
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Системы нелинейных дифференциальных уравнений различных порядков
Системы нелинейных дифференциальных уравнений (СНДУ) являются широко используемой формой представления нелинейных систем управления для численного исследования. В общем виде модель в форме СНДУ записывается следующим образом:
начальные условия: где:
Данная форма представления более характерна пакетам программ, предполагающим значительные преобразования модели, например трансляцию модели в функцию языка программирования и присоединение ее к расчетной части при построении расчетной задачи. Это снимает почти все ограничения на сложность модели, которая по сути дела программируется. В форме СНДУ можно представлять более широкий класс моделей чем в НФК. Недостатком данной формы представления является, так же как и в случае НФК, отсутствие полной информации о структуре модели, что затрудняет решение многих задач топологического характера. Решение этой проблемы возможно при упорядочивании порядка следования уравнений, так что в i-ом уравнении переменная xi являлась следствием. Такой подход встречается в ряде работ, например первые версии пакета NOCSYD [А2, А3]. Графы Использование теории графов для описания моделей систем управления со сложной структурой, стало распространенным в последнее время. Теоретико-графовая форма описания модели позволяет эффективно использовать новые возможности языков программирования, такие как указатели, списки, классы, множественное наследие. Представление в форме ориентированного (сигнального) графа, в частности структурной схемы, расширяет информацию о модели, по сравнению с НФК и СНДУ, позволяя вводить причинно-следственные отношения. Знание о направленности связей имеет большое значение для задач анализа и синтеза. В качестве иллюстрации на рис. 1.1. приведена диаграмма графа модели странного аттрактора Лоренца. Эта форма представления позволяет эффективнее решать задачи выделения путей и контуров, связности, структурной управляемости и многие другие, чем в форме НФК и отчасти СНДУ. Модель системы представляется ориентированным графом H=< G, H> с множеством переменных Х=x1, ...., xn, N - общее множество вершин, и множеством дуг G - упорядоченных пар номеров смежных вершин (i, j), G=(i, j)1, ... (i, j)n. Общее количество таких пар обозначено в примерах как Q. Несмотря на всю компактность и удобство такой записи, на практике чаще используют матрицу смежности R = rij, показывающую наличие дуги между i-ой и j-ой вершинами.
Рис. 1.1. Модель странного аттрактора в форме ориентированного графа
Рис. 1.2. Модель системы в форме графа
Рис. 1.3. Модель системы в форме гиперграфа
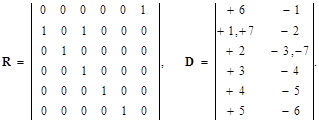
Рис. 1.4. Модель странного аттрактора в форме гиперграфа Другим способом представления топологии является матрица изоморфности D, в строках которой представлены номера входящих (с плюсом) и выходящих (с минусом) дуг. Для приведенного на рис. 1.2 примера матрицы смежности и изоморфности имеют вид:
Избыточность хранимой информации в матрице смежности (нулевые значения) компенсируются простотой вычислительных алгоритмов и скоростью получения требуемой информации из матрицы. Кроме того, наличие только двух значений 0 или 1, дает возможность использовать для ее представления битовые поля, что дает значительную экономию памяти, и при размерах системы порядка 100 элементов не уступает по затратам ресурсов на хранение матрицы изоморфности, при значительно более простых алгоритмов обработки информации. Использование матриц смежности, инцидентностей, достижимостей и др. имеет большое применение для алгоритмов топологического анализа СС НСУ. Ориентированные графы (структурные схемы) обычно широко используются при описании линейных систем и систем с одновходовыми нелинейностями. Однако возникают некоторые затруднения при описании нелинейных систем, где нелинейные функции могут зависеть от нескольких переменных, например при описании операций умножения и деления. Гиперграфы Гиперграф являются теоретико-множественной формой представления дифференциальных уравнений, заданных в общем случае не причинно—следственным способом. По сравнению с графом, представление модели в форме гиперграфа расширяет возможности представления многовходовых элементов, однако при этом теряется информация о направленности связей. Гиперграф определяется как пара H = < X, E > образующая конечное множество X=x1,..., xn вершин и некоторое семейством E=e1,..., eq ребер - непустых частей Х, удовлетворяющих условию UE=X. Одним из способов задания топологии гиперграфа, является матрица
Гиперграф является вариантом симплециального комплекса или симплециальной схемы.
Лекция №12. Популярное:
|
Последнее изменение этой страницы: 2016-03-15; Просмотров: 1249; Нарушение авторского права страницы


 - внешние воздействия и их производные,
- внешние воздействия и их производные,  - внутренние переменные, включая выходные и их производные.
- внутренние переменные, включая выходные и их производные.



 , где
, где