фамилии студента в списке группы. Коэффициент передачи канала компенсации  задать произвольным.
задать произвольным. при отключенном задающем, получить график ошибки
при отключенном задающем, получить график ошибки  . Определить по графику величину установившейся ошибки
. Определить по графику величину установившейся ошибки  .
. и повторяя для каждого значения
и повторяя для каждого значения  п. 1.2, подобрать такое значение
п. 1.2, подобрать такое значение  , при котором установившаяся ошибка отсутствует -
, при котором установившаяся ошибка отсутствует -  .
. аналитически, выписав передаточную функцию ошибки по возмущающему воздействию. Сравнить полученное значение с найденным в п. 8.3 экспериментально.
аналитически, выписав передаточную функцию ошибки по возмущающему воздействию. Сравнить полученное значение с найденным в п. 8.3 экспериментально. = 0.02,
= 0.02,  = 0.05,
= 0.05,  =
=  =
=  = 1,
= 1,  = num, где num - номер фамилии студента в списке группы.
= num, где num - номер фамилии студента в списке группы. , получить переходную характеристику. Сделать вывод об устойчивости САУ при данных значениях параметров.
, получить переходную характеристику. Сделать вывод об устойчивости САУ при данных значениях параметров. , получить график ошибки е( t ), убедиться в наличии постоянной составляющей ошибки
, получить график ошибки е( t ), убедиться в наличии постоянной составляющей ошибки  .
. и повторяя п. 9.2, определить экспериментально критическое значение коэффициента усиления
и повторяя п. 9.2, определить экспериментально критическое значение коэффициента усиления  , при превышении которого САУ теряет устойчивость (возникают незатухающие колебания).
, при превышении которого САУ теряет устойчивость (возникают незатухающие колебания). ), величину а взять равной нулю,
), величину а взять равной нулю,  , определенного в п. 9.5.
, определенного в п. 9.5. , получить переходную характеристику. Сделать вывод об устойчивости САУ при данных значениях параметров.
, получить переходную характеристику. Сделать вывод об устойчивости САУ при данных значениях параметров. , при превышении которого САУ становится устойчивой (исчезают колебания возрастающей амплитуды).
, при превышении которого САУ становится устойчивой (исчезают колебания возрастающей амплитуды). - коэффициент сопротивления.
- коэффициент сопротивления. , введем обозначения
, введем обозначения  и получим уравнение
и получим уравнение (1)
(1)
 ; предположим k > n
; предположим k > n ; где
; где 
 (2)
(2) (3)
(3) и
и  , подставим начальные условия
, подставим начальные условия  ;
;  ;
;  в уравнение движения и уравнение скорости.
в уравнение движения и уравнение скорости.











 . Найти закон изменения выходной величины x(t) при отработке системой рассогласования x0 при отсутствии задающего воздействия и нулевой начальной скорости
. Найти закон изменения выходной величины x(t) при отработке системой рассогласования x0 при отсутствии задающего воздействия и нулевой начальной скорости





 ,
,
 ,
,

 .
.




 , получим
, получим  .
.






 (принять в данном случае
(принять в данном случае  , полагая, что
, полагая, что  ) Ответ :
) Ответ : 

 - сила тока
- сила тока (1)
(1)  Выражение (1) примет вид
Выражение (1) примет вид (2)
(2) - подставляем в первое уравнение системы
- подставляем в первое уравнение системы 
 ;
; - постоянная времени R-C цепочки
- постоянная времени R-C цепочки (3)
(3)


 , получим
, получим 





 ,
, - абсолютные значения корней характеристического уравнения
- абсолютные значения корней характеристического уравнения






 , где параметры k > 0 (коэффициент передачи) и T > 0 (постоянная времени) подлежат выбору в соответствии с условиями задачи.
, где параметры k > 0 (коэффициент передачи) и T > 0 (постоянная времени) подлежат выбору в соответствии с условиями задачи.
 , откуда находим
, откуда находим 
 .
.
 , откуда находим
, откуда находим  ,
, ,
,  приобретет фазовый сдвиг на:
приобретет фазовый сдвиг на: