|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Принцип разомкнутого управления (управление по входному воздействию).
Управляющее воздействие формируется только на основе задающего воздействия без учета внешних возмущений. Функциональная схема системы: ЗУ – задающее устройство, предназначено для формирования сигнала задающего воздействия. УУ – устройство управления, которое на основе задающего воздействия формирует управляющее воздействие u(t). Основное достоинство: простота конструкции. y(t)=f(g(t)); y(t)=f1(u(t), f(t)); u(t)=f2(g(t)) Основной недостаток системы: низкая точность, связанная с тем, что влияние возмущающих воздействий на выходную величину не контролируется. Область использования: работа при стабилизированных внешних воздействиях. Например, лабораторные измерительные приборы, системы охранной и пожарной сигнализации, система стабилизации скорости вращения двигателя постоянного тока. Зарисуем последний пример:
Принцип компенсации. Из числа возмущающих воздействий выбирается одно или несколько доминирующих, их изменения измеряются и результаты измерения используются в качестве дополнительных воздействий на объект.
Основная область использования: системы с термокомпенсацией (Система автоматической компенсации длины маятника). Достоинство: точность выше по сравнению с разомкнутым управлением. Недостаток: при большом количестве возмущающих воздействий система становится сложной в настройке и обслуживании. Принцип управления по отклонению (принцип обратной связи).Принцип Ползунова-Уатта. В таких системах путем преобразования регулируемой величины формируют сигнал обратной связи, который сравнивают с сигналом задающего воздействия. Если в результате сравнения обнаруживается отклонение этих величин (ошибка рассогласования), регулятор работает на устранение этой ошибки.
ЧЭ – чувствительный элемент для преобразования регулируемой величины в форму, удобную для сравнения с задающим воздействием. СУ – сравнивающее устройство, предназначено для получения ошибки рассогласования: x(t)=g(t)-yx(t) Помимо операции сравнения сравнивающее устройство может изменять масштаб или природу ошибки рассогласования. В этом случае: x(t)=Ксу(g(t)-yx(t)) Системы с обратной связью имеют наибольшую точность регулирования, поэтому по такому принципу строится большинство систем. САР частоты вращения двигателя постоянного тока (пример):
!!! Чем выше скорость, тем выше сигнал обратной связи ТГ – тахогенератор(преобразовывает скорость вращения в напряжение). Δ U=UЗ-UТГ ТГ- это ЧЭ, Итт- сигнал обратной связи Достоинства: высокая точность; Недостатки: введение обратной связи в систему замедляет ее работу и ухудшает динамические свойства.
Типовая функциональная схема САР. Большая часть САР строится по принципу обратной связи.
ДР – датчик регулятора ЗУ – задающее устройство; СМ – сервомеханизм; СУ – основное сравнивающее устройство (для получения сигнала ошибки рассогласования). ПЭ – преобразовательные элементы (для преобразования уровня или физической природы сигналов в различных точках системы). Могут находится в любом месте схемы в любом количестве. У – усилитель (для усиления ошибки рассогласования с целью повышения чувствительности системы). ОР - объект регулирования; ИУ – исполнительно устройство (для формирования управляющего воздействия u(t) и находящееся непосредственно перед объектом. Система состоит из ОР и регулятора, в состав которого входят датчик, который предназначен для формирования ошибки ДР на основе которой сервомеханизм формирует управляющее воздействие. Для системы в целом и ее составляющих входными и выходными сигналами будут являться следующие параметры:
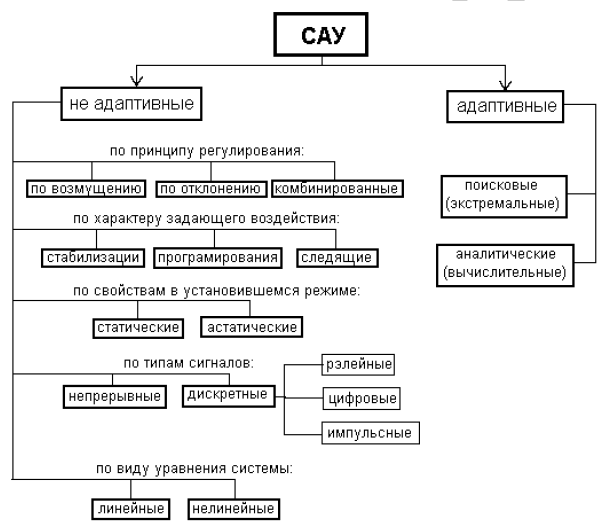
Классификация САР. Неадаптивные системы — это системы, в которых не предусмотрена автоматическая настройка при изменении характеристик внешних воздействий или параметров самой системы с целью обеспечения оптимального процесса управления. Настройку такой системы обычно -выполняет человек. Адаптивные системы — это системы, которые в зависимости от условий работы (характеристик воздействий и параметров самой системы) изменяют свою настройку, обеспечивая для каждой совокупности условий наивыгоднейший режим работы. Линейные – для которых справедлив принцип суперпозиции: Реакция обьекта на сумму входных воздействий равна сумме реакций обьекта на каждое воздействие в отдельности. Л (X1 + X2 + … + Xn) = Л (X1) + Л (X2) + … + Л (Xn); Нелинейные – не справедлив закон суперпозиции; Непрерывные – аналоговые сигналы (ток, напряжение) Дискретные (импульсные, цифровые, релейные). Выходные устройства – механическое реле, твердотельное реле, симистор, тиристор, транзисторный ключ, интерфейс. Стабилизирующие – поддерживает регулируемый параметр на постоянном значении заданной точки. Программные –изменяет регулируемую величину в соответствии с функцией задания во времени – программные задатчики. Следящие – задача состоит в том, чтобы изменения регулируемой величины следили за изменениями другого параметра.
Стабилизирующие САР. Алгоритм функционирования заключается в поддержании выходной величины на постоянном уровне. Уравнение системы: y=c+kΔ x – для статического режима. с – константа, которая соответствует номинальному значению выходной величины; Δ x – ошибка рассогласования; k – коэффициент передачи системы. В идеале Δ x→ 0; y→ c. Пример: САР частоты вращения двигателя постоянного тока:
ω – частота вращения вала-регулируемая величина. Мс - момент нагрузки-возмущающее воздействие; Основной причиной отклонения ω является изменение момента нагрузки на валу двигателя и Uп. UТГ=КТГ·ω Напряжение рассогласования Δ U=UЗ-UТГ=UЗ-КТГ·ω В статическом режиме Δ U→ 0 и соответственно UЗ=КТГ·ω ω =UЗ/КТГ=С ω =UЗ/КТГ+ Δ U·Кy·Кq·КТГ Программные САР. Алгоритм функционирования заключается в изменении выходной величины по заранее заданному закону. Для этого в стабилизирующую систему добавляют дополнительный программный элемент, с помощью которого изменяют задающее воздействие по заданной программе. Функциональная схема такой системы выглядит следующим образом:
П – программный элемент. Может быть функцией F(z), где z – независимая переменная. Система регулирования температуры в закалочной печи (пример):
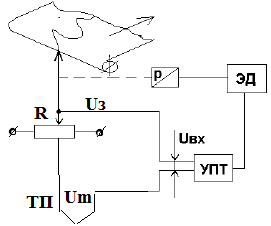
Следящие САР. Алгоритм функционирования заключается в изменении выходной величины по заранее неизвестному закону. В этом случае задающее воздействие формируется внешними условиями или оператором. В зависимости от физической природы различают: -системы воспроизводства угла; -частота вращения; -момента; -электрических величин. Система регистрации температуры (пример):
Когда t0=const(Um=Uз), Uвх=0, сигнал на выходе =0. Когда t0 изменен, изменен и Um, появляется Uвх которое усиливает и которое поднимает перо самописца.
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 844; Нарушение авторского права страницы



 К – компенсатор.
К – компенсатор.